基于多条件四维航迹预测方法
2022-09-14祁振杰
祁振杰
民航贵州空管分局 贵州 贵阳 550005
引言
自2005年国际民用航空组织(ICAO, International Civil Aviation Organization)提出“基于航迹的运行”(TBO,Trajectory Based Operations)以来,2020年2月民航局空管局发布了《中国民航空管基于航迹运行(TBO)运行概念》[1]。TBO是对航空器全生命周期的四维航迹(4DT, 4Dimensional Trajectory)为基础,在空管部门、航空公司、机场、航空器等相关方实时和动态维护航迹信息,进而实现多方协同决策。当前,空管自动化系统作为管制指挥使用最多、与管制指挥最为密切相关的重要核心系统,在空管自动化系统中实现高精准的“4DT航迹预测”,为“基于航迹的运行”的理念在空管部门中落地、实施,有着很强的现实意义。
1 背景与现状
ICAO最新发布的《全球航行计划》第六版(GANP,Global Air Navigation Plan - Sixth Edition)中,TBO是航行系统组块升级(ASBU,Aviation System Block Upgrades)各引线继承的总目标,计划在2031年之前分三个阶段逐步进行实现。当前,欧美航空发达国家已经在新一代空管系统的发展规划中将TBO作为核心理念,全球各大研究机构、设备厂商也高度重视TBO技术标准制定和装备升级。为实现民航强国战略构想,践行“智慧民航”的理念,我国民航各个企事业单位正积极开展以TBO为代表的空管新理念新技术的研究、开发、验证以及应用推广工作。
TBO的实现完全依托于4DT的全生命周期。就当前技术发展的程度而言,“4DT预测计算”的较大方面都体现在空管自动化系统(ATC,Air Traffic Control System)之中。截至2021年12月10日,贵阳现场使用的主用莱斯Numan2000系统不具备4DT预测的功能,备用二所Air Net自动化系统已经具备初步的4DT预测计算的功能,但是预测的精度与准确性都有待进一步提高。
“4DT预测计算”未来将成为空管自动化系统的一项基本功能,直接关系着管制人员使用空管自动化系统指挥航空器的体验,其中包含预计经过扇区的“预管制状态”预测、未飞航迹高度的预测、过点时间的预判等一系列管制指挥特别关注和必须提前掌握的信息,精准的预测航迹的“4DT轨迹”不仅在调配航空器间的冲突,增加管制指挥安全冗余度等方面,都对管制指挥工作产生直接的影响。所以,“4DT航迹预测”计算功能在空管自动化系统功能中,是当前的研究热点与难点。
2 基本概念
空管自动化系统是空中交通管制指挥的核心系统,该系统能够大幅提升空中交通管制效率,随着航班的流量日益增长,管制指挥人员的面对的指挥、调配航空器的冲突压力也随之增加,监视数据航迹预测的准确性、及时性以及适当量的“4DT航迹预测”就成为空中交通指挥保障飞行安全的重要手段与方式。
具体来讲,4DT是由一系列的点连接而成的飞行路径,每个点在四个维度(经度、纬度、高度、时间)都有一定的精度要求,并以此描述飞行的运行过程。4DT的航路点上包含“可控到达时间”,确保航空器全程“可控、可达”。
当前,接入空管自动化系统的监视数据源包含S模式或A/C模式雷达数据、广播式自动相关监视数据(ADS-B, Automatic Dependent Surveillance-Broadcast的缩写)[2]、多点定位技术监视数据(MLAT,multilateration 的缩写)等。对于以上接入空管自动化系统的各类监视源数据,在空管自动化系统中经过融合处理,形成系统综合航迹。对于空管自动化系统而言,“航迹预测”功能的实现,就依赖于空管自动化系统中的航迹4D计算,其中的4D轨迹计算(4D Trajectory Prediction)根据航空器的飞行路线、机型、天气等基本属性,通过预测计算航空器经过飞行路线沿途各个航路点的位置(经纬度)、高度、时间,从而得到航空器的4D轨迹模型。有赖于4D轨迹模型的建立,地面上的空中交通管制指挥人员就可以依据航迹的预测提前做好航空器的间距(分为垂直、水平方向)调配,做好冲突化解于未然,提高管制指挥的安全冗余度。
3 多条件的预测计算
本文就针对如何提高空管自动化系统中4DT预测计算的准确性,提出基于多条件进行4DT预测计算方法,以达到提高4DT轨迹预测计算的准确性与精度,为空管自动化系统实现4DT航迹预测提供思路。
4DT的预测计算,分为水平方向和垂直方向上的推测计算。水平方向上航空器的位置变化一般会严格按照领航飞行计划报(FPL,filed flight plan message的缩写)中描述的航路、航线或者进离场程序中描述的线路进行改变,而且航路、航线上的固定报告点或者进离场程序的线路点包含经度、维度等信息。垂直方向上航空器的高度变化,就依赖于航空器飞行剖面模型进行预测计算。可以看出,空管自动化系统中的4DT的预测计算,核心的计算要素为航空器的预计过点高度与过点时间信息。对航空器的过点高度与过点时间的预测计算,需要根据航空器的飞行阶段,进行剖面模型阶段划分,从而提高预测计算在不同飞行阶段的预测精准度。
传统的航空器飞行剖面模型[3-4],分为起飞、爬升、巡航、进场、进近、着陆6个,分属于爬升阶段、巡航阶段、下降阶段3个阶段。其中起飞、爬升属于爬升阶段,巡航属于巡航阶段,进场、进近、着陆属于下降阶段。另外,关于航空器处于哪个阶段的判断,超出了本文的讨论范围,笔者将在未来的文章中进行描述与讨论。
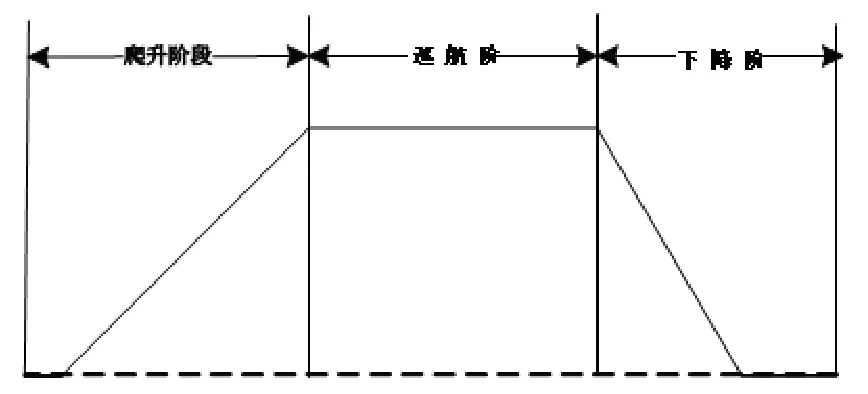
图1 传统的航空器飞行剖面模型
通过为航空器建立基本飞行剖面模型的阶段划分,根据航空器的飞行高度层,并结合欧洲航行安全组织(EUROCONTROL,简称:欧控)实验中心提供常见飞机的飞行性能数据库BADA(Base of Aircraft Data的缩写)获取航空器在各个高度层的典型飞行速度,从而推测计算航空器的4D轨迹模型。
空管自动化系统根据航空器的4D轨迹模型,实现航空器实时状态管理、推算航空器将经过哪些管制扇区、计算航空器下一个即将进入的扇区、精准的过点高度和过点时间等功能。在不同的飞行阶段,为航空器建立基本的飞行剖面,不同的阶段适用不同的推测条件。根据现有的技术发展水平,涉及的多条件主要有如下几种:
3.1 基于人工干预的条件
航空器的空中飞行时依赖于地面管制的指挥,管制人员为了调配航空器冲突,会根据实际情况对航空器进行干预,在空管自动化系统中设置CFL高度(指令高度)。在下降阶段中,进近时刻因调配冲突的工作需要管制指挥人员会发布指令使航空器绕圈(保持高度)或者使航空器在空中盘旋等待或下降。以下简称“条件1”。
3.2 基于历史数据的条件
近5年来,数据挖掘技术、大数据分析历史数据[5-6],促进了对轨迹挖掘应用的研究与广泛应用。数据挖掘、机器学习、大数据分析历史数据的发展,促进了4DT轨迹预测计算应用的发展。经过大数据统计,得出一定的结论:起飞机场、目的地机场相同,过点时间间隔在无特殊情况时一定程度与精度下是相同的;同一时间段飞越航空器的过点时间间隔时相同的。以下简称“条件2”。
3.3 基于实时飞行数据的条件
近年来,随着基于S模式雷达、ADS-B信号接入空管自动化系统中,在空管自动化中收到的机载下行数据中包含实时飞行信息,比如实时飞行速度、飞行员拨表高度等重要的机载数据,可以根据实时的记载下行数据进行航迹预测计算的调整与推测。以下简称“条件3”。
阶段一:爬升阶段。
水平方向:按照离场程序中的路线进行变化,根据“条件1”和“条件3”中的航空器实时水平速度信息,预测计算过点时间。
垂直方向:按照离场程序中的路线进行变化,根据“条件1”和“条件3”中的航空器实时垂直速度信息,预测计算过点高度信息。正常情况下,航空器在爬升阶段不会出现高度下降的情况,因此,预测计算的下一点高度应该不低于当前的过点高度。
阶段二:巡航阶段。
水平方向:综合“条件1”、“条件2”和“条件3”。根据航空器的机型,由BADA数据获取对应航空器机型在各个飞行高度层的典型速度,通过典型速度预测计算航空器未来经过航路点的过点时间。实时根据“条件3”中的航空器实时水平速度信息,预测计算过点时间。并根据“条件2”中的过点时间间隔差,修正过点时间。
垂直方向:综合“条件1”、“条件2”和“条件3”。根据“条件1”中的修改预测计算的高度信息,以及“条件2”,预测计算过点高度信息,综合“条件3”中的航空器实时垂直速度信息,修正预测结果。
阶段三:下降阶段。
水平方向:按照进场程序中的路线进行变化,根据“条件1”和“条件3”中的航空器实时水平速度信息,预测计算过点时间。
垂直方向:按照进场程序中的路线进行变化,根据“条件1”和“条件3”中的航空器实时垂直速度信息,预测计算过点高度信息。正常情况下,航空器在下降阶段一般情况下不会出现高度上降的情况,因此,预测计算的下一点高度应该不高于当前的过点高度。
空管自动化系统在实现“4DT航迹预测”计算时,需要依据航空器在不同的阶段结合不同的预测条件,从而使空管自动化系统的航迹预测计算精度不断提高。总之,基于多条件4DT航迹预测将会是空管自动化系统一项亟待提升的核心功能需求,此项功能的高精度与高准确度的实现,必须依赖于国内各个空管自动化系统的生产厂家深入研究与测试实施。
4 结束语
本文最新的基于航迹的运行概念,通过阐述空管自动化系统中航迹预测功能的重要性,依据航空器剖面模型的不同阶段综合考虑不同条件的组合,充分考虑管制人为调配因素、历史数据规律、实时动态数据三个条件,给在空管自动化系统中对4DT预测预测计算实现提供一定的方法依据。这种根据不同飞行阶段结合不同条件预测的方式,综合多个影响因素的影响,再进行多条件4DT轨迹预测计算,能够大大提高预测航迹的准确性与精度,为未来新一代空管自动化系统中航迹预测功能实现提供一种思路。
