智能教室管家机器人设计与研究
2022-09-06屈世龙杨瑞青张庆晨张善群王玉飞
屈世龙,杨瑞青,张庆晨,张善群,韩 浩,王玉飞
(山东华宇工学院 机械工程学院,山东 德州 253000)
0 引言
随着时代的发展,先进的机器设备对于提高劳动生产率和产品质量都起到巨大的促进作用。并且机器人的应用领域不断扩大,各式各样为人类服务的工具也被逐渐创造出来。在我们生活中,扫地机器人、早教机器人、无人机等一些机器都已是大众所知。而这些机器可以作为科技技术的产物,可以更好地解决人的重复劳动,从而提高劳动效率和精确度。但是,大多机器普遍存在于家庭、农业、办公等一些地方,相对教育服务方面有所不足。例如,在我们的校园生活中,由于环境卫生方面上的不足,教室地面脏乱,课桌不整齐,多会影响学习。智能教室管家机器人会对课桌不整齐、教室地面垃圾的现象进行处理。
现在整理教室以人工劳动为主,摆放课桌、清洁卫生等,需要大量人力,且工作效率较低。该设计涉及教室整理部分工作环节的管理,从传统人工清洁转至机器打扫,体现出时代创新的发展。此外,对于智能扫地机器人针对路径规划方面较为普遍,如五邑大学提出一款智能扫地机器人[1],结合扫地机器人的实际应用,实现了可适用于复杂环境的全覆盖路径性能优化。智能教室管家机器人进行课桌整齐摆放有利于学生有一个健康良好的坐姿,从而有利于提高学习的效率,减少疲劳和不舒适感。并且随着智能化的发展,各类智能化产品受到大众青睐。
1 智能教室管家机器人方案及结构设计
1.1 总体方案设计
智能教室管家机器人最终要实现两种工作模式,即课桌整理模式、地面清洁模式,用户可以通过摄像头远程遥控进行规划和预先扫描录入的信息实现物品识别的技术,使移动终端可以与智能教室管家机器人进行通信,将教室的实时地形图显示在移动终端上。智能教室管家机器人设计分为4 个模块,分别为分布在底部的扫地模块、自动伸缩夹杆模块,中间的升降模块、控制模板。这4 个模块在高度方向上可完成相对运动,同时机器人底部的麦轮配合水平方向上的运动,即可实现方向改变且可同步进行扫地功能。
1.2 扫地模块结构设计
扫地模块主要采用吸尘方式来清扫地面,如图1所示。在扫地模块的框架内,主要由吸尘管道、垃圾储存装置、旋转扫帚、电机以及自动吸附装置组成。扫地模块通过旋转扫帚、大吸尘口完成地面的清洁,垃圾经吸尘管道后存放在垃圾储存袋中,储存袋可方便地取出倾倒垃圾后并换取新的一次性垃圾袋。其次,机器人在进行移动摆放课桌时,自动吸附装置可以吸附地面,从而增加机器稳定性。

图1 扫地模块结构
1.3 自动伸缩夹杆模块
自动伸缩夹杆模块采用电动伸缩杆[2],如图2 所示,夹板头部有较小的凹槽,便于夹紧课桌桌腿,其电动伸缩杆是利于电机马达通过齿轮传动,带动丝杆螺母,推动梯形螺纹丝杆的一种短距离实现伸缩运动的一种传动执行机构。

图2 自动伸缩夹杆模块结构
1.4 内部升降模块
为了将自动伸缩夹杆更好地与中间升降模块结合,中间模块基于移动装置传动完成对自动伸缩夹杆模块的升降功能和水平伸缩功能,机械升降装置安装在中部壳体内,依据课桌宽度进行调整间距,从而更好夹住课桌桌腿。其升降装置共有4 根导轨对机器升降运动进行导向,升降装置平面机构原理如图3、图4所示,此传动系统由驱动电机、导轨、固定台等组成。在驱动电机的作用下带动导轨上的固定台装置移动,即带动自动伸缩杆上下移动和机器两侧板水平移动,以实现桌腿间距调整及升降课桌。此种升降机构具有传动平稳、结构简单、方便维护的特点。

图3 升降装置平面机构原理
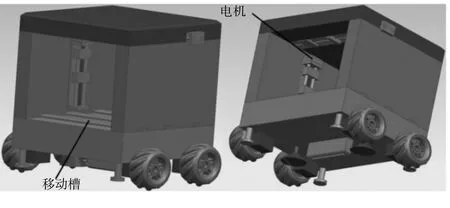
图4 升降模块结构
1.5 麦轮模块
本模块通过4 个独立驱动的麦轮[3]实现机械运动。如图5 所示,4 个麦轮分别安装在扫地模块两侧模块的底板上。其中4 个麦轮运动方向为机器人的各个方向,以保证前后左右方向运动顺利运行。

图5 麦轮模块
1.6 中间模块
该模块采用千斤顶装置[4]。千斤顶装置搭载有无线远程控制和实时通信模块,通过手机等设备来控制千斤顶的起落和移动。为了更好的拖动课桌,智能教室管家机器人结合千斤顶装置,使其对课桌底部进行上升拖动,以实现在伸缩杆拖动课桌基础上防止课桌滑脱。千斤顶装置安装在中间部位,以便于保持平衡,如图6 所示。
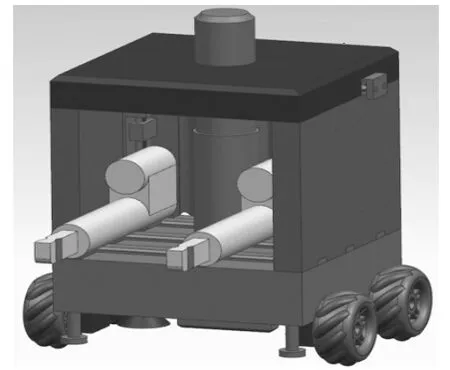
图6 千斤顶装置模块
1.7 整体结构
智能教室管家机器人外壳为一体式,呈中空长方体。该装置主要包括自动伸缩夹板、千斤顶装置、底部吸尘装置、麦轮、自动吸盘、电机组、遥控装置等,形成遥控系统、移动系统、吸尘系统、感应系统以保证机器正常运作。底部吸尘装置上方安装有控制装置和无线传输装置,以实现手机终端对扫地机器人的控制。遥控系统结合现有技术中扫地机器人的远程控制方案能很容易实现远程控制。同时,移动系统通过控制装置控制位移机构实现夹板进行左右和上下的移动。智能教室管家机器人的整体结构示意如图7。
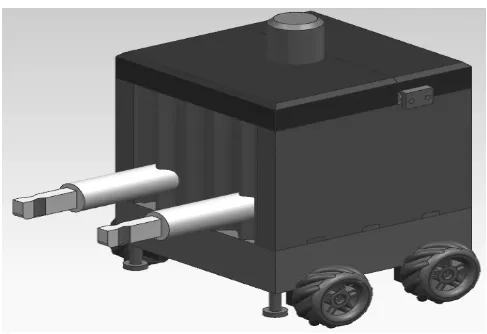
图7 整体结构
2 智能教室管家机器人工作原理
2.1 运动系统功能
该机器由多个多部分组成,主要包括自动伸缩夹杆、底部吸尘装置、麦轮、自动吸盘、电机组、遥控装置等,由摇控系统、移动系统、吸尘系统、感应系统分别协调控制,保证了智能教室管家机器的正常运作。整个装置可以分为4 个模块:扫地模块、自动伸缩夹杆模块、中间的升降模块、控制模板。
(1)扫地模块,其功能是通过规划路线清扫教室地面,它的顶端设置有一个可旋转的激光发射头和配套接收器,通过发射激光扫描自身到边界每个点的距离,从而生成数字地图,还能根据屋内家具位置的变化实时进行更新。同时在到达相应指定位置时,底部吸盘自动降落吸附地面,从而稳固该机器本身,防止在搬运课桌时发生倾翻。
(2)自动伸缩夹杆模块则是夹紧拖动课桌的同时,进一步巩固课桌稳定性,利于该机器人稳定运行。
(3)中间升降模块基于移动装置传动完成对自动伸缩夹杆模块的升降功能和水平伸缩功能,并依据课桌宽度而定,从而更好使自动伸缩夹杆夹住课桌桌腿。
(4)控制模板是安装有最基本的控制装置和无线传输装置,而且具备位移功能的结构,即通过控制装置控制位移机构实现两侧固定板、夹杆进行左右和上下的移动。
除此之外,通过摄像头远程遥控进行规划和预先扫描录入的信息,可以在移动终端上,如iPad、手机等,通过移动终端与智能教室管家机器人进行通信,将教室的实时地形图显示在移动终端上,这样人们就可以轻而易举实现对桌子位置以及需要清理的垃圾进行识别。
2.2 中央控制系统
对于规划和预先扫描录入的信息实现物品识别的技术,设计的智能教室管家机器人使用红外探测技术在清扫之前通过激光发射器扫描房间,获得房间的图形信息,然后依据房间图形信息进行路径规划,最后根据设计的路径规划系统能够最终进行全覆盖清扫。此外,该设计还包括遥控器和接收器两个部分,操作者使用遥控器对机器进行相关操作,当作业完成后,通过遥控器下达回归的指令,当遥控装置接收指令时,智能教室管家机器人依照原本路线回到原有位置。
2.3 技术路线
首先通过建立三维建模进行仿真安装、调试。初始时,智能教室管家机器人先通过录入教室大小,获得房间的图形然后再进行路径规划以及课桌位置设定。对于路径规划则是采用激光测距式导航系统,智能教室管家机器人通过激光测距的方法生成室内地图,在此基础上合理地规划清扫及搬运路线,而不是试探性来回碰撞。相比之下,该规划路线更能看出其设计的智能之处。其实现原理是:它的顶端设置有一个可旋转的激光发射头和配套接收器,通过发射激光扫描自身到边界每个点的距离,从而生成数字地图,还能根据屋内课桌位置的变化实时进行更新。室内图像录入后,该机器开始对教室实施工作,并遥控下达进一步指令,遥控装置接收指令,控制电机转动,机器开始工作,从而实现课桌整理,地面清扫。且机器到固定位置后,通过对前期激光扫描并反馈生成室内地图进行识别对比,若课桌不整齐将会进行搬运整理,自动伸缩夹板通过该机器内部升降装置调节至合适位置,进一步伸缩进入课桌底部,其自动伸缩夹板是根据课桌桌腿宽度进行调整,并水平从装置内导出。此外,智能教室管家机器人内部装有千斤顶装置,其功能是将其课桌底部顶起,并通过指令移动至指定位置;若课桌与生成图像位置一致时,该机器选择对其忽略搬运。当智能教室管家机器人电量过低时,可根据最近位置关系返回并进行充电,待充电完毕后,返回原有位置进行之前未完成工作。任务结束后,用遥控器下达回归的指令,遥控装置接收指令,智能教室管家机器人依照原本路线回到原有位置。
3 智能教室管家机器人应用情况分析
3.1 可以智能精确摆放
该智能教室管家机器人,通过室内图像识别判断,进一步对课桌整理摆放。当课桌与目标位置一致时,该机器停止整理,并且依靠数字图像识别合理路线返回充电待机。该设计解决了整理课桌效率差,从而提高课桌摆放的精确度。
3.2 操作便捷,省时又省力
可以远程遥控和自主清洁。智能教室管家机器人则可以通过千斤顶装置及自动伸缩夹杆装置的结合,从而代替人力搬运,劳动力得到一定的解放。同时该机器对教室即能整理课桌又兼备智能打扫,进行明确的方案制定与安排。
3.3 合理规划,性能强
该设计结合“整理+清扫”两种形式,在整理摆放课桌的同时,又能清扫地面。并且采用激光测距式导航系统,可以对教室房间大小进行扫描,并制定路径规划,然后自动对教室进行整理。
3.4 可以清洁复杂环境
对于人工清扫来说,像地缝、边角等位置只用扫帚拖布是很难打扫干净的,时间久了就会留下厚厚的积尘,而智能教室管家机器人则可以通过扫吸等方式将隐匿的灰尘杂质打扫干净。
4 结语
本文设计了一种整理课桌及清扫地面一体机器人,该智能教室管家机器人,集手机遥控技术、扫描技术、物件搬运技术于一体,操作便捷,性能强且工作项率较高,能够有效地帮助教室清洁人员减少工作强度和提高工作效率。本文所设计的智能教室管家机器人解决了目前市面上在扫拖机器人基础上几乎没有课桌整理功能的问题,为教室课桌整理及地面清洁装置的研究提供了参考借鉴。
