双馈异步风机非线性低电压穿越控制策略研究
2022-09-13王顺江李志伟王洪哲
王顺江,李志伟,王洪哲,金 鹏,葛 朋
(1.国网辽宁省电力有限公司,辽宁 沈阳 110006;2.东北电力大学,吉林 吉林 132012;3.国家能源集团双辽发电有限公司,吉林 双辽 136400)
0 引言
双 馈 异 步 风 机 (Doubly-Fed Induction Generator,DFIG)作为应用最为广泛的主流电机,在风电领域占有很高的份额。由于双馈风机自身结构对于电网故障的反应较为敏感,因此对其进行深入研究,实现机组的低电压穿越,对于电网运行的安全与稳定具有至关重要的意义。
为了实现低电压穿越,文献[1]提出了基于反向电流跟踪的双馈异步风机低电压穿越控制策略。该控制策略通过将定子的电流乘以一定的系数作为对转子电流矢量进行控制的指令值。然而,该系数值的选择对控制效果影响很大,而且不能明显地对端电压进行控制,无法提供无功功率来完成电网电压的快速恢复。文献[2]提出了一种消除谐波过渡过程中谐波分量的控制策略。该控制策略通过对电磁过渡过程进行定量分析,得到了电网发生故障时电压跌落过程中暂态电流的具体解析表达式。该方法在电网跌落后对端电压的控制能力有限,无法解决电网故障后的功角跳变问题。文献[3]提出了一种将滑模控制(SMG)与 比 例 积 分 控 制(Proportional Plus Integral,PI)结合起来的控制策略,可以实现对功率的解耦控制。然而,其控制效果受参数选择的影响较大,而参数的选择是通过经验和试凑方法获得的。文献[4]提出了一种在对前馈瞬时电流进行控制的基础上,对转子变换器进行控制的方法,但无法完成电网故障过程中对端电压幅值的控制,且不能注入无功电流,不利于端电压的控制和后期的恢复。
本文提出了一种基于dq轴旋转坐标系的双馈风机内电势串级控制(Internal Voltage Cascade Control,IVCC)策略,主要是通过调整内电势dq轴分量,从而实现自动电压调节(Automatic Voltage Regulation,AVR)和 最 大 功 率 跟 踪(Maximum Power Point Tracking,MPPT)控制。该控制策略综合现有转子电流控制和磁链幅值相角控制的特点和优势,通过矢量定向技术实现解耦控制,同时具备磁链幅值相角控制阻尼表现好、端电压恢复能力强的优点。由于无须经过极坐标系到dq坐标系的变换,减少了引入耦合的环节,进一步改善了双馈风机动态特性。该控制策略引入功角补偿器,限制故障中双馈风机功角突变,降低了在发生故障时的端电压的跌落值,提高了双馈风机故障穿越能力。与磁链幅值相角控制(Flux Magnitude and Angle Control,FMAC)和基于反馈线性化的LQR控制(Linear Quadratic Regulator Control,LQRC)相 比,所设计的控制器具有更好的端电压控制能力。
1 双馈异步风机的结构和变速恒频运行原理
1.1 双馈风力发电机组的结构
双馈异步风力发电机(Doubly-Fed Induction Generator,DFIG)是由风轮、齿轮箱和双馈异步感应发电机构成(图1)。
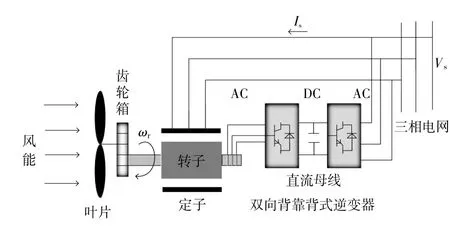
图1 双馈异步风机的结构图Fig.1 Structure diagram of doubly-fed induction generator
双馈异步发电机的定子侧与电网直接连接,通过升压变压器接入电网;转子侧经过励磁变换器接入升压变压器,并且经过变压之后通入电网。功率是馈入转子还是从转子中提取,取决于其实际的运行条件。在超同步的运行状态下,功率通过转子经过变流器馈入电网;在欠同步工作的状态下,功率通过电网馈入转子侧。在这两种情况下,定子侧都通过变流器向电网馈电[5]。双馈异步风力发电机有独立的转子励磁绕组,能够进行功率因数的调节,发电机的转速可以调节在同步旋转速度的±30%之内。双馈风机同时兼备了同步电机和异步电机的特点。
1.2 DFIG变速恒频的工作原理
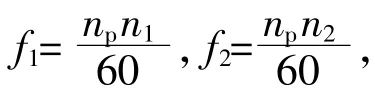
为了实现变速恒频持续工作,当风速变化时,发电机转速也相应地随之变化。因此,应调整转子励磁电流的频率,使定子输出频率保持恒定[6]。双馈异步风机在运行过程中的关系如下:

式中:n1为定子磁场的同步旋转磁场转速;n2为转子旋转磁场相对于转子的转速;nr为转子的转速。

当发电机的转子转速发生改变的时候,就可以通过控制改变励磁电流的频率来保证定子输出频率的恒定,从而实现双馈风机变速恒频运行(图2)。当发电机的输出转速比定子产生的旋转磁场的同步转速小时,风机处于亚同步运行状态,f2>0;转子励磁电流产生的旋转磁场与转子的旋转方向保持一致,电网通过励磁变换器向转子输入转差功率。当发电机输出转速高于定子磁场产生的旋转磁场的同步转速时,f2<0,风机处于超同步运行状态,转子绕组通过励磁变流器向电网输出转差功率。当f2=0时,电网和转子绕组之间实现无功功率之间的交换,磁链变流器给转子提供直流励磁。
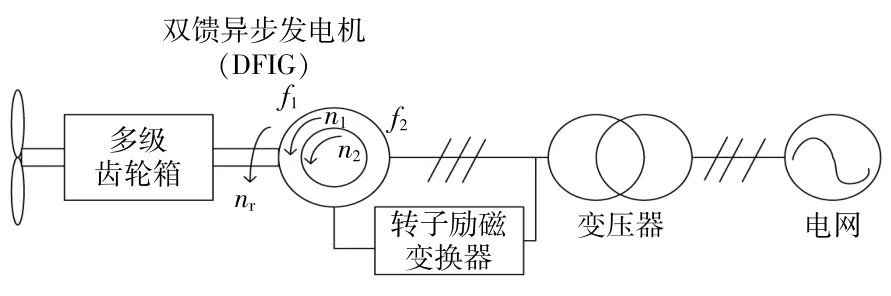
图2 双馈风机结构与变速恒频运行的原理图Fig.2 The structure of the doubly-fed induction generator and the principle of variable speed and constant frequency operation
转子侧励磁变换器最常见的结构为两电平电压型双PWM变换器,其结构如图3所示。两个相同的三相电压型变换器经过直流母线连接起来,直流母线中间安装直流电容器,实现先整流后逆变的整个过程。
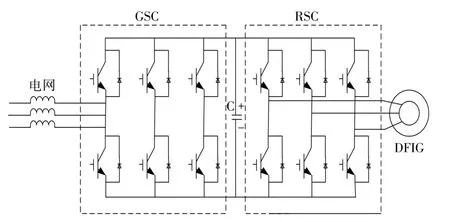
图3 两电平电压型双PWM变换器Fig.3 Two-level voltage type dual PWM converter
2 双馈异步风机的数学模型
双馈异步风机系统是典型的强耦合、多输入多输出的非线性系统。根据文献[7]~[9],双馈异步风机的高阶非线性数学模型主要包括三阶、五阶和八阶。其中,三阶次的数学模型包含转子的模型和简化后的传动系统模型,具有最短的仿真时间,并且能得到较好的动态响应结果。
本文基于如图4所示的DFIG等效电路,建立其三阶非线性数学模型,满足研究双馈异步风机低电压穿越的要求。根据DFIG的等效电路图,可以得到其三阶状态空间表达式。
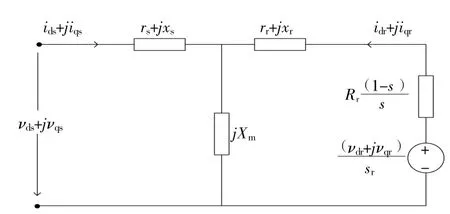
图4 双馈异步风机的等效电路图Fig.4 The equivalent circuit diagram of doubly-fed induction generator
系统状态方程组:
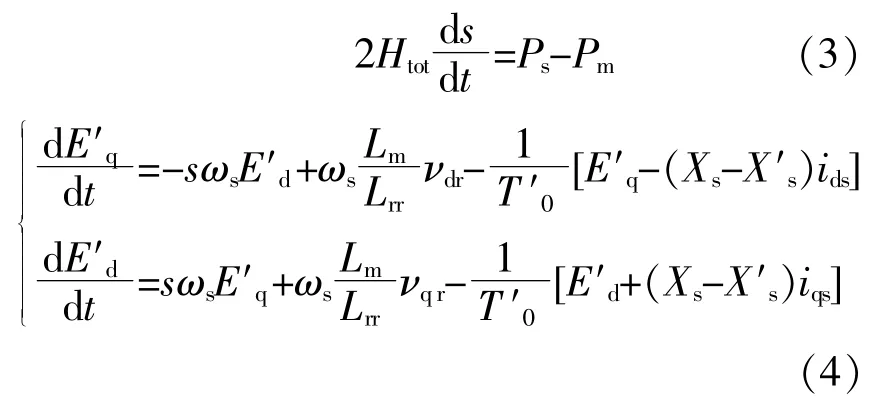
输出方程组:

电压平衡方程组:
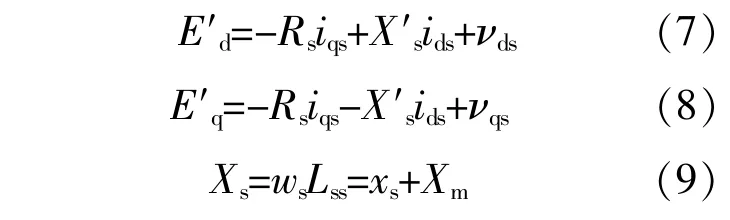
式 中:Htot为 等 惯 性 时 间 常 数;Ps,Qs为 定 子 有 功、无功功率;Pm为风机输出的机械功率;s为转差率;ωs为 同 步 转 速;E′d,E′q为 内 电 势 的dq轴 分量;Lm为 互 电 感;Lrr,Lss分 别 为 转 子、定 子 互 电 感;T′0为 暂 态 开 路 时 间 常 数;νdr,νqr为 转 子 电 压dq轴 分 量;ids,iqs分 别 为 定 子 电 流dq轴 分 量;Xs,X′s为开路阻抗和暂态阻抗;Rs,Rr为定子、转子电阻。
3 IVCC控制器设计
现有FMAC控制策略的显著特征是通过调节内电势矢量实现对输出有功、无功(电压)的控制,而内电势矢量(幅值、相角)与其dq轴分量直接相关。由此可通过调节内电势dq轴分量,控制双馈风机输出有功、无功,结合矢量定向技术,可实现有功、无功解耦控制。
如图5所示,本文提出的双馈风机IVCC控制器包括两个串级控制回路,即电压回路和功率回路。分别由自动电压调节器(Automatic Voltage Regulator,AVR)、功率调节器、功角补偿器和dq内电势调节器组成。
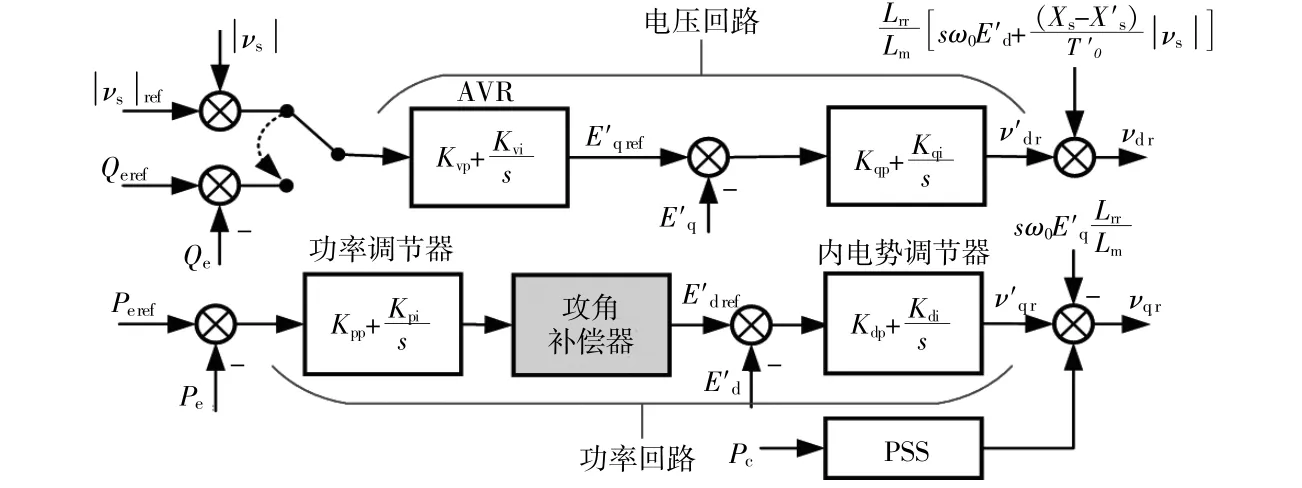
图5 双馈风机IVCC控制器结构图Fig.5 The structure diagram of IVCC controller for doubly-fed wind turbine
3.1 电压、功率控制回路设计
根 据 式(5),(6)所 定 义 的 输 出 方 程 组 可 知,有功、无功解耦控制可通过定子电流定向实现,即:

由此得到:
将式(12)代入其状态方程得:
式(13)~(16)表 明,双 馈 风 机 输 出 有 功Ps与正比,而通过调节 νqr实现控制;输出无功Qs与成正比,可通过调节 νdr实现控制。
令:


式(15),(16)可 写 为
式(19),(20)表 明,E′d,E′q通 过 一 对PI控 制器即可实现较为理想的跟踪控制效果,其参数可根据如下传递函数模型整定:

3.2 功角补偿器设计
FMAC控制仅能在dq旋转坐标系或极坐标系中对控制角进行有效控制,难以实现对功角的完全控制,导致故障中端电压跌落较大,影响其低电压穿越能力。为实现故障中对功角的完全控制,在功率回路中加入功角补偿器[10],[11]。如图6所示,功角补偿器包括功角补偿回路和故障检测回路。其中,当端电压幅值低于预先设定的阈值 α时,即认为处于故障状态,输出为补偿后值,否则为功率调节器输出。
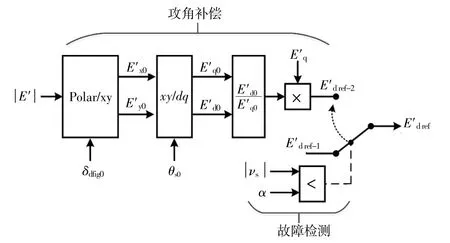
图6 双馈风机功角补偿器Fig.6 The angle compensator of doubly-fed wind turbine
功角补偿回路通过固定故障前功角和位置角值,经极坐标到x-y坐标系或x-y到d-q坐标系的坐标变换,得到在d-q坐标系表征功角和位置角 的 内 电 势dq轴 期 望 值E′d0,E′q0。为 实 现 故 障 中端电压和功角的解耦控制,本文在功率控制回路中加入功角补偿器,得到故障中内电势d轴设定值。

通过以上分析可知,本文所提出的IVCC控制策略可根据双馈风机所处工况 (故障工况或正常工况)实现有功、电压、功角的完全解耦控制,从而有效地增强了双馈异步风机的低电压穿越能力,改善了电网发生相应故障后其端电压的恢复能力。
4 仿真及结果分析
4.1 多机电力系统的模型结构
为了验证IVCC控制策略在实际电网系统中的有效性,本文搭建了如图7所示的多机电力系统(Multi-Machine Power System,MMPS)模 型,在双馈风力发电机连接的Simulink环境下进行仿真。系统中,无穷大电力系统是容量为1000MW的同步发电机组,输电线路长度50km;SG2为包含汽轮机和同步发电机的传统火电机组,运行于PV模式;WF1为传统风电机组,运行于PQ模式;WF2为双馈风电机组,运行于PV模式;SG2,WF1和WF2共同组成本地电力系统;母线B5,B6为远方负荷中心,二者之间通过长度为240km的输电线路L56连接。
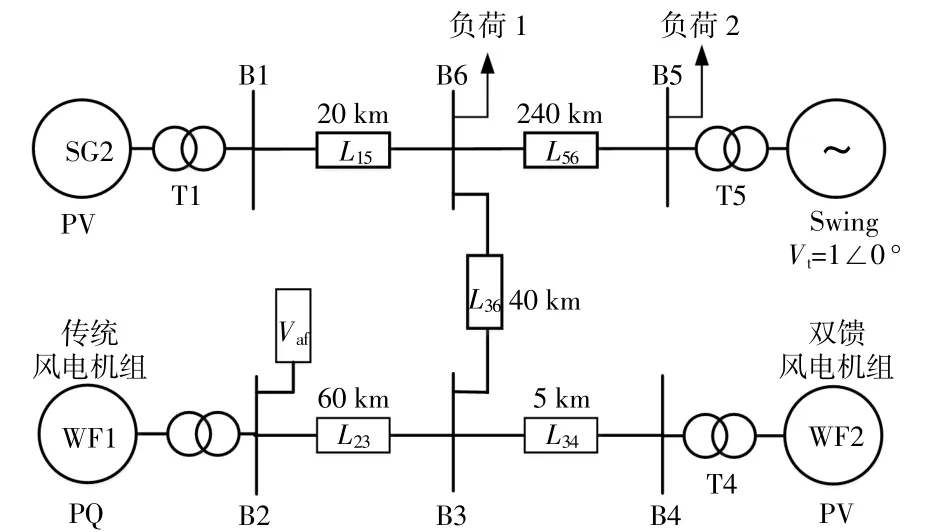
图7 多机电力系统仿真模型Fig.7 Multi machine power system simulation model
4.2 MMPS系统DFIG故障穿越能力研究
为验证双馈风机安装IVCC控制器的故障穿越能力,本文在图7所示多机电力系统的线路L34中施加持续时间为0.2s的3项接地故障。仿真中,WF2分别安装FMAC,LQRC和IVCC控制器,故障接地电阻从10Ω开始以0.1Ω的步长递减,直到安装某种控制器的WF2率先跳闸,其响应曲线如图8所示。图8中,虚线为FMAC,点划线为LQRC,实 线 为IVCC。
由WF2故障端电压曲线(WF2-|Vs|)可知,由于FMAC不具备功角完全控制能力,其端电压跌落值高于LQRC和IVCC,导致安装FMAC控制器的WF2因端电压过低保护动作跳闸。WF2跳闸后,电网远端失去重要的端电压调节电源,直接导致WF1端电压快速跌落(WF1-|Vs|),并最终因端电压低保护动作而跳闸。由于WF1在运行时从电网中吸收大量的无功,跳闸后由WF1,WF2和SG2组成的局部电网无功过剩,导致各母线电压过高(图8中|Vs|曲线),极易触发其他并网风电机组高电压保护动作。
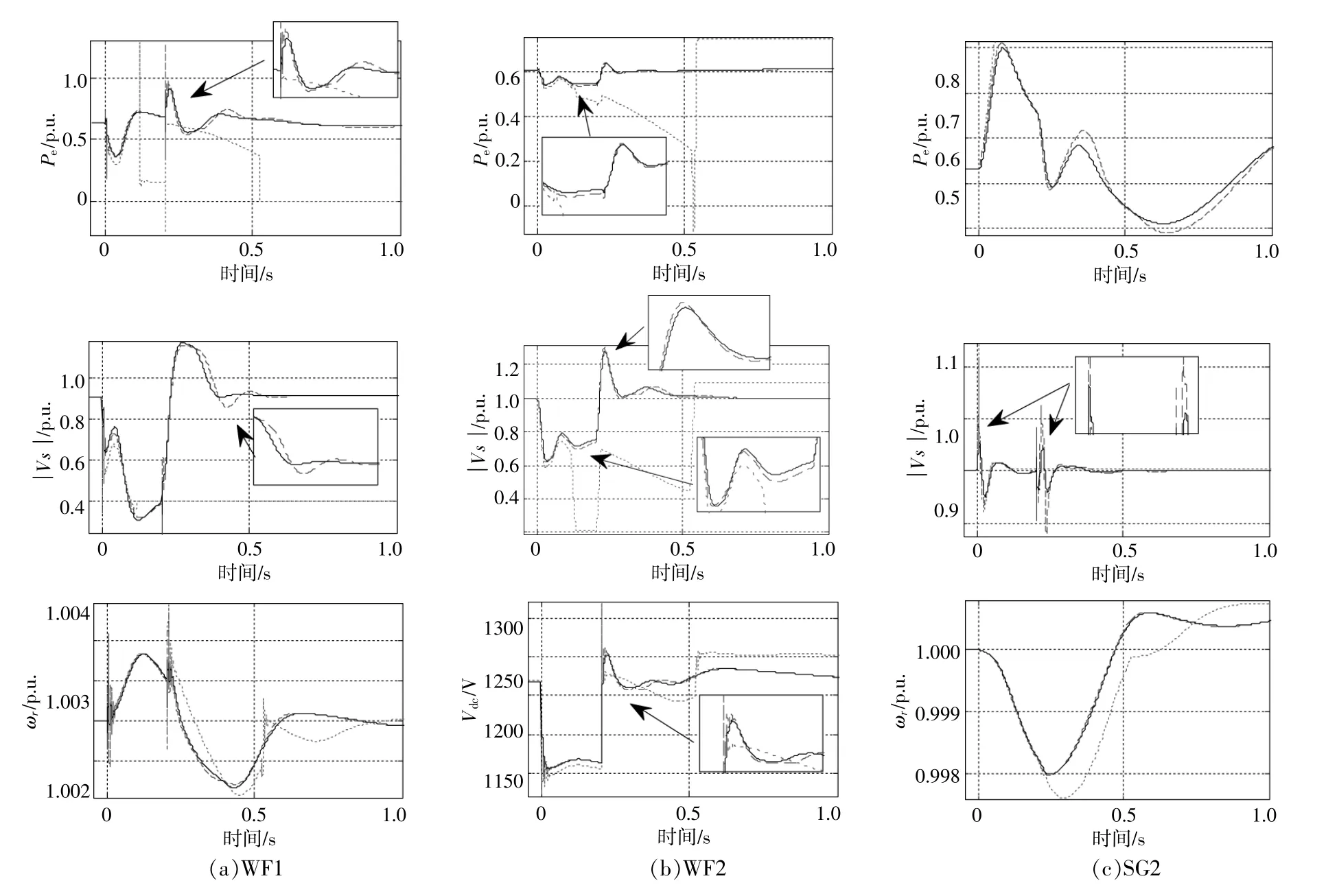
图8 多机电力系统DFIG次同步工况FRT(s=0.02)Fig.8 Multi-machine power system DFIG subsynchronous working condition FRT(s=0.02)
在故障发生的短时间内,局部电网瞬时失去大量有功功率,造成SG2转速由1p.u.迅速下降到0.9978p.u.(SG2-ωr),严 重 影 响 电 力 系 统 安 全稳定运行。LQRC和IVCC具有完全功角跳变抑制能力,在故障中其端电压跌落值较小,避免触发WF2低电压保护动作。因此,安装LQRC控制器和IVCC控制器的双馈风机可在故障中对电网提供持续的支持,使得WF1端电压维持在允许范围内,避免了大规模风电脱网事故的发生,保证了系统的频率稳定性。
与LQRC相比,IVCC端电压故障中跌落值和故障后超调量均较小 (WF2-|Vs|中放大部分),表现出了较好的端电压恢复能力和调节效果。SG2和WF1端电压曲线和有功曲线表明,IVCC对电网的支持能力优于LQRC。SG2和WF1端电压曲线和有功曲线表明,IVCC对电网的支持能力略优于FMAC。
5 结论
本文针对双馈异步风机非线性低电压穿越的热点问题,在传统的电流控制模式和磁链幅值相角控制基础上,结合两种方法的优势提出一种新型的内电势串级比例积分控制的方法。通过调节内电势dq轴分量,实现双馈风机输出有功和端电压调节。本文所提出的IVCC控制不须经过极坐标系到dq坐标系的变换,减少了引入耦合的环节,进一步地改善了双馈风机动态特性。
为实现故障中对双馈风机功角的完全控制,基于转子侧、定子侧动态特性分析,在风机功率控制回路中加入了功角补偿器。故障模拟仿真显示,功率控制回路通过阈值判断自动切换为功角控制回路,从而实现了有功、电压和功角的完全解耦控制,限制了故障中双馈风机的功角突变,降低了故障中电压跌落值,提高了双馈风机故障穿越能力。