气象探测无人机及保护装置结构设计
2022-09-09李俊杰霍宗钰
李俊杰 霍宗钰
(1.广东东软学院 广东省佛山市 528225 2.广东常用科技有限公司 广东省佛山市 528225)
1 云雨粒子探测背景
随着全球气候变暖,气候带来的灾害逐渐增多而如今的发展情况下,现在的无人机虽然一直在改造升级,但安全层面上仍然存在瑕疵,显得不够完善。比如现在的云雨探测无人机飞行区域受限,续航时间短,难以高效地完成工作任务,其中还存在着安全隐患,因无人机以及仪器保护装置的落后从而导致无人机事故众多,许多昂贵仪器因此损坏也甚是可惜。所以无人机仪器保护装置是无人机十分重要的一环,也是我国无人机发展应用最重要的一环,关系到人们的安全和昂贵经费的消耗。
气象探测离不开对云雨粒子微物理特征的研究,在环境、大气科学领域其属于其中一个焦点。云雨粒子的相态(云相态是指云顶粒子的热力学相态,利用卫星遥感中的不同波段,可以对云相态进行识别)、形状、含水量、粒径分布以及粒子数浓度等参数对科学家研究预测此区域的天气状况、雨水从什么海洋飘过来、生活环境对天气的影响、雨水引起的气候变化、气候对载人机空中飞行安全的因素等众多领域都有着不同程度的影响,对云雨粒子准确测量的关键是为了能够从云降雨的物理过程中获取。科学家研究云雨粒子的微物理特征从无到有已经开发了多种遥感技术并在实践中应用,可以通过地面接发基站和天空接发基站的遥感仪器通过反演得到空气中云雨粒子的微物理参数,不过在此过程需要搭建云雨水粒子它们之间相互产生的特性的假设,但是这种性质的假设是需要分析现场测量结果得到的。所以通过机载(目前技术大多以热气球升空搭载)云雨粒子现场测量设备通常被认为可以较为准确地获取云和雨粒子的微物理特性,目前已被广泛地应用在云雨物理、人工影响天气研究和卫星、雷达等设备遥感结果的验证中。
本研究搭载的是水凝物视频探空仪(Hydrometeor Videosonde,HYVIS),这款探测器是属于碰撞取样方式,其是一种利用胶片和涂层形成的采样面收集由粒子之间碰撞产生的印痕,并进一步进行人工或自动处理得到粒子形状、直径和尺度谱信息的球载云降水粒子测量仪器。在飞行过程中直接对粒子印痕拍照回传处理。水凝物视频探空仪内含显微相机以及精密相机2个摄影机,其中显微相机的视场为0.9mm×1.2mm,用于拍摄粒径小于300μm的小粒子;精密相机的视场为5.25mm×7mm,用于拍摄粒径大于300μm的大粒子。
将连接GPS无线探空仪的HYVIS用无人机飞向天空,捕获大气中直径数十至数百微米的粒子。将捕获的粒子附着在胶片上,用两种相机(显微镜和特写)交替拍摄,然后作为视频信号发送到地面站。通过拍摄的图像,可以计算附着粒子的形状,大小,数量和粒子的数量密度。HYVIS的直接观测用于观测积雨云和台风,极化雷达辨别和评估降水粒子,云分辨率数值模拟和火山灰监测。
传统探测方式采用热气球挂载HYVIS探空仪自由上升至云层进行云雨粒子的采集,随后待热气球燃料耗尽后自由飘落。由于热气球会随着风的因素随意飘动,仪器降落的位置是未知的,容易给地面人员带来安全隐患,在落地后的回收也往往非常艰难,并且容易出现仪器下落途中造成损坏。现代探测方式采用无人机搭载HYVIS探空仪垂直上升至收集区域后便返回地面,能精准、快速以及安全的回到地面,高效的完成工作任务。
2 无人机结构设计
2.1 设计要求
无人机需具备以下条件:
(1)飞行风力:6级风-7级风;
(2)飞行速度:4-5m/s;
(3)仪器重量:1600g;
(4)飞行升限:1000m;
(5)飞行半径:250m;
(6)飞行方式:垂直上升;
(7)飞行时长:30min;
(8)起降区域:具有不小于50m乘50m平整无杂物地面;
(9)垂直速度:>3m/s。
无人机结构布局如图1所示。整机布局以不倒翁架构,设计的电池仓在无人机底部的正下方,提供重心在下,使无人机在遇到特殊情况下也不会倾斜翻转从而保护仪器。将云雨粒子探空仪放置在无人机的顶板上的仪器保护仓内,再盖上仪器保护仓盖,盖上设计有云雨粒子的收集口。仪器保护仓的四周设有气垫缓冲装置,给仪器的安全提供多一层保障。仪器保护仓与机身本体之间采用快拆结构相连,方便仪器的拆装替换。
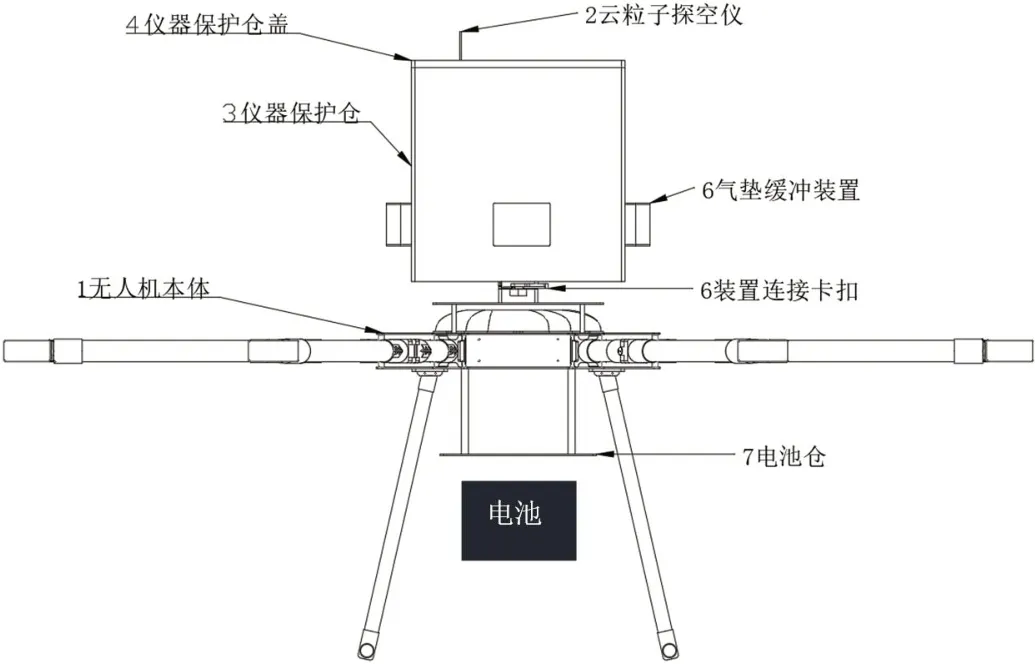
图1:无人机结构布局图
2.2 总体结构
多旋翼无人机系统分别是由机架、动力系统和指挥控制系统三部分组成,其中机架包括机身、机臂和起落架;其次动力系统包括电机、电调、电源和螺旋桨;最后指挥控制系统包括遥控器、接收机、GPS、飞控、电台部分多旋翼无人机还有地面站。
2.3 机架设计
从古至今,学会运用巧妙的结构设计会提高其可靠性。多旋翼无人机的结构设计也不例外。根据无人机自身需要的动力系统装置的选型以及搭载的仪器的重量配置位来设计。多旋翼无人机在各类零件的尺寸设计方面有着密切的关系,影响着整体的性能。大致有:机架、机臂、螺旋桨等尺寸。如果把机臂的夹角用符号θ来表示,常见的四旋翼无人机对应的角度θ=90°;而常规结构的六旋翼对应θ=60°。从图2得知,设机臂数为n,则θ=360°/n,此时机架半径R与旋翼最大半径r存在如下关系:
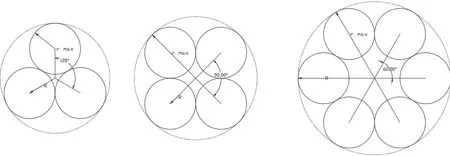
图2:Y6六旋翼、传统四旋翼、传统六旋翼无人机结构示意图
R=r/sinθ/2=r/sin180°/n
2.3.1 机身与起落架
机身是承载无人机所有设备的一个平台。其实用性、稳定性和续航能力都与机身的设计有关。所以需要在设计无人机前,选定无人机机身的材料、尺寸、重量和强度等条件尤为重要。而起落架则是无人机在起降时重要的一个支柱,其可以保持无人机的水平平衡;还可以在无人机接触地面时起到缓冲保护作用。
机身选用碳纤维板材,虽然其造价昂贵,但是提供的动力效率高,并且碳纤维材质密度小、强度高,符合设计的无人机要求。为了使无人机能提供更大的载重能力,因此需要无人机本身的重量有所控制,起落架同样采用碳纤维材料的管子,强度和硬度都比大部分材料都好。
2.3.2 布局设计
无人机一般的布局设计是含有三个条件。首先是机架自身整体形状;其次是与至接触面平滑度;最后是零部件与机身等结构的协调分布合理性。
机身布局:
(1)常规(交叉)结构。以多旋翼中的四旋翼为例子,常规的结构布局就是以中心点为整体,四个旋翼为直接动力源,其中电机螺旋桨安装在机臂的最尾部,延伸的机架相互交叉与中心点,机身中间的位置负责安置飞控、接收机、电源供电模块以及一些其他外部设备。四旋翼按机头与机架之间形成夹角的关系可分为X型结构以及+型结构(如图3所示)。X型比+型的设计具有更高的操作机动性。因为X型是以逆时针算俯视无人机右上为第一机臂,安装逆时针电机(CCW),左上则为第二机臂,安装顺时针电机(CW),逆时针以此类推,因此此结构有更多的旋翼进行俯仰角控制和姿态控制,可进行手动、姿态、GPS模式操作,是目前无人机中最为常见的设计,可以有效减少机臂以及旋翼对云台视野的遮挡。
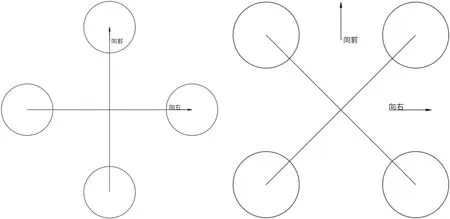
图3:+型、X型布局
(2)环形布局。环形布局的多旋翼无人机基本外形与上述X型结构布局相类似。环形布局多旋翼的机架组合成一个整体,与传统的X型机架相比,其刚性更大,并且有助于降低无人机飞行时电机与螺旋桨之间产生的振动。但作为代价,环形布局的设计会增加整体机身体积以及重量,在一定程度上影响了多旋翼无人机机动性高这一优点。
气动布局:
对布局进行空气动力学设计的目的主要是为了降低飞行时机身的阻力。我们可以通过阻力公式:
D=1/2*ρ*V*S*C
得出无人机飞行时受阻的因素,其中有空气密度、空速、接触面积以及升力。由此可以把阻力分为无人机接触面的摩擦阻力、无人机飞行时的压差阻力、无人机提供升力而产生的诱导阻力和零部件之间的干扰阻力。
(1)摩擦阻力。多旋翼无人机在飞行过程中机身与大气的接触面称为附面层,摩擦阻力在其上与飞行方向呈反向。粘性越大的空气流过无人机时对飞行影响越大,无人机的表面粗糙程度越大或无人机与空气接触的表面积越大,则摩擦阻力越大。
(2)压差阻力。多旋翼无人机飞行时机身前后压强差形成的阻力。这一阻力主要是受空气流过物体时与其接触的迎风面积的大小有关,若迎风面积越大,则所受的压差阻力也越大。无人机的外形结构也对压差阻力也有很大影响,虽然它们的最大迎风面积是相同,但是它们所受的阻力却是相差很大,其中圆盘所受的压差阻力是最大的,球形是次之,而流线体的最小(只有圆盘所受压差阻力的1/20)。
(3)诱导阻力。伴随升力而产生的阻力。多旋翼高速前飞时机身能产生升力,就会产生诱导阻力。
(4)干扰阻力。飞机的各个部件组合在一起所产生的阻力并不等于单独置于气流中所产生的阻力总和,其中额外的阻力就是干扰阻力。我们为了减少干扰阻力,往往需要细致分析考虑和安排各个部件之间的相对位置,与此同时尽量使各个部件直接的连接处尽量以圆滑结构过渡,便于降低非必要的阻力。对于需要高速前飞者远距离巡航飞行的多旋翼,从设计无人机结构的气动布局来降低飞行中的阻力提升飞行效率是一大关键。结构气动布局设计时需要考虑多旋翼无人机在前飞时的倾角,减少最大迎风面积,并保证机身设计的流线型,还不能忽略在机身中各部件之间的布局,在安置合理性的同时连接处要圆滑的结构过渡,避免每一处零件带来的阻力,在机身硬度要求合适的前提下保证表面的光滑程度。更进一步,可以通过CFD(Computational Fluid Dynamics,计算流体动力学)仿真计算阻力系数,不断优化外形设计,以期获得满意的多旋翼飞行性能。
3 基于探空仪的安全装置结构设计
3.1 仪器保护仓设计
图4为仪器保护仓,用于保护云雨粒子探测器,安装飞机顶部,对于该仪器我们在使用过程中只将探测部分露出其他区域均有海绵包裹,防止炸机、轻微侧翻给仪器造成的伤害,减少损失。仓体结构根据无人机重心设计,以最小的体积放下多种探测仪器,内部可以根据不同的内衬设计进行不同仪器的安装,多功能型更合适不同环境运用不同仪器设备。

图4:仪器保护仓
3.1.1 内部构造
由于仪器作业过程中与无人机一同会受到振动,在仪器仓内部设计采用EVA泡棉(图5)材料做内衬对振动带来的影响进行缓冲。

图5:Eva泡棉
3.1.2 外部构造
保护仓外部通常会受到沙石等意外情况的磨损,综合分析外部应当使用ABS硬塑料来制作。ABS塑料称为工程塑料,其是由丙烯腈、丁二烯、苯乙烯组成的三元共聚物,于EVA泡棉类似都是具有耐腐蚀、耐高温、高弹性、高韧性等优点。ABS之所以被称为工程塑料是源于在汽车飞机等众多机械行业都得到广泛应用,坚硬的特性使其遍布各行各业的产品当中。在安全性能方面考虑在遇到危险情况下,坚硬的外壳以及其高强度的韧性能提供一定的缓冲能力,即使外部受损内部也能把损伤降到最低。
3.2 气垫缓冲装置设计
图6为仪器保护仓与气垫缓冲装置,用于保护云雨粒子探测器,使用定制连接快拆卡扣与飞机顶部固定,对于该仪器我们在使用过程中只将探测部分露出,仪器仓四周安装气垫缓冲装置在遇到紧急情况时感应器检测到加速度过大,倾斜角超过90°就会打开气垫,防止一切因素给仪器造成的损害。

图6:仪器保护仓与气垫缓冲装置
3.2.1 结构设计
仪器保护仓外部安装气垫缓冲装置,同样由ABS材料制作的外壳,位置安装在仓体侧面,盒体中心位于保护仓底部重心的外部中心。
3.2.2 电路设计
气垫控制器通过接收倾斜角传感器以及加速度计传感器提供的信号进行紧急启动,地面操作人员也可以通过无线模块发射信号到接收器上进行手动启动。
信号传输示意图如图7所示。
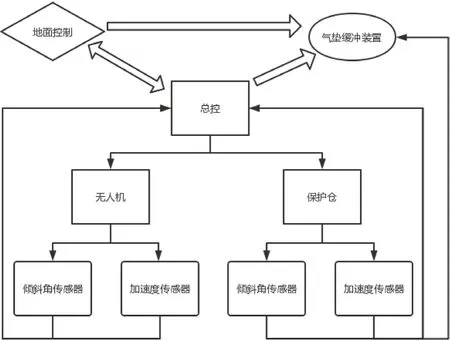
图7:信号传输示意图
气象无人机在正常作业期间,当无人机的倾斜角传感器或加速度传感器检测到异常状况下反馈给总控,总控对气垫缓冲装置传输信号使其启动保护,同时给地面控制传输信号并提示异常情况;保护仓设有独立的传感器,任意传感器检测到异常后会同时传输信号至气垫缓冲装置及总控,避免当总控发生异常情况下也能启动保护装置。地面控制端可根据人为判断独立控制气垫缓冲装置的启动。
4 快拆装置结构设计
快拆结构设计根据仪器实际的使用需求能快速对作业完成后的设备进行替换。底座与无人机连接,连接板与保护仓连接,通过配合位置进行快拆安装实现。如图8所示。
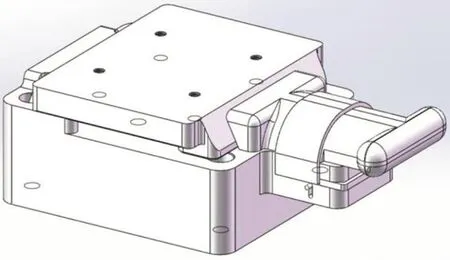
图8:快拆结构示意图(关闭)
5 总结
本设计根据当前气象探测现状与工作环境等因素结合进行分析,设计出满足需求的气象探测无人机,针对实际工作环境可能出现的异常问题进行逐一改进,通过多次模拟实验进行验证可行性,实验出现的情况进行记录与完善设计。最终实现高效且安全的气象探测无人机作业。
