下肢外骨骼康复机器人机械设计结构研究
2022-09-06喻行涛
喻行涛
(安川首钢机器人有限公司,北京 100176)
0 引言
外骨骼康复机器人是一种机械装置,它将人机工程学、仿生学知识适用于机器人技术[1]。外骨骼康复机器人是交叉学科,融合了如机器、电子、机器人和仿生学。它们用于患者的四肢,并由练习补充和替代,以智能/机械化的方式控制训练。这种骨骼机器人技术弥补了传统治疗方法的不足,并消除了人们非常关注的巨型康复设备的局限性。本文主要在其最重要的技术方面和发展方面进行论述[2]。
1 人体下肢运动分析
由于本设计为可穿戴式下肢外骨骼机器人,该机器可直接与穿戴者下肢连接,并与穿戴者同步运动。因此,设计时要考虑柔性对使用的影响。采用人性化的结构设计同时又必须反映出人体关节的运动特点,即仿生[3]。
1.1 人体下肢组成
人体下肢的各部分骨骼由髋关节、膝关节和踝关节这三个关节而连接在一起,组成了人体的下肢骨架,如图1 所示[4]。
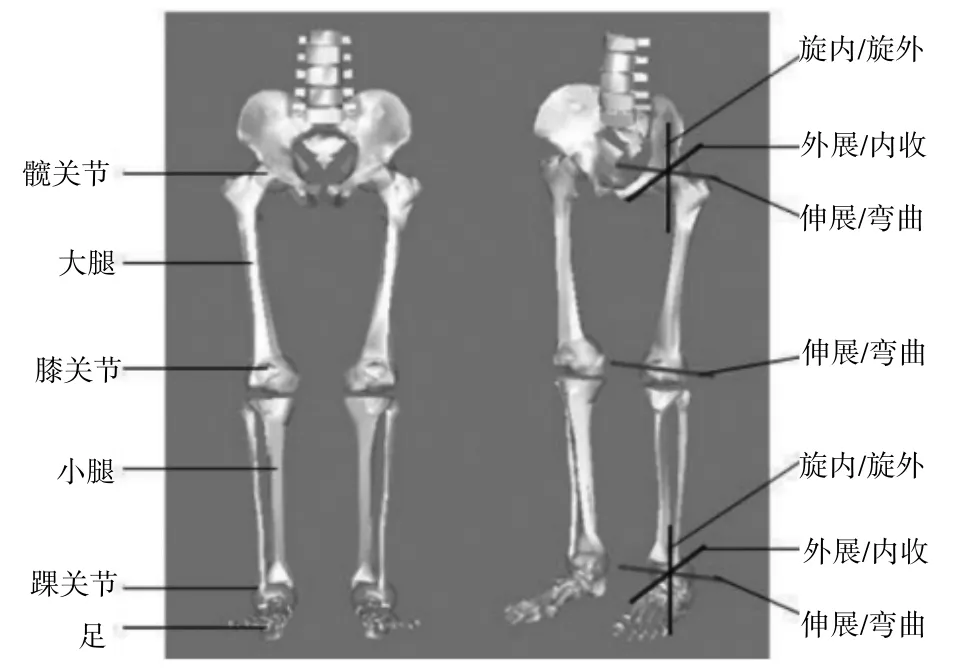
图1 人体下肢骨骼结构
1.2 步态周期时相分析
人体下肢运动是一种往复的周期运动,对于单侧右腿来说人体步态周期分为支撑期和摆动期。以单侧为例:首先右脚准备离开地面左脚进入支撑期直到右脚完全离开地面这占总步态的12%。此时右腿独自支撑整个身体重量这期间右脚跟着地与地面开始进行滚动运动,这个过程占总步态的40%。之后开始两腿支撑占20%。然后右腿开始进入摆动期,此时右腿先进行屈膝运动然后向前摆直到大腿小腿变成一条直线这一阶段完成。在这个过程中身体中心向前移动,直到左脚再次抬起,此时一个完整的步态周期完成[4]。
1.3 下肢外骨骼设计要求
(1)外骨骼行走时由驱动系统助力,为保证行走的安全性,在外骨骼的驱动关节都应设计有限行程限位装置。
(2)需要对其中重要零部件进行承载能力、刚度等计算和校核,来保证外骨骼的实用性和稳定性。
设计指标:由左右两条外骨骼腿组成,通过腰部零件连接。单侧外骨骼腿有5 个自由度,其中髋关节屈/伸和膝关节屈/伸是由电机驱动的主动自由度;髋关节的运动范围是-15 ~ 50°,膝关节的运动范围是0 ~ 60°;外骨骼本体采用铝合金制造,在大腿及小腿处设计绑带结构与人体连接,可以承载体重在100 kg 以下的患者。
2 总体方案设计
2.1 驱动系统的确定
由于本课题需要实现能够根据患者体质调节各关节的运动速度与运动幅度,所以选用无刷直流伺服电机。选用依据:
(1)可以避免出现电机失步问题。精度好,可以对位置、速度和力矩进行闭环控制。
(2)稳定,电机转动平滑、运行平稳,震动、噪音低。
(3)快速反应,电机从获得指令信号到完成指令所要求的响应时间短,要求转动惯量小。
(4)能够在苛刻的条件下运行,有频繁的正反向和加减速运行特性。
将驱动与关节中心同轴安装有2 种形式:①电机的输出轴直接与关节中心轴同心,经过减速器输出转矩;②电机与外骨骼腿杆平行安转,经过换向器后,再经过减速器与关节中心同轴,如图2 所示。

图2 驱动系统布位方案
图2(a)安装方案的优点是不需要换向机构,能减轻腿杆重量,缺点是电机在宽度方向上的尺寸较大,会使得关节处横向距离较大,电机离外骨骼腿杆较远,使得安装固定不方便,也不便于电机的平稳运行;图2(b)安装方案弥补了以上(1)的不足,将电机平行安装在推杆上,提高了整体的稳定性,减小了安装难度。另外,虽然添加了换向器,但其在横向方向上的尺寸得以减小,且由于电机的输出扭矩较小,故换向器不会太大,且可以选择功率较大的电机来克服增加换向器带来的负载的增加[5]。
本下肢外骨骼机器人采用大容量可充电蓄电池作为动力源,电能是一种比较环保的能源,没有燃油带来的有害气体排放问题。传动系统采用减速器加锥齿轮传动,没有选用传统的液压缸作动力元件,避免了出现液压油泄露的情况。整个外骨骼结构设计简洁,整体框架结构采用比较常用的铝合金材料。铝合金为高强度合金材料,拥有可以热处理、抗剥落腐蚀和抗应力腐蚀断裂等特性。其力学性能良好。其负重主要集中在腰部和大腿杆。在各关节处通过高副低代转化关节球副,并设计垫圈缓冲冲击。
2.2 确定机器人尺寸
下肢康复机器人在使用时要穿戴在使用者的身上,需要着重考虑到人机交互的设计。所以为了提高机器人的穿戴舒适性,在设计机器人的腿部尺寸时要与人体下肢尺寸相匹配,以人体下肢的主要尺寸信息为基础和参考依据。由国家技术监督局于发布的《中国成年人人体尺寸(GB/T10000-1988)》标准得到我国18~60 岁的成年男女下肢的主要参数,见表1。
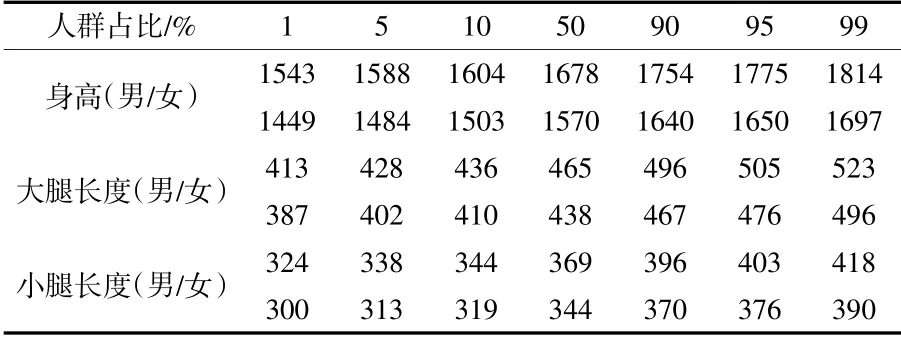
表1 18~60 岁男/女主要肢体尺寸(mm)
由表1 可知男女肢体的尺寸的分布情况,去除下肢尺寸特殊人群,选取下肢尺寸占比10%~90%的人群作为主要的参考对象,可以得到该范围内男性人群身高1604 ~ 1750 mm,女性人群身高1503 ~ 1640 mm;男性大腿长度436 ~ 496 mm,女性大腿长度410 ~467 mm;男性小腿长度334 ~ 396 mm,女性小腿长度319 ~ 370 mm。综合考虑男性和女性的下肢尺寸参数,选取男性和女性下肢尺寸范围中的最大值与最小值作为下肢康复机器人的下肢极限尺寸的参考值。由此,初步得到机器人大腿杆的长度调节范围410 ~ 500 mm,小腿杆的长度调节范围320 ~ 400 mm[6]。
2.3 零件的三维模型
装配体是由数个零件构成的,而零件是由各种特征构成的,特征是组成零件的重要部分[7]。只有在输入各个特征命令后才能生成符合要求的零件模型。
髋关节外展内/收运动件如图3 所示。此零件既能实现髋关节的外展/内收,又是连接腰部和髋关节及以下部分的连接体,按普通成人的身高计算,外展内收运动件的长度约为132 mm。其前端开有光孔用于实现髋关节的旋内/旋外运动。

图3 髋关节外展/内收运动件
腰板的作用是将外骨骼的左腿和右腿连接起来,同时背部承物架也固连在腰板上。单个腰板的长度为147 mm,上面开有等距离的7 个通孔,便于随时调节连接长度(图4、图5)。

图4 腰板
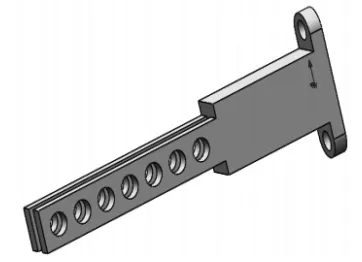
图5 腰板
腿杆的作用是将髋关节和膝关节、膝关节和踝关节等关节连接起来,杆上开有6 个等间距的通孔,便于根据使用情况调节机械腿的长度。腿杆的长度为280 mm,宽度为30 mm,高度为21 mm,以确保满足强度要求,如图6 所示。

图6 腿杆
安置于踝关节上的弹簧架,其安装形式为中间方形孔套于踝关节连接架上,通过两个并排螺栓与之紧固。弹簧架两侧也开有方孔,目的是便于悬挂拉伸弹簧。弹簧架整体的长度为118 mm,宽度为26 mm,高度为14 mm,如图7 所示。
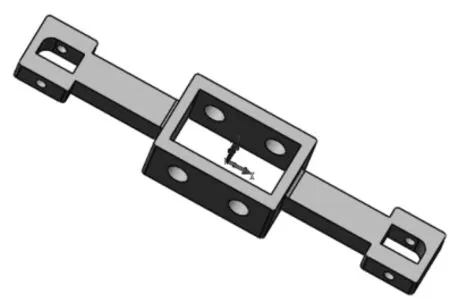
图7 弹簧架
2.4 下肢外骨骼装配
此模型共有10 个自由度,单下肢各5 个,其中髋关节有收展、屈伸和旋转运动3 个自由度,膝关节有屈伸运动1 个自由度,踝关节有屈伸运动1 个自由度。背部腰带将背部承物架和下肢机构连一起,大腿杆将膝关节和髋关节连接一起,小腿杆将膝关节和踝关节连一起,驱动系统安放在腿杆上。连接件均用铰制孔螺栓连接,连接牢固,可靠。
2.5 各个关节设计
(1)髋关节设计。在外骨骼设计时将髋关节设计为3 个自由度,即屈/伸、旋外/旋内、外展/内收。其中屈/伸为主动自由度,其余为被动自由度。屈伸运动为主要运动,采用了圆锥滚子轴承连接;内收/外展自由度设计在腰部,该机构不受驱动,只跟随身体运动变换状态;实现旋内/旋外运动的机构放置在主动自由度上方,该运动绕腿杆中心线转动,实现了整个腿部的旋转运动。
髋关节包括:腰带连接件、内收/外展运动件、旋内/旋外运动件、髋关节关节轴、圆锥滚子轴承、大腿杆、屈/伸运动件、调整垫片、轴承盖。
(2)膝关节设计。在外骨骼膝关节设计中,仅设置一个与人体膝关节屈/伸自由度同轴的旋转自由度来实现外骨骼膝关节的屈/伸运动。膝关节包括大腿杆连接件、关节轴、轴承、屈/伸运动件、垫片、轴承盖、小腿杆。旋转运动副中使用圆锥滚子轴承,同样为减少振动和噪声。
(3)踝关节设计。考虑到脚踝外侧空间位置与脚踝的连接,尽量使设计紧凑、贴近人体,从而减少偏差。踝关节不参与下肢行走的主运动,因此在此处没有添加驱动。如果行走过快,则会出现重心不稳,因此在两侧添加了拉伸弹簧,有效保证了行走时的稳定。
踝关节包括:固定弹簧的弹簧上架、小腿杆连接件、踝关节关节轴、深沟球轴承、屈/伸运动件、调整垫片、轴承盖、拉伸弹簧、脚板连接件、脚板。
弹簧上架通过两个平行螺栓和小腿杆连接;小腿杆连接件和屈/伸运动件用关节轴连接;脚板连接件和脚板用螺栓连接;在弹簧上架和脚板连接件上开有通孔,用圆柱销将两个拉伸弹簧分别挂住,同时在小推杆连接件上加工出限位凸台装置,防止拉伸弹簧出现压缩情况。
(4)限位装置设计。在人体结构中,每个关节运动幅度在一定角度内。为了保证患者下肢安全避免由于机器产生二次伤害,设置各关节的机械限位装置。使之不能由于控制系统失控运动到设定范围之外。
膝关节的关节限位装置,限位装置和屈伸运动件结合在一起,减少了机构的复杂程度,如图8 所示。屈/伸运动件上加工有一定角度的凸缘轮,在腿杆连接件上加工出相对应的凹圆轮,即屈/伸运动件的运动范围为0° ~ 60°。外骨骼中膝关节的设计和髋关节的设计几乎一致,只是运动的极限位置不同,这样减少了关节在加工制造过程中的复杂度。另外,外骨骼的控制策略为“人主机辅”控制,即主动控制,因此在其他辅助关节处不设限位装置,靠人体本身调节处理。
(5)腿杆设计。穿戴者人体胖瘦、高度存在差异,为了使外骨骼有更好的结构兼容性,将大腿杆、小腿杆和腰部设计成尺寸可调节结构。
经过大量采样并统计发现,人体各部位尺寸都在一个范围内。如果人体身高为H,则踝关节到地面尺寸0.039H,膝关节到地面尺寸0.285H,髋关节到地面尺寸0.53H,人体两条大腿之间的距离为0.191H。结构的最大可调范围设定为250 mm,腰部宽度可调范围为42 mm。本设计中腿杆结构通过调整腿杆的连接点来调整的长度,即大小腿的长度。上下腿杆用铰制孔螺栓连接,铰制孔螺栓主要承受横向载荷,连接牢固,稳定可靠。如图9 和图10 所示。

图9 腿部可调节连杆
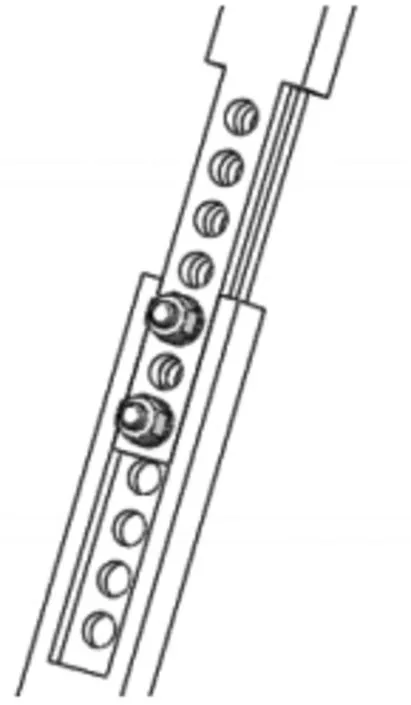
图10 腰部可调节连杆
(6)背部承物架设计。动力源电池和控制系统设计在背部背架上,背架上还设有一个负重平台。如图11 所示。
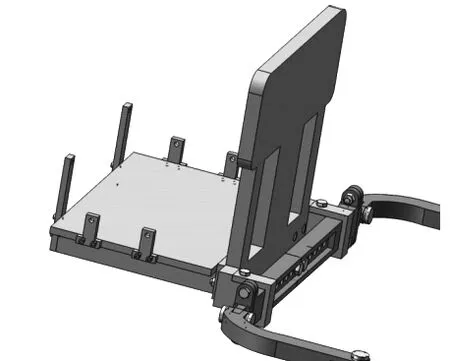
图11 背架结构图
背架通过两边的连接件与腰带用螺栓件相连,上面通过软绳与人体肩部相连,将负重通过腿杆传递到地面,尽量减小对人体的弯矩。背架上用于放置电池和控制组件,以避免核心器件与外部负重直接接触造成损坏。考虑到舒适性和减缓冲击,在穿戴者与腰部直接接触的支架板面粘接有柔软结实的棉垫护具。针对不同使用人群,腰部也设计成可调节结构,由于此背架无调节装置和限位装置,因此连接为过盈连接,防止出现横向滑移。此背部承物架的尺寸为长161 mm,宽220 m,高207 mm,要求能够承受25 kg 的负重。
2.6 外骨骼三维模型
在solidworks 三维建模软件中将设计的各零件按照装配图进行装配(图12、图13),并且加入所用到的各类标准件。
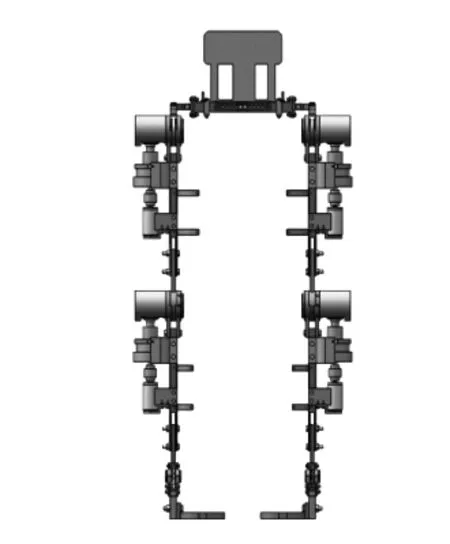
图12 外骨骼三维图正面
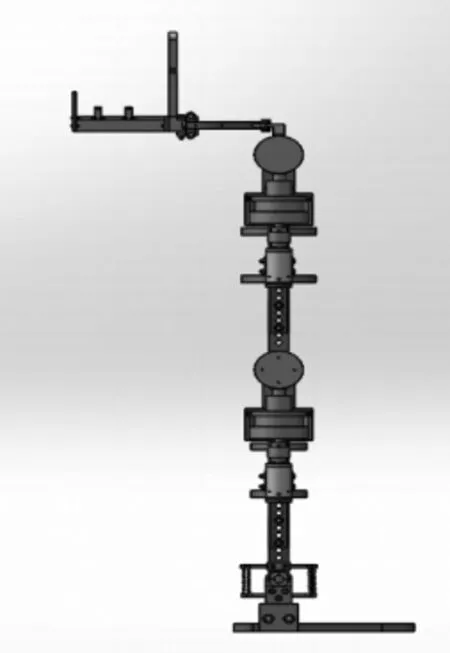
图13 外骨骼三维图侧面
3 结语
根据下肢外骨骼机器人的国内外发展现状,基于拟人化的思想和人体生物学理论研究,从人体下肢运动机理分析、外骨骼机构设计和建模、驱动系统的选型以及关键零部件的设计等开展了研究工作。下肢康复机器人其优点突出在于使用时要穿戴在使用者的身上,通过深度学习来做到辅助残患人士行走。然而外骨骼结构还需要很多优化设计,主要包括:如何将一些质量较轻同时又具有一定强度的新型材料(如镁合金材料)应用到外骨骼中,以进一步控制外骨骼的重量和尺寸;对于人机连接而言,在保证穿戴精度要求的前提下,如何分析设计更加合理的柔性人机约束是一个值得研究的问题;对旋转关节结构如髋关节、膝关节等进行进一步的优化,在保证完整的下肢自由度运动的前提下减轻复杂程度,使其稳定性和快速性得以提高。
