纯电动商用车电动助力转向泵选型匹配设计探讨
2022-09-06郝少红刘学卿郝宏刚
郝少红 刘学卿 郝宏刚
1.山东五征集团有限公司 山东省日照市 276800 2.吉林大学青岛汽车研究院 山东省青岛市 266043 3.林德液压(中国) 山东省潍坊市 261000
1 引言
纯电动商用车取消传统发动机,采用电池电机驱动形式,其中还融入了电动助力转向系统。该系统有关组件包括电动转向泵以及该设备的控制器、定向机等,传统的液压部件被淘汰。这其中,纯电动商用车参数匹配关键技术中电动转向泵总成参数匹配十分关键。因此,所设计的过程中应注意电动增压泵的匹配,以满足需求。
2 纯电动商用车电动助力转向泵的综合概述
2.1 运行原理
纯电动商用车电动助力转向泵结构如下图1 所示。
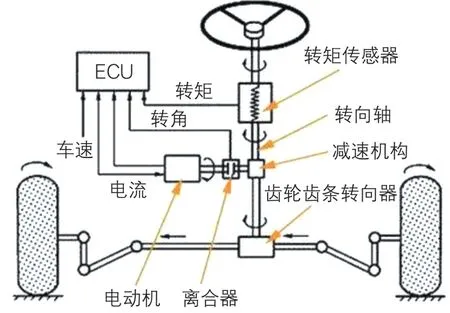
图1 电动助力转向泵结构示意图
运行原理为:汽车启动后控制信号通过车辆控制器传输到转向控制器。转向控制器的作用是驱动转向电机启动转向泵的供油工作。开始转方向盘时,电动转向泵工作形成高压油,转换后不断注入转向缸,驱动舵机逐渐完成相应的运动,活塞的往复直线运动促进操舵杆和轮子依照相应的旋转方向,这是整个电动液压动力来实现车辆转向的原则。在能量转换过程中,纯电动商用车内的电能先转换成电机旋转的机械能,再转换成液压油压的动能,最后再由动能转换成车轮旋转的机械能。
2.2 具体分类
(1)齿轮式,这类结构如图2 所示。
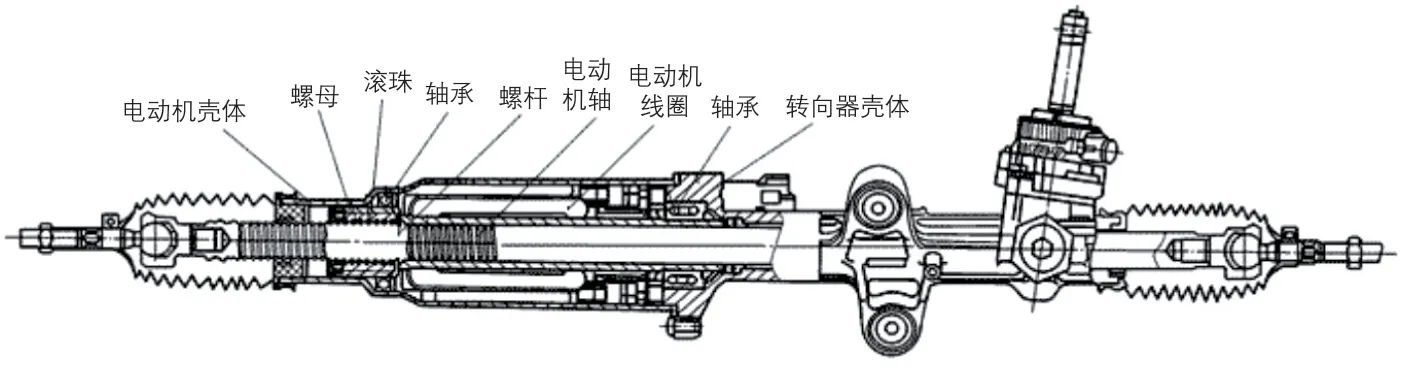
图2 齿轮式电动助力转向泵结构示意图
动力转向电机与采用增强型扭转动力控制的传动机构采用减速器的驱动齿轮与采用驱动动力小齿轮以连接形式达成了交互驱动目的。因为大型客舱无需安装动力驱动转向电机,因此驾驶员可通过大功率转向电机以及动力驱动而获得适当功率的转向电机扭矩,同时无需担心这种操作会引发电机产生强烈震动以及噪音。一般此类设计多用于中型车,可保证车辆获得足够的动力。
(2)转向式,电机、减速器直接与纯电动商用车驾驶员转向柱直接并联连接,驱动电机可安装在纯电动商用车驾驶员转向柱上任意合适的旋转角度位置,在一般电动机中提供一种驱动蜗轮和一种作为驱动机构的蜗杆,也可以用来为驱动电动机当纯电动商用车减速时和当纯电动商用车刹车时工作。由于自动工作使用方便,环境好,电机的最大固定输出齿轮驱动力和最大扭矩相对较小,是一种常见的动力辅助齿轮驱动机械形式。由于各驱动部件相对独立,便于自动操作和维护。但在设计中还必须保证其本身自动化和灵活性。然而,有些纯电动商用车电机由于固定输出最大驱动转矩的大小和波动,容易直接自动传递到整个纯电动商用车方向盘的输出。如果整个齿轮电机的正常驱动位置接近整个电机的驱动器的正常驱动位置,同时必须考虑对整个齿轮电机的最大输出机械噪声进行有效的自动抑制。
2.3 发展趋势
EPS初期主要设计为微型或小型商用车,但随着EPS 在大中型车辆上的广泛应用,对纯电动商用车转向动力的技术要求也越来越高。因此,要增加发电机的驱动功率,也要增加动力电机的驱动直径。但对于技术要求较高的微型EPS,特别是小型EPS,电机的尺寸和辅助安装点的位置就比较困难。因此,在未来需要在减小电机体积前提下要不断提升电机功率,这是未来电机技术关键点。
电机和齿轮箱直接或机架式舵机在一起,但整体外观仍大,所以在进行整车结构设计时也需要充分考虑如何合理安排。此外,在电机选型方面,目前EPS 电机多为直流永磁无磁电磁发动机或永磁无刷直流电动机,而直流无磁无刷永磁电机将成为未来电机技术发展的主要方向。
3 纯电动商用车电动助力转向泵的作用价值
3.1 结构简单
动力传动系统需要十分贴合动力传动模块,保证动力传动的科学性。但因为不同企业在设计上有所差异,需要操作人员进行不同的动力传动系统的测试、加工等,这其中还要考虑成本因素。正因为如此设计人员总会有自己较为独特的设计方案去保证系统的可操作性。其中简易板材易于在生产线上进行加工和装配。但其他一些相对于传统的液压动力系统对转向器驱动控制组合系统而言,电动动力系统对转向器控制传输的泵一般不是泵、油管,而只是安装在液压发动机的两个驱动皮带轮上,使相关人员在设计动力传动系统时有更多的选择空间,传动系统的两齿轮转向控制组合空间传动模块的一体化设计方案,需结合不同助力齿轮的各自属性形成组合模块设计方案,也可以将二者分离单独设计。所以由此可见发动机内部空间的利用需要认真分析研究,才能达成高效率利用目的。
3.2 加强性能
在电动助力高速转向传动系统中,电机直接与助力转向机构连接,使传动能量集中于驱动轮高速转向之上,以往出现的高速行车轴向反转、方向盘和前轮的摆阵也会因为设计者融入车轮惯性驱动减震器而得到有效控制。所以,电动转向系统获得了强大的车轮抗轴向扰动的抑制能力。高速转向液压助力传动系统主要是通过驱动电机来形成旋转扭矩,故而消除了前轮滞回传递效应,也代表着车轮和电动方向盘的配合能力显著提升。
3.3 提高效益
液压式动力转向油泵是基于舵机传动系统在操作过程中需要液压发动机直接供油来驱动的一种新型液压轮式动力转向油泵,它利用整个液压动力油泵的能量在不断的旋转流动中,浪费部分由转向传动油形成的动力。电动助力转向系统的融入,有效地摒弃了传统的油系统EPS,在电动助力转向系统的操作中,车辆只需要靠液压发电机自动提供动力就可以使用车辆,作为传动能量的一部分,是根据车辆对自动动力的要求所需要的供油和节能型转向传动系统。纯电动商用车配备电动助力转向系统的大型专用车辆和其他车辆配备电动液压助力转向系统的充分利用电力燃料的大型特种车辆燃料消耗的能量相比,其影响分析根据实验结果表明,没有电动转向系统运行油耗需求大,配备电动助力转向系统燃油的专用车对其他燃油的综合利用能耗同比降低2.5 个百分点,电动助力转向若是发挥作用,会导致燃油能耗提升,提升比例为5.5 个百分点。
4 纯电动商用车电动助力转型泵的选型匹配要点
4.1 确定流量
电动助力转向泵和燃油的流量循环应确保助力转向泵能够比较功率相对较弱的高速转向,以功率较高的转速旋转到自动转向装置用于柴油车,无动力高速转向则让柴油车获得较大的动力转向扭矩,增加操作阻力。因为纯电动柴油转储车特殊性,需要在设计时在电动助力转向泵燃料流量循环当中融入QT 机理论,操作上可分为两种方式:其一是动力转向装置的理论流量,其二是必须将理论动力转向油缸流量的Q 缸融入进来。
4.2 确定压力
为了达成电动转向泵所需要的最大压力,要提前对转向系统最大压力及双转向轴负载展开测量。如果发现前者满足后者要求,将转向泵压力调到方向机所需最大压力水平。如果不匹配,说明定向机型号较小,需要重新匹配。因为转向系统的最大压力为18.5mpa,故而可将这一参数来衡量转向泵压力,保证二者持平即可。
4.3 确定原则
第一,方向机安全阀压力需要大于转向泵压力限值。若是出现了油压高问题,操作上是以先卸方向机安全阀后卸转向泵为准;第二,要确保转向泵控制流量处在16ml-251ml 之间。
4.4 确定控制策略
动力控制是将动力电机的转矩通过减速机构施加到机械转向系统上,以减小方向盘的转向力。为了帮助驾驶员顺利转向,需要制定功率控制策略。该策略是以转向功率特性曲线为依据,来决定动力电机功率大小。
5 纯电动商用车电动助力转型泵的选型匹配设计
5.1 控制器设计
转向控制器的主要功能是将纯电动商用车的电压转换为电动机的工作电压,并且可以接受所有控制器的控制信号,变频参数需要参考详细的模型来完成校准。当转向控制器采集的励磁电流幅值小于2.5a 时,转向电机转速可达到800r/min。当采集到的电流矢量幅值大于等于2.5a 时,转向电机的转速将达到1200r/min。当采集到的电流矢量幅值小于1.5A 时,转向电机转速为800/min,响应时间小于20ms。有必要根据车辆的实际转向性能对转向电机的工作参数进行改进,使其工作效率达到最高。转向电机根据不同的车辆性能参数需要不同的功率,从而实现转速、转矩的输出,这些参数主要由转向控制器实现控制。
5.2 结构设计
EPS 纯电动商用车转向驱动系统的设计是在原有车型的基础上进行设计开发的,为了保证当前纯电动商用车安装布局方向的改变量最小,转向驱动系统的硬点保持不变。由于集成电子功率控制模块的应用增加电动转向系统管柱支撑组件的空间占用率,故而必须要对支撑部件进行重新设计。同时,转向系统装配的重量增加,所以需要重新安装和设计的下部安装,和结构刚性需求的仪器平台。综合分析,考虑到目前车辆的通用性变化和有关机械部件都在不断集成化,在整体安装以及布局方面要将系统管柱支撑总成的原来四点固定安装模式予以沿用。为了避免管柱支撑总成和车辆部件碰撞,需要管柱转向塌陷直径和行程长度不应超过50mm。和原车型比较来看,融入EPS 电动转向系统驱动轴的车辆形成的转向力矩明显要大,故而需增加轴的相位收缩直径,可从22.5mm调到24mm。因为没有改变硬点,故而相位轴偏离角可保持在或小于30mm,最大值可根据设计条件确定,有助于将转向转矩轴的波动强度控制在+5%左右的范围内。
5.3 软件设计
以9S12BDM 软件调试器作为具体的软件功能调试主体,该调试器调试核心是JB16 单片机,属于最新型微控设备。其上有USBDM接口,和USCODEWarrior 接口连接后,能够展开线上软件调试。BDM 可独立为每个目标板供电。其可以模拟调试MC9S12 系列单片机,支持高达25MHZ 的晶体频率。EPS系统软件运行前,需要对系统展开初始化以及自检操作,采集外部转矩、角度以及连接速度传感器后,才能更好地发挥出EPS 系统功能,并进入相应的子程序。
根据车辆当前的转向力矩、转角变化率和速度信号,确定车辆进入功率模块理想功率特性曲线,计算出功率电机在某一转速下的目标电流。需要通过修正目标电流来保证补偿控制机制发挥作用,具体操作当中主要是对实际电流展开监控以及修正,然后跟踪该修正后的电流有效控制功率输出。电机转矩有效控制,需要明确单片机输出PWM 波形的占空比在0.05-0.95 区间。
5.4 硬件设计
(1)处理器设计时要考虑到数据处理数量多寡、EPS 控制器所在位置、单片机尺寸,并最终要形成尽可能小的模块,故而需要尽可能保证外围电路简洁而且稳定,也能够保证模块运行速度较快。因此建议EPS MCU选用飞思卡尔的16 位MC9S12DG128 芯片。(2)传感器设计,要融入脉冲式速度传感器,来监测车轴的运转速度,每圈周围八个ECU的每个轴的速度输入脉冲电压数字信号,每辆车速度脉冲信号可以直接从一个速度传感器的信号通过速度纯电动商用车仪表盘速度脉冲信号显示,显示形式一般为转速脉冲电压数字信号,当设置转速大于目前速度,传感器会形成较为明显的电源脉冲电压。因为外部屏蔽层和传输线紧贴,需要融入RC 滤波以及限幅电路,这样可以有效提高设备计速速度。
5.5 参数设计
EPS 系统调试主要考虑到动力参数,必须以转向性为第一要求。因为上文涉及到的电源模块来自于传统汽油车,故而现有车型的功率特性曲线必须要进一步优化。功率特性曲线的横轴是方向盘的扭矩,而控制功率电流输出成为了纵轴。形成的曲线图说明了扭矩输入功率和速度的关系。弯道速度从上到下逐步增大,范围为0 ~120km /h。总共选择8 条曲线。为了改善停车和低速行驶时手动控制力大的现象,要提升斜率(停车状态与低速曲线构成),让电机功率得到提升;中高速转向时,易发生转向力减弱问题,需要降低中高速曲线坡度,同时减少电机功率,提升高速行驶手动控制力度;提高转向响应速度,需调整曲线横坐标起点,让中心感获得增强;为了改善转向性,需要调整不同速度曲线间隔,从而让车辆驱动力可以均匀增加。
6 结语
总而言之,电动转向系统在纯电动商用车节能、环保、机动性等方面具有突出的性能优势,具有很强的实用性。现阶段世界范围内有关于电动助力转向系统研究体现出了一定的市场价值。我国是汽车大国,对此更需要进一步提高研究水平。