动车组智能检测机器人新模式探讨
2022-09-03邱晓欢周金龙
邱晓欢 周金龙
(1.广州铁路职业技术学院 2.中国铁路广州局集团有限公司广州动车段)
0 引言
2021年,中国大陆共有10条/段高速铁路开通运营,合计里程2139.54公里,车站68座,包括深汕铁路、哈伊高铁铁力至伊春段先行工程、西安至安康高速铁路、沪渝蓉沿江高铁(武汉至宜昌段)、西十高铁湖北段、兰州至合作铁路、珠肇高铁江门至珠三角枢纽机场段、集大原高铁、西十高铁陕西段9条/段开工建设,合计1461.32公里。在“十四五”期间,中国高速铁路迎来重要发展阶段。
伴随国家高铁网络的日益扩大,动车组的大规模运营给检修带来前所未有的挑战。动车组检修工作大多在晚上进行,检修工作强度非常大。检修人员的工作时间长,对检修人员的数量、经验、精力、体力要求极高。
国内目前已有多家机构和企业对动车组智能检测机器人进行研究及示范应用,本文尝试对该系统现有运行模式进行总结并提出新模式以供探讨。
1 现有模式分析
(1)RGV搭载车底板快速扫描模块及转向架精扫模块
目前在各单位投入测试的动车组智能检测机器人系统以该模式为主。
系统组成包括:RGV运载平台、RGV走行铁轨、RGV定位装置、多自由度机械臂、成像模块(其中转向架精扫模块搭载于机械臂末端,车底板快速扫描模块搭载于RGV运载平台本体之上)、网络传输设备及识别服务器设备。系统前端设备负责对进入检修库的车辆车底各关键部件进行图像信息采集,其中转向架精扫模块负责转向架上各关键部件检测项点的拍摄,车底板快速扫描模块负责车底板的扫描成像;网络传输设备负责将前端设备获取的转向架关键部件及车底板各图像信息进行无线传输;识别服务器设备负责将检测过程中采集的图像进行处理,并判别车底各关键部件是否存在故障。
存在不足:系统使用铁轨作为机器人的走行平台,利于机器人的走行控制却也带来极大的弊端。车辆检修单位由于车辆清洁需求,日常会有大量带腐蚀性的液体流入检修沟,安装于检修沟中的铁轨一侧极易产生污水赃物滞留(见图1),铁轨长期处于此环境下,会快速锈蚀,铁轨锈蚀后极不利于机器人的行走定位停靠,在厂家不具备前端设备二次定位进行拍照姿态调整的能力下,机器人下一步的图像采集及图像分析工作会受到极大影响,更有甚者会发生机械臂末端成像单元与车体发生撞击的风险。

图1 动车组检修沟铁轨锈蚀严重
(2)无轨AGV搭载车底板快速扫描模块及转向架精扫模块
目前少量厂家在尝试此种模式。
系统组成包括:该模式系统组成与模式一系统组成大体接近,不同点在于AGV采用激光雷达导航技术实现在检修沟内无轨行走控制,并在激光距离传感器等车轴定位模块指引下实现转向架单元特定位置处停靠。在AGV行进过程中,AGV本体上所搭载的车底板快速扫描装置对车底板进行扫描成像。在AGV完成车底板扫描后AGV返回并依次停靠于各转向架底部关键位置,其后AGV上搭载的机械臂及末端成像单元根据示教路径开始执行转向架单元关键部件图像信息采集。
存在不足:由于检修沟地面平整性差,且检修车辆在检修沟上的停靠位置非绝对固定,AGV上搭载的车底板快扫模块及其他感应装置与检修车辆的空间位置相对关系处于非恒定及难以追踪状态,且由于AGV本体在行进过程中会发生垂直方向上震动及行进方向上打滑,AGV上携载的线扫模块行进距离测量模块数据失准,在此条件下通过快扫模块得到的车底板图像畸变将非常严重,并在相当大程度上影响车底板缺陷判定工作的准确性。转向架单元关键部件的图像信息采集及分析工作也将面临比模式一更大的挑战。
2 新模式探讨
在保证技术可靠的前提下,为追求建设成本更具优势的系统方案,本课题组提出的新模式为:无轨AGV配合轨边系统组合应用。
系统组成:本系统由负责转向架关键部件、车辆特定位置图像信息采集的AGV装置及负责车底板图像信息采集的轨边系统组成,其中无轨AGV搭载柔性机械臂与成像单元(安装于机械臂末端)在检修沟中运行,根据转向架及车辆特定位置检测项点分布情况,AGV在各个转向架底部及车辆特定位置依次停靠,在进行AGV与转向架单元及特定位置空间关系解算后,系统自动调整机械臂系列动作中各姿态关键参数,保证末端成像单元按照预定拍照距离及角度对各项点进行图像信息采集并通过点对点无线传输网络将收集到的图像信息传送至后台图像识别服务器;轨边系统由布置于列车走行钢轨底部的成像单元及轨旁的车号识别模块组成,当检修车辆从该装置上部经过时,成像单元自动触发并开始执行拍照任务,在整列车通过后,系统将所采集到的车底板图像进行拼接并将完整图像通过网络系统传送至识别服务器进行车底板缺陷故障判定。
系统优势:无轨AGV配合枕边系统的组合应用,一方面保证车辆图像信息(转向架信息、车辆特定位置信息及车底板信息)得到完整有效采集;另一方面由于车底板扫描模块安装于车辆入库咽喉位置,所有入库检修车辆车底板图像信息均可通过该套装置完成采集,无须在每台移动设备上安装一套线扫模块(只可对停靠在相应检修沟的车辆进行车底板图像信息采集),可在很大程度上减少系统建设成本。
以单检修库六台机器人配置系统分析示意如图2、图3所示。
其中,有轨机器人模式系统包含:
1)六套转向架精扫模块(安装于机械臂末端);

图2 有轨机器人模式示意
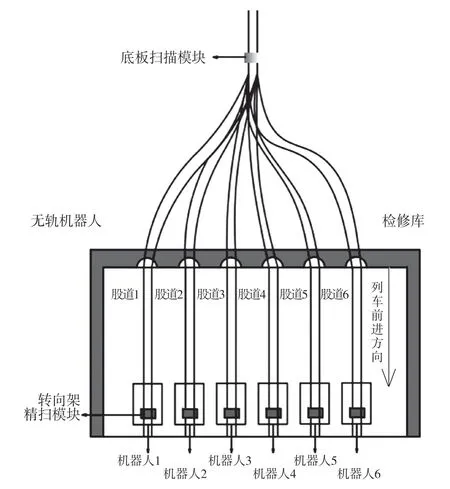
图3 无轨机器人新模式示意
2)六套底板扫描模块;
3)六套带高精度齿条的机器人行走轨。
无轨机器人新模式系统包含:
1)六套转向架精扫模块(安装于机械臂末端);
2)一套底板扫描模块(安装于车辆入库咽喉位置处)。
通过上述示意描述可见,无轨机器人新模式优势明显。
3 结束语
动车组智能检测机器人系统作为车辆智能运维基础感知层重要信息入口,可全方位进行动车组信息感知和智能管控。系统依托动车组结构化数据,可从时间、空间和状态三个维度在动车组健康状态网络上生成其潜在状态轨迹路径集描述,为动车组检修及修程修制改革提供重要数据依据。为促使该生态往更良性方向发展,设备研发企业与车辆运营单位合力优化设备形态极为关键,也将成为重要课题。
