窄缝卫生检测及清扫机器人研究与设计
2022-09-06杨灵敏
杨灵敏
(柳州工学院,广西 柳州 545516)
0 引言
智能扫地机器人是服务机器人领域比较热门且应用较为广泛的一个研究方向。扫地机器人体现了移动机器人的许多关键技术,比如环境感知和路径规划、自动寻找充电座进行充电等,智能扫地扫机器人大大降低了人们扫地的劳动强度、提高劳动效率,新的机器人更是适用于大众家庭、图书馆、酒店、写字楼等多种环境[1-3]。随着生活节奏的加快,扫地机器人有着广阔的市场前景。但随着新冠疫情的影响,大家更加关注家里的卫生情况。而扫地机器人通常并不具备卫生情况的检测功能,由于尺寸限制也无法进入床底、柜底等小窄缝位置。而这些位置的卫生情况通常非常糟糕,因此,需要能够进入窄缝的卫生检测和清扫机器人来完成这些特殊任务。
一般的扫地机器人主要功能是扫地,但一些功能较完善的智能扫地机器人还能进行清扫、吸尘、擦地、湿拖等工作[4-5]。扫地机器人通常包控制系统、传感器、驱动电机与动力传动机构、电源模块、吸尘部件等[6-7]。扫地机器人驱动部分一般由两台直流电机驱动配以万向轮,传感器通常会有接近开关、红外及超声波距离传感器,甚至有一些机器人加上了V-SLAM 视觉导航系统[8]。清扫系统在扫地机器人底部安装有吸尘和清扫机构。但由于要满足日常卫生清扫工作,要清扫的任务较大,其结构尺寸较大。
本设计的窄缝卫生检测和清扫机器人参考扫地机器人的部分主要功能,并经行扁平化设计,压缩机器人的厚度,增加卫生检测功能模块,对机器人的结构也进行了特殊设计,创新设计了Y 形垃圾推移装置。扁平化的机器人厚度不超过10 mm,能顺利进行一些窄缝进行卫生检测工作。通过卫生检测装置的摄像头能拍摄窄缝内的环境图像,且左右摄像头同时工作,经过控制系统处理形成基于机器双目视觉影像。当机器人进入较深的窄缝内部进行卫生监测时,照明灯可以提供照明;红外探测传感器可以对窄缝内是否存小虫子、蟑螂、老鼠、蚂蚁等生命体进行探测。在驱动装置的带动下独立进入窄缝内对卫生情况进行很好检测并可通过手机发送相关的卫生情况报告[9-10],以便让用户了解室内甚至窄缝内的卫生情况。
1 机器人主要机功能构设计
窄缝卫生检测及清扫机器人主要包括机器人本体、驱动装置、控制系统、卫生检测装置、灰尘细屑清扫装置等。机器人本体为高度小于10 mm 的扁平状。该机器人有1 套基于双目摄像机成像技术的机器视觉检测装置,分别安装在检测支架的左右两侧的安装平台内,且卫生检测装置距离安装平台的边缘有一定距离,机器人前端还设计有垃圾推移装置,该垃圾推移装置包括Y 型推移骨架、垃圾推铲,推移骨架安装的检测支架的内侧成Y 型张开形状,垃圾推铲位于检测支架及Y 型推移骨架前端底部且刀口向前。当控制系统检测到推力过大时,说明此时的垃圾质量过重或推到固定桩或钉子,则放弃推移任务,有效保护了机器人,其性能比较可靠。这样的设计可以对较大的垃圾进行推移处理而不是收集进机器人内部较小的收集盒,完成了大小类垃圾的分类处理。窄缝卫生检测及清扫机器人的结构如图1、图2 所示。
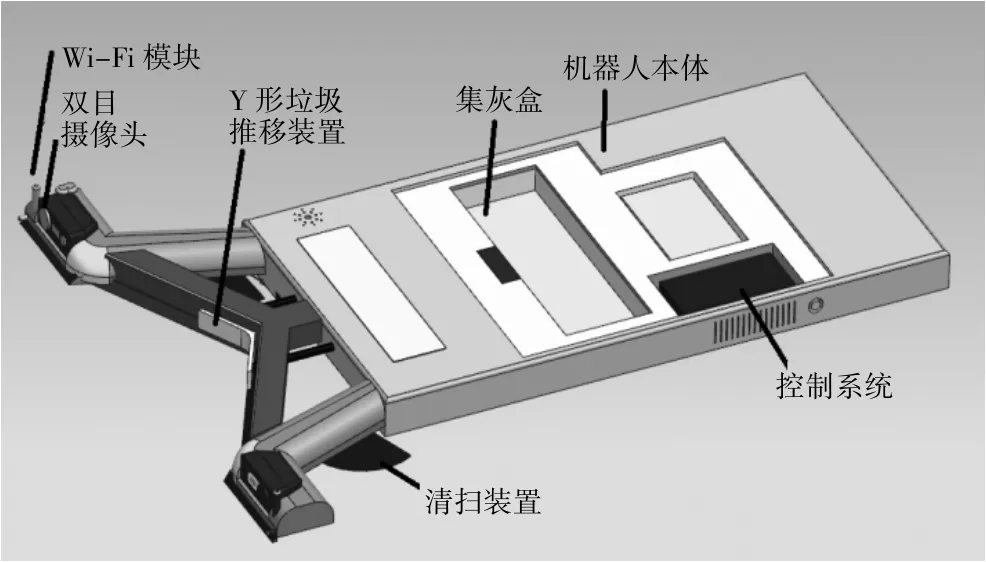
图1 机器人结构图(去掉部分上盖)

图2 机器人底部试图(去掉部分底盖)
机器人的卫生检测装置包括摄像头、照明灯、红外探测传感器,摄像头与控制系统的输入输出端连接,红外探测传感器与控制系统的输入端连接,照明灯与控制系统的输出端连接。卫生检测装置的摄像头能拍摄窄缝内的环境图像,且左右摄像头同时工作,经过控制系统处理形成基于机器双目视觉影像。当机器人进入较深的窄缝内部进行卫生监测时,照明灯可以提供照明,红外探测传感器可以对窄缝内是否存小虫子、蟑螂、老鼠、蚂蚁等生命体进行探测。因此,机器人能在驱动装置的带动下独立进入窄缝内对卫生情况进行很好检测。即使对于极窄的窄缝,机器人无法进入可以通过拍照方式获得窄缝内的卫生情况,因此,可以对几乎所有窄缝的卫生情况都能进行检测。
窄缝卫生检测及清扫机器人本体设有上盖、下部前盖、下部后盖、锂电池散热孔、侧盖等。上盖安装在机器人本体的顶部,用于将控制系统芯片和充电锂电池进行有效保护;下部前盖安装在机器人本体的底部前端,用于对前轮驱动双轴电机进行保护并对灰尘细屑收集盒进行支撑;下部后盖安装在机器人本体的底部后端,用于对后轮驱动双轴电机进行保护;锂电池散热孔设于充电锂电池正对的侧壁上;充电接口设置在充电锂电池附近侧壁上;侧盖设置于灰尘细屑收集盒正对侧壁上,且侧盖与锂电池散热孔、充电接口不在同一侧面,以避免灰尘细屑对充电锂电池及充电接口的影响。
机器人驱动装置安装于机器人本体的底部,该驱动装置包括驱动前轮、前轮驱动双轴电机、驱动后轮、后轮驱动双轴电机、充电锂电池。前轮驱动双轴电机的输入端与控制系统的输出端连接,前轮驱动双轴电机输出端与驱动前轮连接,后轮驱动双轴电机的输入端与控制系统的输出端连接,后轮驱动双轴电机输出端与驱动后轮连接;充电锂电池的输入端与设置于机器人本体上的充电接口连接,充电锂电池的输出端分别与前轮驱动双轴电机、后轮驱动双轴电机、控制系统连接。
控制系统包括控制芯片、信号发射接收天线、超声波测距传感器、窄缝高度碰撞传感器、前进碰撞传感器、后退距离传感器。窄缝高度碰撞传感器以力触发,用于防止机器人进入卡死的细缝。前进碰撞传感器以力触发,用于当碰到障碍物时停止并回退,后退距离传感器以超声波方式探测,用于防止机器人回退碰到障碍物。信号发射接收天线与控制芯片双向通信,控制芯片通过该信号发射接收天线与用户的手机端相应的APP 连接。机器人交互系统的显示屏、微型音响,显示屏位于机器人本体前端的背部,主要用于显示机器人状态信息,微型音响设置于显示屏旁边,主要提示机器人状态信息及报警信息。窄缝高度碰撞传感器、前进碰撞传感器、推移力传感器、后退距离传感器的输出端与控制芯片的输入端连接。
机器人的拖地装置包括灰尘细屑清扫机构和拖地机构,灰尘细屑清扫机构有两套,分别对称安装在机器人本体前部的检测支架下部。尾部拖地机构包括多段均匀分布的拖地滚筒抹布。 在机器人本体的底部还设置有灰尘细屑收集导向通道、灰尘细屑吸入口、灰尘细屑入盒通道、灰尘细屑收集盒,灰尘细屑收集导向通道与灰尘细屑清扫机构连接,且灰尘细屑收集导向通道、灰尘细屑吸入口、灰尘细屑入盒通道、灰尘细屑收集盒依次连通在一起。
2 机器人部分传感器及模块
2.1 超声波传感器
在机器人中,避障功能的实现利用了超声波测距的原理,它的传感器部分由一个发射探头和一个接收探头组成,超声波以一定频率(一般为40 kHz)的声波在同种介质中以恒定速率传播,而在碰到障碍物时,会产生反射,通过这一特性,根据测量发射波与反射波之间的时间间隔以及声波的速度,就可以实现测量距离。具体的计算公式如下:
其中:L为障碍物与吸尘器之间的距离;v为声波在空气中传播的速度;t为发射到接收经历的时间。
为了防止扫地机器人遇到台阶时跌落,在机器人底部安装防跌落传感器。防跌落传感器也是利用超声波进行测距。当扫地机器人行进至台阶边缘时,防跌落传感器利用超声波测得扫地机器人与地面之间的距离,当超过限定值时,向控制器发送信号,控制器控制扫地机器人进行转向,改变扫地机器人前进方向,从而实现防止跌落的目的。
2.2 双目摄像机及红外探测传感器
机器人利用双目摄像头拍摄图片,采集环境的地面图像然后给控制系统做相应的图像处理,通过处理可以获得地面的细屑或灰尘等的光洁度信息。双目立体视觉系统是机器视觉的关键技术之一,双目立体视觉融合两个摄像头获得的图像并观察它们之间的差别,可以获得明显的深度感,建立特征间的对应关系,把同一空间物理点和不同图像中的映像点对应起来,这个差别,称作视差(Disparity)图像。 双目立体视觉测量方法具有效率高、精度合适、系统结构简单、成本低等优点。
机器人利用红外传感器探测蟑螂、小昆虫等生物活体。红外传感器能够感应到目标辐射物红外线,并根据红外线的物理性质来进行测量,红外传感器包括红外线发射器、接收器和信号处理器。信号处理器的信号输出端经红外线发射电路与红外线发射器连接。可采用微型单片机作为信号处理器产生编码信号,驱动红外线发射器发出带有编码信号的红外线信号,并实时检测经过放大电路处理后的反射信号,其编码信号能够保证多个相同型号的传感器同时同地工作而不相互干扰。而且工作频率一致、可靠性高、功耗小。
2.3 灰尘盒防满传感器
机器人在工作的过程中要检测集灰盒中的灰尘是否装满,在集灰盒两侧安装变介质型电容传感器。当灰尘盒中灰尘高度到达电容传感器高度时,电容传感器中的介质发生改变,由于灰尘的介电常数与空气的介电常数不同,从而引起传感器电容变化,传感器将信号传给控制系统,系统发出报警信号,提醒主人应该清理灰尘盒了。
2.4 低电量自动返回充电功能
因为做了扁平化设计,机器人所带电池容量并不大,所以就需要在电量低时自动返回充电基座进行充电再返回原位置继续工作。当电量低于限定值时,控制器会向红外线发射器发送信号,红外线发射器向四周发射红外线。充电基座安装有红外线传感器,感受到来自机器人发射来的红外线后,会向扫地机器人发射红外线。机器人内部的红外线传感器接收到后会向控制器发送信号,控制器就会控制机器人按照接受到红外线的方向找到充电基座,并自动返回进行充电。
3 结论
探讨窄缝卫生检测及清扫机器人的主要部件的结构设计并对主要的功能模块的传感器进行了介绍。机器人采用特殊的Y 型布局,并进行扁平化结构,使得机器人能完成一般的扫地机器人根据规划好的路径对地面进行常规的细屑打扫功能,还可以完成屋子里床底、柜底等窄缝位置的卫生检测及清扫。机器人的Y 型垃圾推移装置能将瓶盖、玩具零部件等垃圾推移出窄缝到指定收集点。机器人能让用户更加全面的了解家里的卫生情况,有比较广阔的应用前景。
