基于机器人的电缆隧道智能消防系统
2022-09-08王斌
王斌
(国网智能科技股份有限公司,济南 250000)
0 引言
电缆隧道是市政供电、工业电力、信息通信等电缆的输送通道,是火灾防控的重要节点。电缆短路、电缆接头故障、照明通风等附属设施电气故障、外部火源进入等因素[1]均可诱发火情。电缆隧道受限于管线密集、空间狭长、光照不足等客观条件,一旦起火,其火势将迅速蔓延,有毒烟雾弥漫[2],导致人工抢险救援面临诸多风险[3]。因此,针对电缆隧道复杂环境,提早发现火情、快速灭火十分必要。
目前,电缆设备一般依靠人工定期巡检,但是存在工作强度大、危险性高、巡检效果依赖工人职业素质等缺点。现有的电缆隧道消防设施主要有电缆表层线性感温火灾探测器、分布式烟雾传感器、声光报警等火情探测设备[4-6],重点部位(如电缆接头)的固定式灭火器等扑灭设备,防火墙和防火门等[7]防火隔断设施。上述都是一种固定、离散的监测系统,虽然有很大的覆盖面,但是不能实现对隧道的完全覆盖,各部分缺少联动、整合;当发生紧急情况时,无法在第一时间将现场实时情况提供到监控中心。
本文的电缆隧道消防机器人已经开始逐步推广,替代人工承担上述繁重、高危任务。消防机器人可以第一时间进入事故现场,并提供现场实时音频、视频等数据以便于应急处置人员会商、研判,还能及时启动搭载的灭火器进行灾情处置。
1 电缆隧道智能消防系统构成
电缆隧道场景的智能消防系统主要由自动防火门、消防机器人及附属的轨道子系统、通信子系统、充电子系统、系统后台等,如图1所示。消防机器人搭载火焰探测器、红外测温热像仪、烟雾传感器、可燃气体传感器等环境检测组件,以及超细干粉灭火器等火情扑灭装备。
1.1 消防机器人本体
电缆隧道消防机器人采用轨道承载、导航方式。轨道应用自行开发的工字异形铝合金型材,固定在隧道顶端或者壁挂式连续架设。机器人在轨道上运行,不影响下方通道的人员通行,不受隧道内集水坑、地面障碍物等不利因素影响[8],能适应电缆隧道局部大坡度、急转弯、小空间等复杂地理环境。
如图2、图3所示,消防机器人运动机构采用前后2个轮组,前轮组为驱动轮,后轮组为从动轮,相当于机器人的“前桥”和“后桥”,两者分别通过销轴铰接于底盘上。当机器人运行至转弯轨道时,导向轮系会受到转弯轨道的轨迹轮廓挤压,使得驱动轮和从动轮旋转一定角度,带动机器人本体水平转向。机器人伺服电动机布置在驱动轮组上,速度与转矩通过齿轮系和传动轴,传递至两边的行走轮,驱动机器人行走运动。导向轮和行走轮采用聚氨酯包胶轮,具有较好的减震性。

图2 消防机器人运动平台结构图

图3 整机实物图
消防机器人使用携带的锂电池供电,并能自主无线充电。消防机器人监测到电池低电量时,将执行预先设置的充电任务,刷到充电点RFID标签停车,机器人本体上的无线充电接收盘和轨道上的发射盘对中,自动开启充电箱中的串口继电器,进行自动充电,并上报充电状态信息。
1.2 火情探测预警系统
电缆内部火源[9]的发展一般会经过初期温度异常升高阶段、释放烟雾但无火苗的阴燃阶段和起火燃烧等阶段。消防机器人携带的红外热像仪获取电缆热信息并传输至后台。机器人搭载红外、紫外复合的火焰探测器,能实现对电缆隧道内火焰的识别和响应。搭载的环境检测传感器,在巡检过程中采集实时数据,与系统后台设置的报警阈值比对,当数据异常时会在后台出现报警提示。
消防机器人配有拾音器和扬声器,实现监控后台与电缆隧道现场的音频信息交互,便于后台处置人员实时获取现场情况,指挥内部人员科学施救或逃生。
1.3 火情应急处置
为应对电缆类火灾,消防机器人配备的是超细干粉灭火器,有效覆盖空间约为25 m3,可以温控感应自启动或是电控启动两种模式进行火灾处置。超细干粉灭火器启动后,超细干粉以全淹没方式瞬间笼罩火源,能快速将火灾扑灭在萌芽状态。机器人完成灭火任务后,需维护人员更换新的干粉灭火器,机器人本体可以重复使用。
1.4 消防隔断自主穿越
按照消防设计要求,电缆隧道需要每隔一定距离设置防火隔断。机器人的轨道需要沿巡检路径连续铺设,势必会贯穿防火隔断,当机器人穿越防火隔断时需要改造相应的常规防火门或防火隔断,以供消防机器人通过。如图4所示,为减少对现有行人通行的常规消防门改动,本文的技术路线是在防火隔断顶部墙体位置新增专用自动门,两者一上一下、功能独立、互不影响,消防机器人可自主穿越自动门,进入下一个区间进行作业;穿越后,自动门恢复常闭状态。
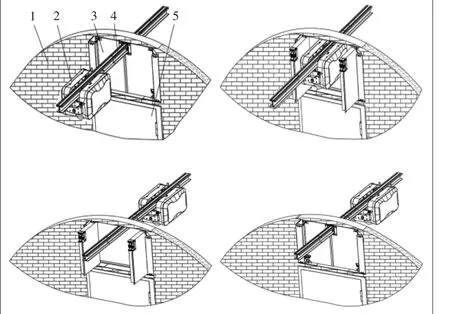
图4 机器人自主穿越消防隔断流程
本文的自动门结构采用两扇平开门方式,通过安装在两侧门框内的步进电动机驱动固定于门扇上的齿轮,带动门扇旋转,开门、关门都有位置检测传感器并上报状态报文。如图4所示,在自动防火门前后的轨道上各设置RFID定位标签,当消防机器人读卡器读到门前RFID标签的定位信息后,机器人降速并执行穿越防火门任务。消防机器人先查询门的开闭状态报文,如果门是关闭状态,系统向防火门控制板发送开启报文,左、右门扇错时打开,机器人慢速通过。消防机器人穿过后,读取到门另一侧的RFID标签位置信息,自动防火门板卡收到关门命令,电动机反向旋转以实现关门。
1.5 智能消防系统框架
如图5所示,智能消防系统总体框架分为3层,即隧道内的终端层、基站层和上述两者互联的通信层。终端层以消防机器人为核心;基站层包括服务器、后台软件、显示屏等设备;通信层使用光电转换器、交换机和无线站点等建立网络通道。隧道内布局多个AP形成无线中继覆盖整个电缆隧道,消防机器人本体与后台之间采用无线通信方式。后台与远程客户端使用光纤有线通信方式。

图5 消防机器人系统框架
2 消防系统联动策略
根据电缆隧道巡检需求,消防机器人执行定时自主运行或人工远程临时发令的方式进行巡检,沿轨道上RFID标签定位位置,并对关键部位如电缆接头位置执行重点红外测温任务,巡检过程中实时搜集环境数据和设备温度图像,如隧道内烟雾浓度、设备温升异常,并同步传送到系统后台与报警阈值比对;后台对终端层采集的设备温度数据、可见光图像进行智能分析和诊断,可判别设备故障。
电缆隧道火情报警条件设置好之后,如果系统传输上来的红外摄像仪温度和烟感浓度大于设定阈值并且异常数据持续时间超限,这时系统会经过预设的判别策略,启动火情报警,以应对电缆阴燃阶段情况;如果火焰探测器发现火苗后,系统立即报警。后台操作界面会弹出是否切换成手动控制状态,运维人员可快速将机器人切换到手动控制状态,运维人员对机器人的遥控操作具有最大的操作优先级。如果人工无操作,30 s后系统自动选择机器人自主实施扑灭。
3 消防灭火模拟试验
为了验证系统的有效性,主要进行了消防机器人识别火情并自动灭火能力试验。在试验场地铺设试验用轨道50 m,在轨道下方任意位置放一火源,火源设置遵循GA 602-2006《干粉灭火装置》要求。启动消防机器人并点燃火源,机器人沿轨道执行巡检任务,红外测温仪、火焰探测器、环境检测传感器采集数据并上传后台。
试验时,红外测温仪上传的测温图谱率先出现异常,机器人自动降速前行继续重点拍摄图像,后台研判测温数据异常持续时间、温升趋势;机器人继续行进,火焰探测器发出报警,消防机器人停车。后台启动灭火指令,本次试验操作人员不干预,30 s后消防机器人通过电控方式,自主启动超细干粉灭火器,喷射后超细干粉迅速淹没火源附近空间,火源被及时扑灭,如图6所示。消防机器人离开火灾点,运行到巡检任务的最后一个任务点,上报维护数据,提示运维人员更换灭火器。

图6 消防机器人试验
4 结论
基于消防机器人的智能消防系统,可以实时巡检电缆隧道的运行情况,能智能判别异常点、及时应急扑灭火苗、自主返回并提示维护更换灭火器。机器人可以将火场音视频数据同步传输至后台,便于火情处置人员研判灾害发展态势、现场情况,以便科学施救。
下一步将在提高消防机器人对火源识别的位置精准度、实现定向灭火等方面加强研究,以提高灭火的有效性,以及增加自主快速更换灭火器的机构,将消防机器人升级为搭载平台,实现多次往返火场,提高灭火持续性,应对火势大面积蔓延阶段的有效扑灭。
