SLAM技术在办公用房面积测量中的应用
2022-09-03孔维旺
孔维旺,郭 丹
(兰州市勘察测绘研究院,甘肃 兰州 730030)
1 S LA M技术简介
SLAM是simultaneous localization and mapping的缩写,译为“实时同步定位与地图构建”。该技术可以理解为:测量设备在一空间内任一位置开始移动,移动过程中通过发射激光,由周围环境反射后回归测量设备,从而实现对自身及周围环境的定位,同时在此基础上构造增量式三维地图框架,实现测量设备自主定位和导航的过程,SLAM技术原理如图1所示。

图1 SLAM技术原理
GeoSLAM Horizon手持式移动三维激光扫描仪如图2所示,是目前最轻便的SLAM扫描设备,一套设备一个背包就可以全部装下,其测程相对较远、点密度较高,最大的特点是无需依赖GNSS定位系统,且搭载平台模式非常灵活。

图2 GeoSLAM Horizon扫描仪
现阶段常见的三维扫描设备基本都依赖于全球卫星导航系统(GNSS)和惯性导航系统进行定位,只能适用于室外和露天环境扫描,无法满足在封闭无卫星信号的环境中连续作业。架站式三维激光扫描仪可不依赖GPS辅助定位,但用于复杂空间扫描时需要大量换站,数据处理时按测站进行点云拼接,效率较低。Geo⁃SLAM Horizon扫描仪可在封闭空间进行移动扫描,完全不依托卫星定位系统辅助定位,能够在室内复杂环境下连续进行扫描,对工作环境有极强的适应性,可在无光线环境下正常工作,可以实现24 h不间断作业,在复杂空间、异形构造、房屋室内测量等工作中具有事半功倍的效果。
2 S LA M技术应用
2.1 作业区概述
兰州市第七中学始建于1944年,位于城关区定西路266号,2000年被市政府命名为“542”工程示范性中学,占地面积约44亩,建筑面积约10 500 m2,属市级管理中学之一。学校建成年代久远,建筑图纸已无从收集,且经过多次装修、分割、合并等改造,内部形状已发生很大变化,墙体厚度测量难度很大。部分房屋内墙装修为不规则、不平行、不垂直的异形结构;房屋内靠墙多放置有档案柜,柜顶接近房顶;地下室仓库多放置废弃的桌椅,视线多有阻碍,此环境下使用传统的钢尺或测距仪等工具测量时作业难度极大、效率极低,还容易出现量了尺寸画不出图形的情况。GeoSLAM Hori⁃zon手持式移动三维激光扫描仪,不受上述困难因素影响,能够高效、高质量解决此难题。
2.2 作业流程
本次办公用房测绘项目主要工作内容为:建筑物平面分布图测绘、分层平面图测绘、房屋面积计算等。其中,平面分布图可采用已有地形图编绘制图,无需外业实测,本项目主要外业工作为利用三维激光扫描的方式获取房屋内部尺寸,进而计算房屋面积,具体作业流程如图3所示。

图3 作业流程
2.2.1 作业准备
(1)硬件设备
本项目采用的硬件设备主要有Laica GS-14型GNSS接收机、手持式测距仪、GeoSLAM Horizon手持移动扫描仪,扫描仪基本参数见表1所列。

表1 GeoSLAM Horizon扫描仪基本参数
GeoSLAM Horizon手持移动扫描仪的优势还有:在移动过程中,激光头360°旋转扫描,沿移动路径球状维度发射激光,实现实时全景扫描,达到目光所见均可测量的目标,保证数据采集的完整性;电源为可拆卸90 WH的锂电池,充电快速便捷,通过更换电池可实现24 h不间断扫描;可搭配鱼眼相机,拍摄扫描全程影像,并将点云、扫描轨迹、影像进行叠加,点击任意轨迹位置可自动调取该点影像数据,达到现场重现效果;结构设计小巧,可在狭小空间内使用自如。
(2)软件设备
本项目采用的软件设备主要有:CloudCompare和EPS-地理信息工作站。
CloudCompare是三维点云编辑和处理软件,其主要功能有:配准、重采样(过滤)、交互式或自动分割,以及显示增强等。
EPS-地理信息工作站的三维测图模块用于点云测图,不动产测量模块可用于房屋分层平面图的制作,通过编制脚本工具可实现面积计算和房屋功能标注工作。
(3)控制点布设
控制点按图根级别进行布设,用于点云数据配准至测量坐标系,并与地形图套合,进行分层平面图的生产。在校园内操场周边空旷位置布设4个图根级别控制点,利用LZCORS系统,采用网络RTK技术,按1∶500地形图测绘标准施测,网络RTK测量技术要求见表2所列。
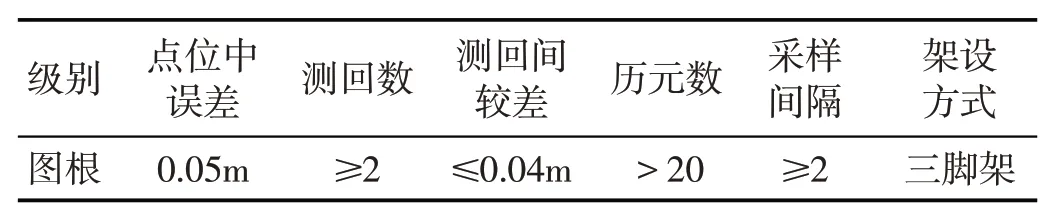
表2 网络RTK测量技术要求
(4)扫描路线规划
因SLAM定位精度会随扫描时间和移动距离的增加产生微小衰减,故每一测段扫描路线不宜太长,通常应控制在25 min之内,因此开始扫描之前,依据建筑物层数、内部布局、楼梯位置等,规划扫描路线,最好形成闭合路线或附合路线。
2.2.2 三维扫描
因点云数据需配准至测量坐标系,首先需观测图根控制点。扫描仪底部安装有基准板,将基准板上标志中心对准图根点后开机,静置10S以上,再平稳移动至下一图根点上同样方式静置10S以上,图根点观测完成后进入建筑物,在楼梯位置设置一标记,安置扫描仪静置10S以上,然后沿楼道逐个房间进行扫描,行走过程要平稳不得有大幅度抖动。
为了提高扫描精度,在每层楼梯位置均设置了标记点,每层扫描完成后均回到标记点,对扫描仪重新初始化,再进行下一层的扫描,一幢建筑物扫描完成后再回到图根点上,按开始扫描前的相同的方式进行观测。
2.2.3 点云数据处理
该扫描仪数据下载极其便捷,扫描完成后只需连接USB存储设备即可实现自助传输。导出的原始数据为“日期+扫描完成时间”命名的文件,将该数据导入预处理软件Hub里进行解算,该软件可以查看点云3D效果,也可按2D显示。多段采集的数据需利用相邻段之间的公共区域进行拼接,形成完整的测区三维点云模型,并导入图根控制点坐标信息,将模型配准至测量坐标系。解算完成后可输出通用.las格式数据。
为了方便后续点云测图,点云数据还需进行剔除无用数据、点云二次重采样(抽稀)等工作,采用Cloud⁃Compare软件进行优化处理,将导出的.las格式数据用CloudCompare软件打开,选中要处理的点云数据,先使用Cross Section工具进行点云分割,用“包围盒”提取所需数据,输出为一个新的点云数据文件,点云分割步骤如图4所示。

图4 点云分割步骤
因原始点云数据量非常多,点云并非越多质量越高,而是越集中可靠性越强,且数量太多会影响测图软件中的显示,造成卡顿现象,一般需对点云数据进行抽稀等优化处理。CloudCompare软件的二次采样功能下按需求设置参数即可实现点云抽稀,以初中部一幢5层建筑物为例,原始点云数据有2.66亿个之多,经过分割和优化处理后只有1亿个,测图软件中显示非常流畅,明显提高了测图效率。点云二次采样工具如图5所示。
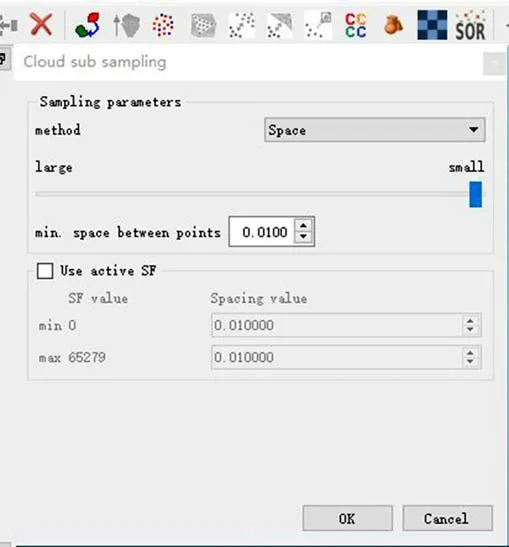
图5 点云二次采样工具
经过以上优化处理后的点云数据,可导入点云测图软件进行绘图,点云优化处理前后效果如图6所示。
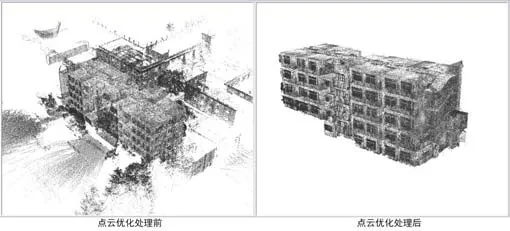
图6 点云优化处理前后效果
2.2.4 点云测图
点云测图采用清华山维EPS-地理信息工作站的三维测图模块进行,利用软件自带工具将.las格式数据转换为.pcd格式后加载该数据进行测图作业。
本项目需逐层绘制,点云模型正视为多层叠加显示,因此需要使用“剖面与投影”功能,打开工具后将投影设置为透视,勾选启用剖面,视点坐标中输入需要采集的楼层高度,前半、后半厚度之和为点云可视厚度,经测试厚度为10 cm时测图效果最佳。测图过程中可通过“Ctrl+鼠标滚轮”随时调整视点高度,调整至点云轨迹最清晰时沿轨迹绘制房屋分层草图如图7所示,同一房间内视点高度变化不宜过大。

图7 房屋分层草图绘制
2.2.5 房屋分层平面图绘制
利用EPS不动产生产模块,在地形图基础上创建分层平铺图,再将点云采集的房屋分层草图导入、构面。再利用“面积块信息录入”工具依次录入房间功能、房间号、门牌名称等信息,信息录入如图8所示。

图8 信息录入
信息录入完成后即可输出分层成果图,再利用“面积计算及属性提取”脚本计算、标注各类面积和属性注记,经图面整饰后打印为PDF格式成果图,并输出面积统计表格。“面积计算及属性提取”脚本如图9所示,分层平面图如图10所示。

图9“面积计算及属性提取”脚本
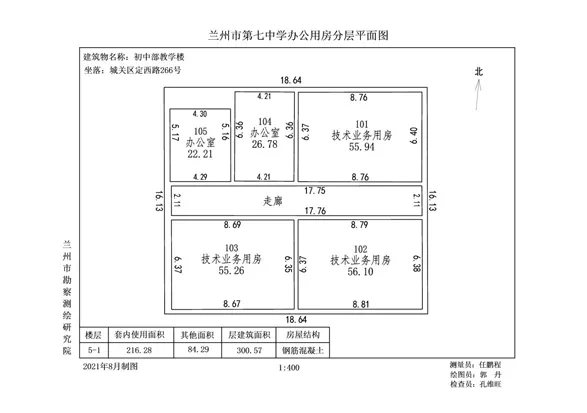
图10 分层平面图
2.3 精度检测
本项目规定边长测量误差应不大于3 cm,点云测图完成后,利用手持测距仪随机量取了23条边长对点云模型进行了边长精度检测,见表3所列。由表3中数据可见,检测边长较差最小值为0 cm,最大值为3 cm,均未超限,且较差达到3 cm的只有4条边,由此可以看出点云模型数学精度良好,成果可靠。

表3 边长精度检测
3 结束语
办公用房测绘项目同批次共涉及26所学校,经与其余使用手持测距仪施测的学校对比,使用GeoSLAM Horizon手持移动扫描仪进行测量工作效率至少提高4倍以上,尤其在室内复杂环境、弧形及其他不规则异形结构的建筑物测量上优势非常明显,既节约了时间,成果精度也得到了保障。本论述通过SLAM技术在办公用房面积测量中的应用以及与主流测绘软件之间流畅的衔接配合,验证了该技术在测绘项目中的可行性,进而推断SLAM技术在测绘领域的发展前景非常广阔。
