基于无线充电系统的自动追踪智能小车
2022-09-07朱瞿辰汪敬华赵春锋
朱瞿辰,汪敬华,姜 宇,杨 兰,赵春锋
(上海工程技术大学工程实训中心,上海 201620)
0 引言
随着人工智能技术不断发展,智能控制应用也不断出现在各个场景,手持设备、智能终端的无线充电需求持续旺盛。2021 年第十六届全国大学生智能汽车竞赛中设立的节能信标组竞赛命题,要求智能小车在完成红外信标灯自动追踪的同时,自动完成从预埋在信标灯罩下的无线电能发射装置的充电行为。发射线圈的电能在小车过信标灯时被接收,并储存于超级法拉电容组中,供小车追踪控制的连续工作,比赛场地如图1所示。

图1 比赛场地示意图
经过无线充电、视觉识别以及追踪算法研究,以英飞凌TC264 作为控制核心,采用LCC恒功率无线控制技术进行高效充电,图像采集利用连通域算法进行信标搜索,使用PID 控制电机实现信标追踪功能。
1 系统整体设计
智能小车系统构成如图2所示。
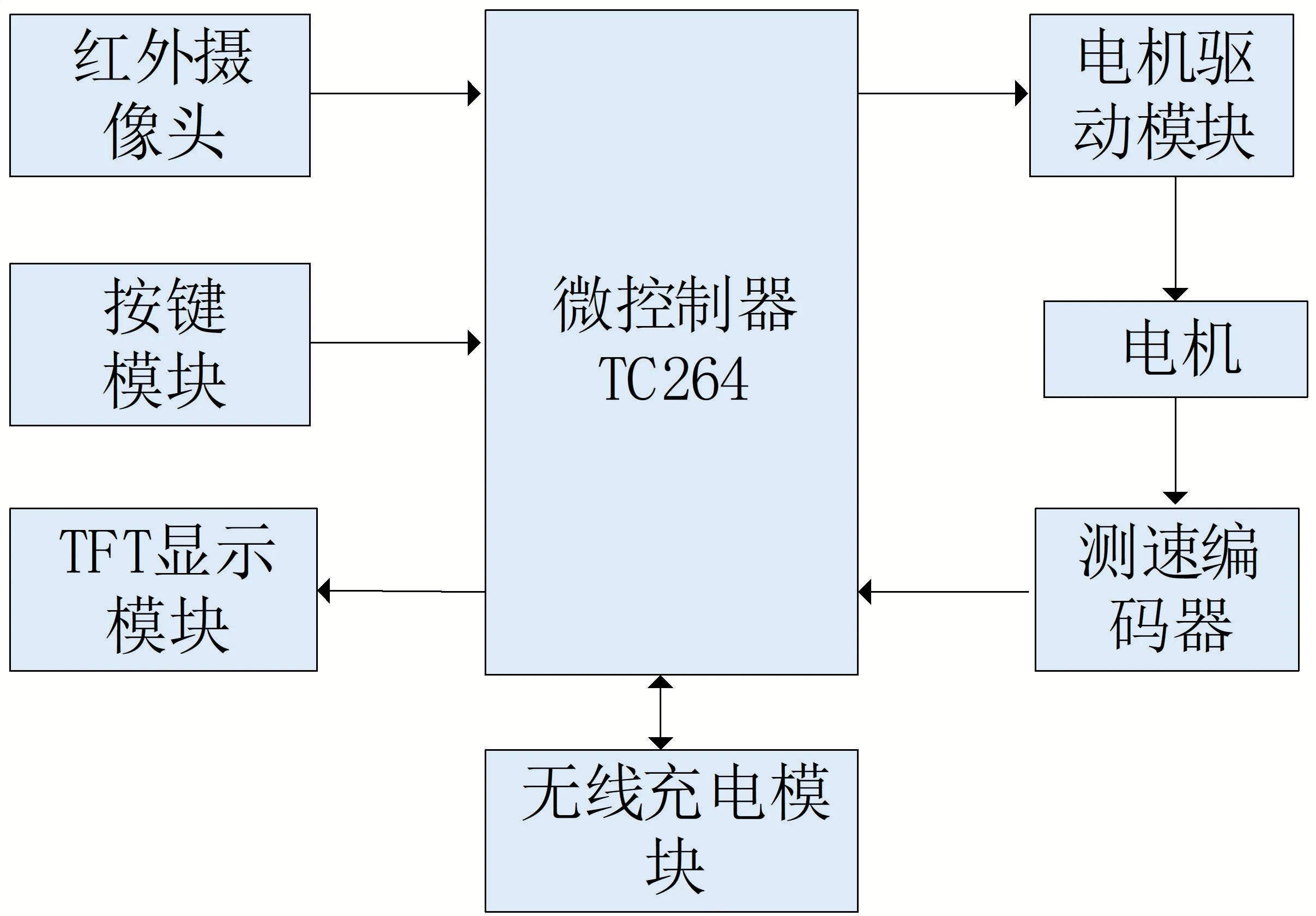
图2 智能小车系统组成
以英飞凌公司的TC264 微控制器作为系统的控制核心,TC264 最高主频200 MHz、双核TriCore™架构,有集成ADC 转换、I2C 总线、DMA、USART 等丰富资源,为汽车级芯片。采用逐飞科技公司总钻风摄像头采集红外信标位置坐标,自行设计LCC 恒功率无线充电以及储能模块为智能小车系统收集和存储电能。电机驱动模块和编码器是小车运行控制的必要组件,配有按键和TFT进行人机交互。
2 无线电能接收系统设计
2.1 恒功率充电接收系统结构
无线充电发射装置由竞赛组委会提供,恒功率充电接收端部分自行设计,由硬件和软件两部分组成。无线充电接收硬件组成如图3 所示,电能接收线圈经过LCC 补偿网络后进行全校整流变成直流电,再经过BUCK 电路恒功率控制将电能充入超级电容组,供主控系统工作。图3虚线方框为恒功率控制部分,电压采集采用了简单的电阻分压网络,电流采集将采集电阻串联在主电路母线中,差分电压由电流检测芯片AD8217 放大至0~3.3 V 送给单片机。采用TC264 单片机内部集成的ADC 采集电压和电流,进而计算出接收电能功率,根据设定功率调节BUCK半桥充电效率。

图3 恒功率充电硬件组成原理
2.2 无线电能传输LCC拓扑网络
无线电能传输前端采用了双边对称LCC 拓扑结构,如图4所示,为电能发射端线圈,将电能转换为磁场能,为电能接收端线圈,将磁场能转换为电能。发射装置将直流电逆变成交流电送给LCC(由L、C和组成)电路,经发射磁场能,接收端将磁场能转换为电能后送给LCC(由L、C和组成)电路后整流(1~4 组成)。发送端和接收端互相前后对称,因此称双边对称LCC 拓扑结构。采用LCC拓扑结构能够在后端负载变化(u变化)的状态下,让接收线圈保持恒定的电流值,有效提高能量接收效率。

图4 双边对称LCC网络
根据无线发射频率,需要对接收线圈和电容进行参数匹配,即确定L、C和参数。利用这三个元器件在同一工作频率下与电感阻抗值相等的方法计算各自参数。在实际使用时根据理论计算值采用标称电容进行并联匹配使得整流后的电压最大。经过LCC 谐振得到仍是正弦交流电,半波整流效率低,倍压整流和全波整流原理上具有相同的效率,实际实验时发现全桥整流比倍压整流具有更低的输出阻抗。
2.3 恒功率控制
为了高效控制充电效率,采用恒功率控制方法,恒功率充电系统原理示意图如图5 所示。通过单片机对BUCK 电路前端电流与电压采样并计算当前充电功率,与设定功率值进行比较,采用传统的PID 调节器计算校正结果,转换为相应的PWM 控制两个MOS 管组成的半桥电路,经由LC 组成的BUCK 电路对电容组进行恒功率充电。自行设计上位机软件绘制恒功率调节效果波形图如图6所示。

图5 恒功率调节原理示意图

图6 恒功率调节效果图
3 自动追踪程序设计
3.1 连通域定位算法
信标灯能发出10 Hz闪烁的红光和常亮红外光,采用带有可见光滤片的MT9V032 数字摄像头,只采集信标灯发出的红外光的现场图像,对其二值化处理和数字滤波,得到准确的ROI(region of interest)区域。
连通区域(connected component)一般是指图像中具有相同像素值且位置相邻的像素点组成的图像区域(region of Blob)。连通区域分析是将二值化后图像中的各个连通区域找出并做标记,在图像处理的众多应用中较常用的方法,其基本算法有两遍扫描法(two-pass)和种子填充法(seed-filling)。两遍扫描法是通过两遍图形扫描,将图像中存在的所有连通域找出并标记下来;而种子填充法是从多边形区域的一个内点开始,由内向外用给定的颜色画点直到边界为止。
本设计基于英飞凌TC264 单片机采用两遍扫描法找出信标灯连通域,根据重心法计算信标灯目标位置在图像中坐标。灯坐标与图像锁定如图7所示。
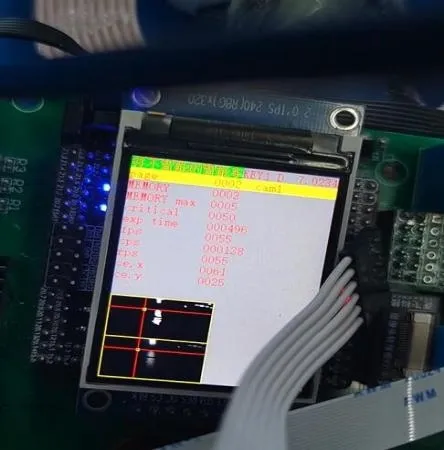
图7 寻灯坐标与图像锁定效果图
3.2 寻灯控制策略和效果
在设计小车寻灯的程序中,设计了速度环和转向环,速度环作为外环,转向环为内环。找到信标灯后,小车要快速定向追踪到信标灯压灯、灭灯,灭灯后要有合适的原地转动速度以快速寻找下一个信标灯。在灭灯、寻灯的过程中,小车能够选择停留在信标灯上进行无线快速充电以获取下一次追踪信标灯时消耗的电能。最优化路径、无线充电效率以及寻灯充电策略作为本次比赛角逐的要点。
采取了切灯斜边的方法使小车跑动更加流畅,同时使磁铁完美贴合信标灯达到灭灯触发要求,以达到快而高效灭灯的竞速要求。转向速度的控制主要考虑路径最优化,在接近信标灯时提前拐一个小角度在信标灯切线方向行驶,灭灯时加速转向。此方法的难点在于精准控制小角度转向以及速度把控,根据多次试验以及Matlab进行速度和方向拟合,转化为控制算法写入单片机中,最终小车制作实物效果如图8所示。
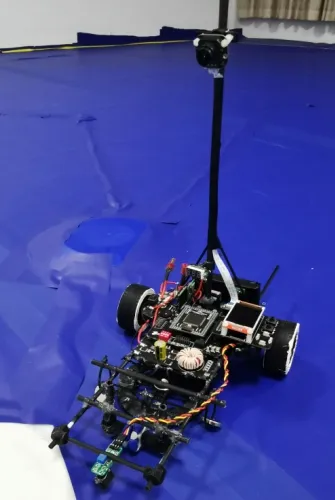
图8 最终小车实物
4 结语
根据竞赛要求在红外信标灯自动追踪的同时完成自动续航充电,本文描述了LCC 恒功率无线充电的控制为小车进行高效无线充电,对红外图像采用连通域方法寻找信标灯坐标,实现智能小车精准的信标定向循迹追踪。这种设计方案在比赛中获得成功,对于其他项目开发具有一定的借鉴意义,为今后的相关研究打下了良好的技术基础。
