直流接触器电磁机构的参数优化及仿真
2022-09-08游一民桑仲庆
赵 彤,游一民,桑仲庆
(厦门理工学院电气工程与自动化学院,福建 厦门361024)
直流接触器作为新能源汽车控制分断与保护的重要部件,在大功率、高电压领域具有广阔的应用前景[1]。电磁机构作为接触器重要的动力部分,利用电流在线圈中产生磁场,配合电磁吸力与弹簧反力特性来控制大电流主回路的通断。通过电磁机构的静态特性可以判断不同激磁电压或电流下,衔铁能否可靠地吸合,但无法反映电磁系统的磁路参数、机械特性等随衔铁运动的变化过程[2]。关于接触器电磁机构运动特性的研究已经开展数年,其中很大一部分都是基于交流接触器动态特性进行仿真与优化[3-6],而对直流接触器电磁机构的研究相对较少,且国内学者在研究直流电磁机构的动态特性[7-10]时,常采用单目标因素分析仿真结果,很少根据综合因素实现结构与功耗的优化。利用综合目标因素分析方法不仅可以提出代表性强、制造条件优的方案,还可以获得零部件尺寸最优值。因此,本文针对直流接触器小型化、低功耗及高可靠性要求,采用Maxwell仿真软件对直流接触器电磁机构进行建模与仿真,通过正交试验法获取多因素优化参数组合,提高电磁机构的动作性能。
1 电磁机构模型的建立
1.1 工作原理与数学模型
某型号直流接触器电磁机构包含线圈组件、磁轭、铁芯组件和弹簧等。合闸过程中对激磁线圈施加激励,线圈得电后在磁轭、铁芯组件及气隙中形成磁回路,线圈骨架中心产生向上的磁通,牵引衔铁向静铁芯运动,基于衔铁行程变化,弹簧表现出不同的反力特性,衔铁走完开距与超程后维持吸合,合闸结束;分闸时断开激励源,由于二极管的续流作用,线圈电流与磁路磁通逐渐减小,电磁吸力无法克服弹簧反力维持衔铁吸合,衔铁失电复位,分闸过程结束。直流接触器电磁机构结构图如图1所示。

图1 直流接触器电磁机构结构图Fig.1 DC contactor electromagnetic mechanism
直流电磁机构由于线圈产生的磁通方向不变,衔铁动作时无需考虑磁滞与涡流损耗,动作过程满足电压平衡方程与达朗贝尔运动方程[11-12],即:
(1)

(2)
(3)
式(1)~(3)中:u(t)为线圈的励磁电压;i(t)为线圈上流过的电流;R为线圈电阻阻值;Ψ(t)为线圈磁链;Fx为运动衔铁所受的电磁吸力;衔铁所受反力通常包含弹簧载荷Ff,运动部件重力G1,以及空气阻力与内壁摩擦力的合力f2,衔铁反作用力与电磁吸力方向相反,企图使衔铁打开;v(t)为衔铁在不同时刻t的速度;m为衔铁的质量;s(t)为衔铁随时间变化的行程距离。
Maxwell仿真软件采用T-Ω算法对三维瞬态场进行分析,基于局部剖分法计算三维瞬态运动效应[13],由麦克斯韦方程组给出的低频瞬态电磁场方程[14]如下:
(4)
式(4)中:E为电场强度;B为磁感应强度;H为磁场强度。
实际工程中,需考虑回路主磁通与气隙漏磁通,计及端面和螺管电磁力,同时,保证一定的设计余量,以满足机构吸反力配合特性,修正后的麦克斯韦电磁吸力计算式如下:
(5)
式(5)中:Bδ为工作气隙磁密;Sδ为衔铁的截面积;μ0为气隙磁导率;机构空腔填充空气,μ0=4π×10-7H·m-1;k为螺管力系数,取值范围为0.3~0.6。
1.2 仿真模型
仿真模型由动静铁芯、线圈及磁轭构成。模型前处理时删去样机螺纹,降低网格剖分复杂度,剔除用于导向与固定的非导磁材料。剖分网格时,加密运动域与运动组件,忽略涡流损耗、磁滞损耗和趋肤深度影响,直接基于内部尺寸完成划分。简化后的直流接触器仿真模型与网格剖分情况如图2所示。
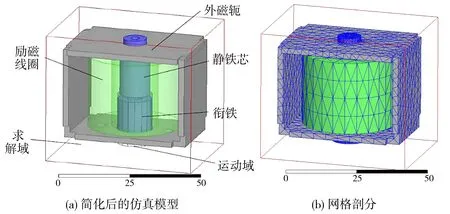
图2 直流接触器电磁机构仿真模型与网格剖分(单位:mm)Fig.2 Simulation model and mesh splitting of DC Contactor(unit:mm)
材料设置方面,衔铁、静铁芯及上下磁轭均采用能快速响应外磁场变化的软磁材料DT4C;线圈材料为铜,空腔部分由空气进行填充。由于直流接触器不存在过零点,开距的大小在一定程度上影响触头的灭弧能力。实际设计中还要考虑超程的设置,防止因触头磨损造成的吸合不可靠。综合考虑衔铁总行程为1.6 mm,其中开距1.4 mm,超程0.2 mm。
本接触器采用多级弹簧负载特性,其载荷由分闸弹簧和合闸弹簧2部分组成。按衔铁动作情况可以划分为3个阶段:衔铁触动前分闸弹簧预压力Ff0,触动后分闸簧压缩作用力Ff1,以及超行程阶段触头簧与分闸簧共同作用力Ff2,弹簧反力特性曲线如图3所示。运动域设置时,需考虑衔铁动作与维持过程中的摩擦阻尼系数,主要包含衔铁运动与吸持时与内壁之间的阻力。

图3 弹簧反力特性曲线Fig.3 Spring reaction characteristics curve
仿真模型采用18 V可变直流电源励磁,基于二分法确定最小维持电压。图4为线圈控制电路结构。当衔铁保持稳定吸合时,降低激励源电压进而减少线圈电流,只须保证吸力特性超过反力特性,衔铁即可维持稳定吸合。此外,凭借二极管D1的续流作用,降低回路断开瞬间的过电压,提高可靠性。开关管采用电平驱动的方式,通过调节驱动电压的占空比控制主回路的导通时间。随着衔铁运动到位并稳定吸持后,将直流电源从18 V调至8 V,减少衔铁长期吸合过程中线圈的功耗,降低线圈温升。仿真时可利用外电路编辑器(circuit editor)中的压控开关模块控制主电路的通断,同时调节脉冲直流电源的占空比实现可变的电压输出。

图4 线圈控制电路结构Fig.4 Circuit structure control
2 基于正交试验的参数优化
根据直流电磁机构的运动方程可知,线圈电流、吸反力的平衡关系等因素对接触器触动时间、动作时间和衔铁闭合速度有直接影响。因此,本文针对待优化的3组参数:磁轭厚度A、漆包线径B和分闸弹簧预压力C,设计如表1所示的参数及变化范围。

表1 电磁机构参数及变化范围Table 1 Ranges of electromagnetic mechanism parameters
为减少试验次数、提高计算效率,采用正交实验法研究各参数对电磁机构动态特性的影响。每个参数类型选取3组数据,选用最能反映接触器动态特性的合闸时间、电流峰值及衔铁闭合速度为优化指标,试验参数组合如表2所示。
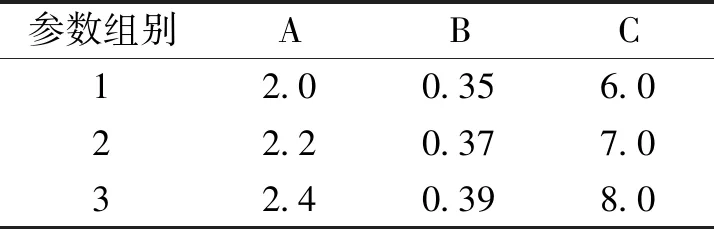
表2 试验参数组合Table 2 Combinations of parameters
由于本文试验采用三因素三水平的正交方案,可采用L9(33)的试验表进行数据处理。不同参数组合计算结果如表3所示。表3中,第1列为试验序号,即共须完成9组试验;2~4列为3种因素的不同组合;5~8列为不同组合下的仿真结果。

表3 不同参数组合的计算结果Table 3 Calculation results of combinations of parameters
在得到以上9组仿真结果后,对数据进行分析处理,结果如表4所示。由表4得出以下结论:触动时间最优参数组合A1、B3、C1或A3、B3、C1;合闸时间最优参数组合A3、B3、C1;电流峰值最优参数组合A3、B1、C1;衔铁闭合速度最优参数组合A1、B1、C1;由极差分布可知,线圈线径(因素B)对衔铁闭合速度影响较小,对电流峰值、响应时间影响较大,在符合线圈温升标准时应尽可能减少能耗;分闸弹簧预压力(因素C)的增加会延长衔铁触动与合闸时间;磁轭厚度对综合性能影响不明显,可以选取较小值来减少耗材。
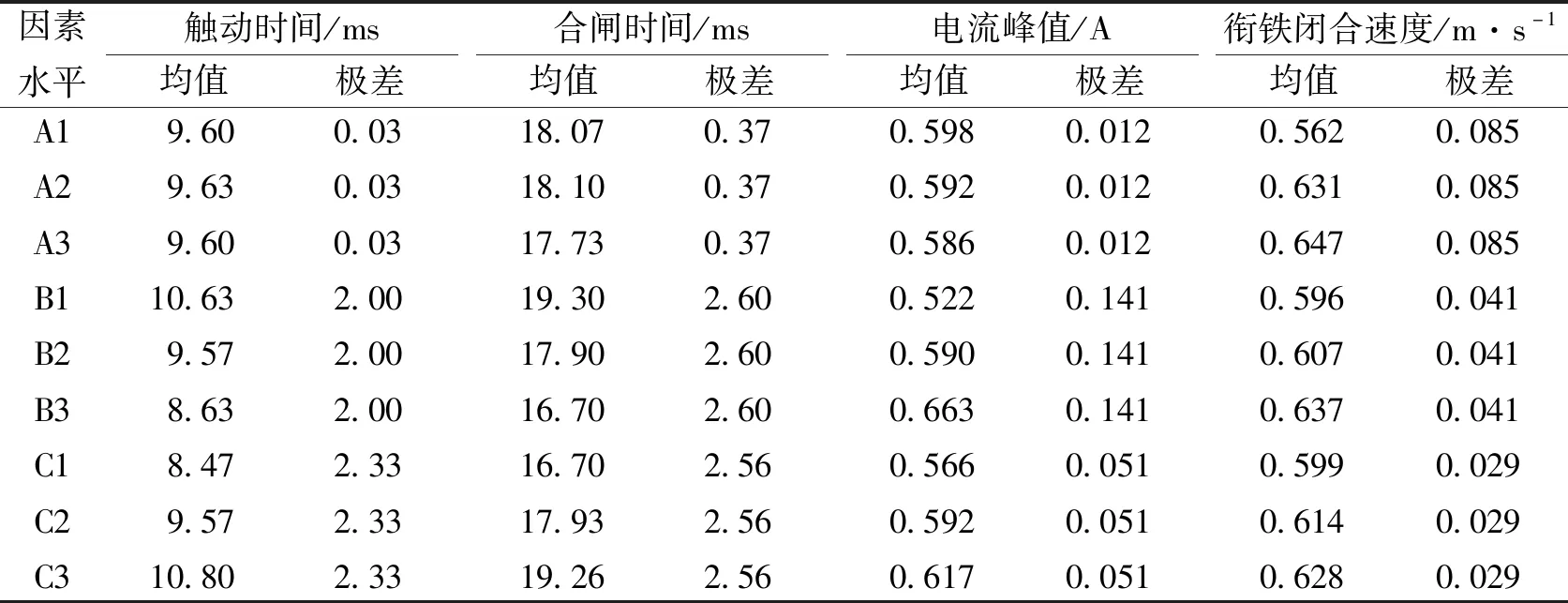
表4 参数仿真结果均值与极差Table 4 Mean and range of simulation results
为获取最优因素组合,需权衡合闸时间、峰值电流及闭合动能的指标要求。由于接触器性能要求合闸时间小于25 ms,上述参数组合均符合合闸时长规定,因此可以重点考虑影响线圈电流与衔铁闭合速度的参数;机构的电磁吸力特性过多地高于反力特性,既增大电磁系统的体积,又提升铜铁用量和成本,且过高的动作速度会使铁芯间与触头间发生猛烈冲击,触头易出现弹振现象,导致电弧重燃,严重影响接触器本身的电寿命。因此,在满足可靠吸合与维持的前提下,尽量选取闭合速度较小的参数组合以延长触头的寿命;线径大小影响线圈满匝时的匝数与电阻,改变骨架中心磁通变化率与线圈温升,影响触动与合闸时间,在满足合闸性能指标的同时应当尽可能降低线圈电流,减少线圈发热;弹簧预压力对合闸性能影响较为明显,因此可以适当降低弹簧预压力来提高机构的动作性能。磁轭厚度对整体性能影响较小,磁路未饱和的情况下可选择较小值,减小机构体积与耗材。综上,电磁机构最优因素组合为:磁轭厚度2 mm、线径0.35 mm、分闸弹簧预压力6 N,其他参数为:线圈激励18 V、线圈匝数18匝、线圈电阻25 Ω。
3 优化结果仿真分析
直流接触器动态特性直接反映衔铁动作过程中电磁、机械参数随时间变化情况。根据优化参数组合进行仿真计算,得到接触器动态特性曲线与磁场分布云图。直流接触器电磁机构动态特性曲线如图5所示。

图5 直流接触器电磁机构动态特性曲线Fig.5 Dynamic characteristic curve of DC contactor electromagnetic mechanism
图5(a)中,0至Tc时段为触动阶段,线圈通电后,由于电感的存在,激磁电流i(t)与电磁吸力Fx缓慢增加,此时电流I1为触动电流,Tc为触动时间。
Tc至Td时段为吸合运动阶段,衔铁加速运动直至与静铁芯吸合,在Tm1时刻达到第一个电流峰值I2。Tm1至Td时段内,线圈电流下降平衡动作过程中产生反电势,电流变化率与铁芯、磁轭、线圈尺寸结构等参数有关,期间弹簧载荷Ff随着衔铁位移逐渐增大,且始终保持吸力Fx>Ff。图5(b)与图5(c)中相同时间段内,随着气隙减小,电磁吸力Fx与衔铁运动速度v(t)迅速增加。吸合后,衔铁速度立刻降为0,运动反电势消失,线圈电流在I3的基础上增加。为更好地表示30 ms后电磁吸力已达到稳态,图5(c)中线圈激励电压始终保持18 V,根据图5(b)可以观察出电磁吸力已趋于平稳。
Td至Tm2时段为稳态过渡阶段,磁通继续增大直至饱和,电流趋于稳态I4=0.719 A,与理论值18 V/25 Ω=0.72 A相符。Td时刻后为吸持阶段,线圈电流大小直接影响机构温升与骨架散热,为降低线圈稳定吸合时的温升,防止因为高温导致的吸持不可靠,控制电路采取高压吸起,低压保持的策略,减少接触器吸持功耗。仿真时,设置线圈电压在30 ms切换,40 ms降至8 V,55 ms后衔铁稳定吸持,稳态电流值为0.321 A,对应时刻下电磁吸力稳定在78 N。根据衔铁吸合位置的麦克斯韦电磁吸力计算公式(式5),合闸保持力理论值为70.72 N,符合可靠吸合10%的设计裕量。经仿真验证,6.8 V时衔铁仍然能保持吸合,满足电压小范围波动(85%UN~110%UN)仍能够保持稳定吸合的标准要求。
图6为吸合瞬间(18.1 ms)电磁机构磁场分布云图和矢量图。图6中隐藏了线圈,仅保留磁路中铁磁材料部件。电磁机构在工作时,既要使运动部件的磁感应强度足够大,以产生较大的电磁吸力,又不能过度饱和,防止剩磁过大[15]。结合云图6(a)、(c)与矢量图(b)可以观察出在衔铁与静铁芯接触部分所受的电磁吸力最大,磁感应强度介于1.80~1.95 T之间;图6(a)、(c)、(d)表明磁轭上大部分磁感应强度处于1.05~1.50 T之间,磁化程度居中,仅在静铁芯与磁轭连接处磁感应强度较大,其值不超过2 T。由图6(b)可以看出,绝大部分磁力线都流过铁磁材料所构成的磁路,空间中漏磁很小,与预期相符。

图6 电磁机构吸合瞬间磁场分布情况(单位:mm)Fig.6 Magnetic field distribution of electromagnetic mechanism at the moment of attraction(unit:mm)
4 结论
本文通过Maxwell磁场仿真软件完成某型号直流接触器电磁机构仿真建模与动态特性分析,并针对3种参数进行正交试验优化的方案设计,将所得数据进行均值极差处理;然后,分析3种不同因素对各机构性能指标的影响程度,获取最优因素组合并进行仿真计算。仿真结果表明,一方面,优化方案能够满足电磁机构性能指标要求,相较于原样机动作特性,优化后衔铁闭合速度减少16.8%,峰值电流降低10.0%,有效延长了接触器电磁机构的电气与机械寿命;另一方面,提出的节能策略能够实现衔铁低电压吸持,降低线圈能耗,试验方案可为直动式直流电磁机构优化提供思路。下一步的研究方向是对接触器触头电弧动态演变过程研究,结合电磁机构进一步完善直流接触器的动作性能。
