工业机器人工具位姿示教辅助装置研究与设计
2022-09-06莫名韶韦雅曼黄宇婧胡宁峪
莫名韶,韦雅曼,黄宇婧,胡宁峪
(南宁职业技术学院 智能制造学院,广西 南宁 530008)
0 引言
随着国民经济的发展,制造业中自动化程度不断提高,工业机器人在生产中的应用越来越普遍。在运用工业机器人作业的过程中,面对不同的工作需求,机器人的末端工具经常需要到达一些特殊的狭窄的位置,机器人的工具在自动运行过程中进出这些特定位置时应该采用直线运动的方式,以避免若使用其他运行轨迹可能会对周边物体产生碰撞的风险[1]。要实现工具的直线进出,运动轨迹编程中至少需要手动示教工具在该直线段路径两端的两个位置与姿态,这些位置点与工具姿态的精确的设定是保证工业机器人能够安全顺利完成工作任务的前提。在现有的生产操作中,这些位姿的设置只能依靠操作人员的肉眼的细心观察和娴熟的手动操作技能[2],因此,研究一种能够快速、准确的辅助定位、调姿装置,减少对工人操作技能的依赖,对减少手动操作时间、提升工作效率具有重要的实际生产意义。
1 工业机器人工具位姿示教辅助装置分析
工业机器人在实际应用中,主要以自动模式运行。在自动模式中,机器人会按照预先编写好的程序运行,带动工具及工件到达工艺流程所需的各个位置,并完成输入输出信号的交互等指令功能。在工业机器人运行的过程中,末端工具运动过程所需要到达的各个关键位置点如取放工具、工件等位置,需要在程序自动运行前通过手动操控工业机器人各关节及工具到达该位置,并对应程序位置数据进行保存,这个过程称之为机器人的示教。虽然有的机器人设备可通过专用离线编程软件生成位置点数据,但因离线仿真软件中所建模型的精度与实物误差等原因,在实际工作中,程序运行前仍需要进行关键位置的手动示教检验、校准和调整。因此,工业机器人虽是自动化程度很高的装备,但是手动操纵机器人及工具以特定姿态到达指定位置仍是必不可少的基础操作。
工业机器人运行过程中其工具所需到达的众多位置点中有的关键位置是空间相对比较狭小、进出困难易发生干涉碰撞的区域,如图1 所示为工业机器人工具所需到达某狭窄空间位置。
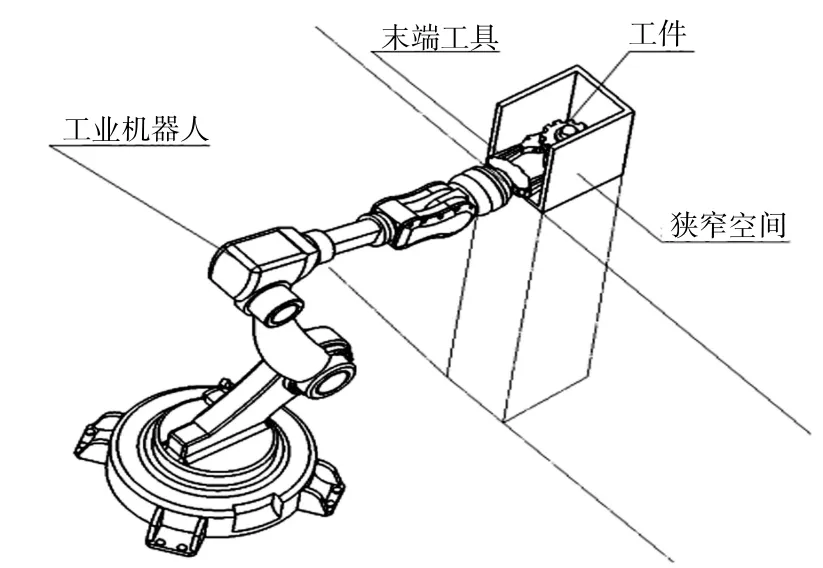
图1 工业机器人工具所需到达狭窄空间示意
实现机器人工具进出狭窄空间的常用方式:工具保持相同的姿态直线进出,如图2 所示。工具若想实现在该空间的直线进出则至少需准确设定两个关键的位置:工具夹取工件的目标位置(设定名称为Pend)和该空间的外部过渡位置(设定名称为Pmiddle),即该直线运动轨迹的两个端点。工具到达两个位置点和工具处于该位置点时姿态的准确设置非常关键,需要操作者反复切换不同的角度使用肉眼观察并依赖个人对空间位置和距离的主观判断做出手动示教的调整操纵。为了减少示教时间、提升人工对工具位置的判断效果,有必要设计和使用位姿示教辅助装置。

图2 工具直线进出狭窄空间所需设定直线轨迹示意
2 工业机器人工具位姿示教辅助装置硬件设计
根据机器人工具位姿示教直线、平行移动的需求与特点,本文设计的工具位姿示教辅助装置硬件组成部分主要有固定架、激光器安装架、激光器、电源、手动开关、红外接收模块、红外发射模块(远程开关)等组成。为了简化结构节约空间、避免导线牵引带来的不便,电源使用电池进行供电;为了增强装置的易用性、通用性,装置设置了手动开关和基于红外通信模块的远程开关,可以通过远程模块上的手动按键或输入端子连接PLC、工业机器人控制器等外部控制设备来手动或者自动远程地控制激光器的启动。本装置硬件设计框图如图3 所示。
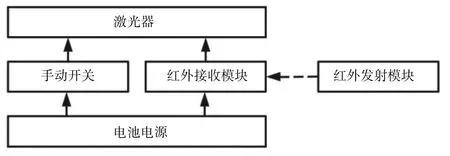
图3 辅助装置硬件设计框图
工业机器人的工具形状结构、大小功能差异较大。为了提高适应性、便于安装和使用,本装置硬件结构主要有2 种模式:(1)如图4 所示;(2)如图5 和图6 所示。
图4 是激光器集中布置在法兰安装环上的模式:安装环用于将辅助装置整体固定于工业机器人末端的法兰上;激光器安装在激光器安装架中,可通过螺钉的固定,调整安装环在机器人法兰上的角度位置,多个激光器共用一套电源及红外接收模块。该方式适用于工具外形不大,不对激光器造成阻挡的情况,也可视实际情况将圆形法兰安装环设计为其他形状,将装置固定安装于工具之上。

图4 辅助装置激光器集中安装方式
另一种模式(图5 和图6),将多个激光器分散安装于机器人工具不同位置的安装方式:每一套激光器、工作指示灯、手动开关、电源及红外接收模块集中安装在一起,通过不同形式的固定架安装于机器人的工具上,结合实际固定架可以采用不同形状如L 形、U 形、O 形等,以及不同的固定方式,如磁吸、螺钉连接、胶水黏合、扎带等方式。该方式安装更为灵活,激光器的发射的光线可不限于与机器人第五轴同向。

图5 辅助装置激光器分散安装方式

图6 分散式辅助装置安装实物图(单个)
3 工具位姿示教辅助装置的应用
低功率激光器是本装置的主要部件,它主要由激光模组(二极管)制作成笔型发射器。常用的低功率激光发射器可发射红光(650~660 nm)、绿光(532 nm)、蓝光(445~450 nm)和蓝紫光(405 nm)等,提供合适电压可直线指向地投映一个光点或光线[3]。
本工业机器人位姿示教辅助装置的应用方法示意如图7 所示。通过手动开关或控制器远程将激光器打开,则可在工具操作对象工件表面或附近物体表面上获得光点,可选择明显位置如边线、物体尖点等位置落光或者对光点投射位置做非破坏性的可擦除式标记,这些光点位置即为工具位姿的参考点。工具在不同位置、姿态处产生的多个光点位置一致,可认为它们的位置与姿态是处于相对平行的关系,在自动运行过程中使用直线移动指令则能够保证工具及姿态的平行移动。具体操作方式是:先将工具示教至在狭窄位置的内部,获取工件的Pend 位置处,微调工具姿态或者改变辅助装置的激光器位置,获得参考光点,标记光点,然后移动工具到狭窄位置的外部,利用光点,示教出Pmiddle 位置处工具位姿。机器人操作者依据两者产生光点位置的重合度判断工具运动轨迹的线性度和精度。同时也可以借助光束判断和降低工具直线运动的过程中与旁物发送干涉碰撞的可能性。

图7 示教辅助装置使用示意
4 测试
测试主要检验辅助装置在人工示教机器人工具位置和姿态的操作过程中是否能够实现预计的辅助作用,减少示教时间、避免碰撞。测试选择了40 位具有一定的工业机器人基本操作技能、水平不一的高职工业机器人技术专业一年级学生作为测试对象,设计了3 个不同的需要示教工业机器人工具直线进出狭窄空间的场景。先让学生们在没有辅助装置的条件下,完成工具位姿的示教,记录下3 次没有碰撞、成功完成取放工件任务的操作总时间,再给工具安装示教辅助装置,开启激光器使用辅助示教方式,同样记录3 次成功操作的总时间,对每个学生在这两种条件下平均耗时进行对比分析。
测试结果如图8 所示。分析测试结果显示,同一操作者成功完成同样的示教任务,在使用了示教辅助装置的情况下,平均操作耗时均得到了一定的降低,从47.9% ~ 14.6%不等,考虑到操作者个人不同的操作习惯和水平,虽然重复实践同一工作任务会有更深的理解和经验的积累,但是结合实验者对辅助装置的普遍主观好评和测试数据统计分析,可以认为该辅助装置在提升示教操作的工作效率、降低操作者劳动强度方面是能够起到积极作用的。

图8 示教辅助装置辅助效果测试
5 结语
完成了对一种以低功率激光器为主要元件的用于辅助人工对工业机器人,包括工作原理、硬件、应用方法、试验测试等的研究。其结构简洁、使用简便,通过激光产生参考光点,辅助操作者示教工具得到平行位姿,为工具直线运动提供良好基础,既可以应用于工业生产中,提升示教效果,也可以应用于高校、职校学生实训及企业员工实操培训中,减少碰撞保障人员和设备安全[4]。
另外,可在机器视觉自动比对参考光点等图形图像、获取机器人内部位姿数据、自动反馈结果等方面开展进一步的研究和实践,进一步提升人工辅助示教的精度和易用性,提升装置的自动化和智能化水平,并结合成本控制需求与经济效益价值,不断完善设计方案。
