未来无人驾驶汽车的传感器方案发展趋势(下)
2022-09-09安徽程增木
◆文/安徽 程增木
二、搭载激光雷达等传感器套件的车型分析
1.小鹏G9(计划交付时间:2022年下半年)
小鹏G9感知设备分布如图5所示。其传感器由2个激光雷达、5个毫米波雷达、12个摄像头、12个超声波雷达组成。

①激光雷达性能参数
激光雷达性能参数(速腾聚创RS-LiDAR-M1)如表2所示。

②摄像头布置
3个前视摄像头(1个800万像素双目和1个长焦单目),4个前风挡侧视摄像头(290万像素),2个侧前视摄像头(分布在左右后视镜底座),2个侧后视摄像头(分布在左右翼子板),1个后视摄像头。小鹏摄像头这样的布置可以覆盖360°的感知范围,满足小鹏G9长车身的要求。
小鹏自研的XPILOT 4.0系统具备全场景智能驾驶能力,包括城市NGP(类TJA)、高速NGP(类HWP)、记忆泊车能力VPA(类APA),属于L2.5-L3级自动驾驶功能。
2.长城沙龙-机甲龙(计划交付时间:2022年7月底)
传感器解决方案:4个激光雷达、5个毫米波雷达、11个摄像头、12个超声波雷达。
①激光雷达性能参数
激光雷达性能参数(华为96线激光雷达),如表3所示。

车辆有效检测距离超过200m,行人有效检测距离超过150m。保险杠处两个激光雷达,分布在左右(图6);车头拍照下方安装1个(图7);车尾保险杠正下方1个(图8)。



②摄像头参数见表4。

机甲龙目前主要可以实现三种功能:
①智能领航:城市场景可做到环岛出口、警车和消防车等特殊车辆、小动物、手推车等识别及处理,支持红绿灯自动启停、自动变道、超车等功能;高速场景可做到自动通过收费站、障碍物和施工区的识别及避让、故障后自动行驶到安全区等功能。
②智能泊车:跨楼层的PAVP自主泊车+有固定车位的HAVP记忆泊车、遥控泊车+APA融合自动泊车。
③智能互联:基于5G-V2X实现特殊车型交互礼让、前方异常车辆交互预警、盲区变道交互预警、弱势交通参与者交互预警、道路危险情况交互预警。
3.合众-哪吒S(计划交付时间:2022年年底)
传感器解决方案:3个激光雷达、5个毫米波雷达、13个摄像头、12个超声波雷达。
激光雷达性能参数(华为96线中长距混合固态激光雷达),如表5所示。
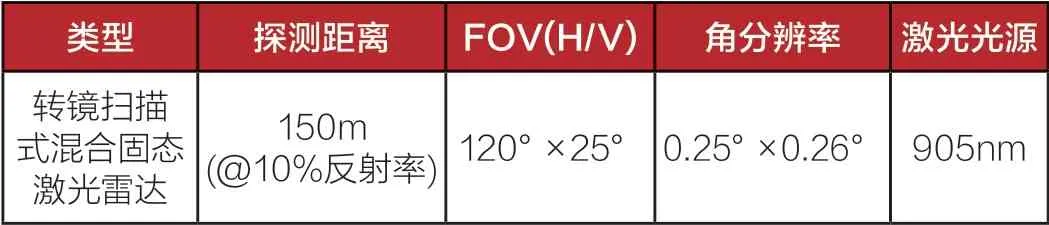
车辆有效检测距离超过200m,行人有效检测距离超过150m,激光雷达布局如图9所示。

主要功能:高速及城市道路实现领航辅助驾驶以及在泊车、远程召唤等部分自动驾驶功能。
应用场景:高速场景、低速场景、城市场景。
4.上汽-飞凡R7(计划交付时间:2022年下半年)
传感器解决方案:1个激光雷达、2个4D成像毫米波雷达、6个3D毫米波雷达、12个摄像头、12个超声波雷达。
①激光雷达性能参数(Luminar Iris)
激光雷达性能参数(Luminar Iris)如表6所示。车顶上方布置了激光雷达(图10)。


②4D成像雷达:采埃孚- PREMIUM
4D成像雷达:采埃孚- PREMIUM参数如表7所示。

发射/接收通道数:192通道,每个测量周期内提供数千个数据点。能够精确识别较小物体和静态物体:据测试使用该技术的车辆可探测到140m远处的可乐罐,道路边界检测以及自由空间测量。
③摄像头布置
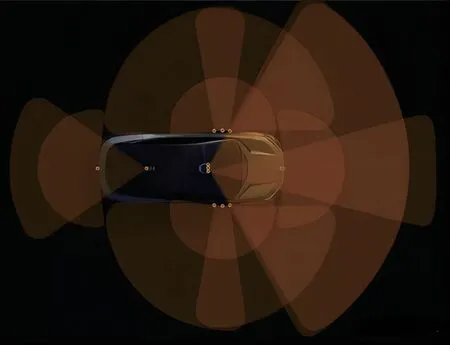
3个前视摄像头(1个双目和1个长焦单目);4个环视摄像头(车辆前侧1个、车辆左右侧各1个,后方1个):2个侧前视摄像头(外后视镜),2个侧后视摄像头(翼子板),1个后视摄像头(位于车尾)。系统的传感器感知视场角如图11所示。
①自动驾驶功能:基于R-TECH技术平台自主研发的PPCEM全栈自研高阶智驾方案,具备六重融合式感知体系与超级大脑双重特性,以官方公布信息可发现,该自动驾驶方案可实现:全天候、全场景。
②应用场景:结合车辆目前已知的配置情况来看,已配置激光雷达、4D成像雷达等多多种异构传感器的融合感知方案,并加持英伟达Drive Orin的高算力计算平台后,可以预测R7可以实现:高速路、城区以及代客泊车三大场景。
三、车型方案对比
通过对比各家的传感器方案及实现的功能,我们可以发现:
(1)四家厂商均可满足城市和高速公路智能驾驶的功能要求(L3的智能驾驶功能要求),智能泊车(L4智能驾驶功能要求)。在功能的细分领域,哪吒S支持远程召唤(该功能为L4智能驾驶功能),其自动驾驶的功能更为先进一些。
(2)上述厂家都使用了“多激光雷达+多高清摄像头+毫米波雷达”的方案,可以后续冗余升级L4功能而无需更换传感器套件。
(3)就传感器成本而言,机甲龙使用了4颗激光雷达,飞凡R7使用了4D毫米波雷达,其成本相对比小鹏G9和哪吒S高,这也和各家车身结构及感知算法模块的不同相关。
四、总结与展望
1.对于感知系统来说,“摄像头+毫米波雷达+激光雷达”已成为自动驾驶车辆的主流方案。4D毫米波雷达在原有距离、方位、速度的基础上增加了对目标的高度维数据解析,能够实现距“3D+速度”四个维度的信息感知,可以有效地解析目标的轮廓、类别、行为,可以解决传统毫米波雷达的短板。具有规模应用的潜力。
2.从笔者的角度来看,实现L4自动驾驶功能,需要使用至少1颗激光雷达、12颗摄像头、5颗3D毫米波雷达(或4颗以上4D毫米波雷达)、12颗超声波雷达才可以完成基本功能要求,同时算法也需要进行大量优化。此举可能与后续车厂实现L3-L4自动驾驶功能升级硬件冗余相关,即车辆在设计阶段即满足L4的自动驾驶功能的传感器硬件需求,可根据市场、政策等因素对自动驾驶功能等级进行升/降级。
3.800万像素摄像头大规模装车及应用。目前主流的OEM都装载了800万像素的摄像头作为感知方案,一方面出于原始图像感知效果的考虑,另一方面其他OEM都已搭载800万像素摄像头,摄像头搭载也开始呈现“内卷”化。
4.高速、城市、泊车三大场景已成为自动驾驶车辆功能落地的三大发展方向。对于这几个场景及功能各厂家和供应商如何做好功能安全及功能稳定是一个巨大的挑战。