基于合成孔径雷达的船舶尾流成像仿真
2022-09-02张杰马元魁张建生薛鹏翔
张杰,马元魁,张建生,薛鹏翔
(西安工业大学,陕西西安 710021)
合成孔径雷达(Synthetic Aperture Radar,SAR)作为一种使用微波频段的雷达,其基本工作原理是发射某特定频率的电磁波,然后接收到回波信号,由于在该回波信号中带有幅度和相位信息。通过解析回波信号,获取海面后向散射强度信息,这些后向散射信息以图像形式来显示,可以获取海面反向散射强度的雷达图像,它在海洋学中的重要用途之一是对海上船只的探测,这对于海上经济和军事活动非常重要[1]。船舶尾流反演研究的前提是研究尾流形态分布,需要获得舰船尾流的SAR 图像特征,研究雷达参数、船体类型及其运动参数和海洋环境参数等[2]。
中国科学院电子学研究所的王爱明等人[3],将分布式表面成像模型和基尔霍夫近似散射模型用于模拟极化SAR 轨迹成像过程,并提供了相应的轨迹图像,重点研究的是关于复合表面模型和速度成束调制机制,其关注点是建立尾流模型,未呈现仿真的具体实现过程。2006 年,徐世昌等人[4]利用流体动力学基本方程分析并获得了潜艇在航行中产生的尾流(湍流尾流和内波尾流)的变化特征。同样该课题组没有提供检测到的图像和结果。
1 SAR成像模拟
SAR 在飞机负载飞行过程中发射LFM 信号,遇到目标物体后反射的信号用作回波信号。回波信号的数学模型是研究合成孔径雷达成像算法的基础[5]。
SAR 接收器接收到回波信号后,首先需要经过距离向脉冲压缩的操作,SAR 发射信号的带宽决定了该雷达距离的分辨率大小:

式中,c表示光速,Br表示SAR 发射信号的带宽,ρr表示SAR 距离的分辨率。在方位向需要处理的是回波信号的孔径合成,SAR 方位向多谱勒带宽决定SAR 方位分辨率:

式中,va是载有SAR 的平台在方位向的速度,ρa为SAR 的方位分辨率,Ba为SAR 方位向多谱勒带宽[6-7]。
SAR 的方位分辨率表达式为:

其中,D所表示方位向合成孔径长度。
目标与SAR 平台斜距关系可近似写为:

其中,P点为SAR 平台的位置矢量,设其坐标为(x,y,z);r表示检测目标与合成孔径雷达之间的垂直斜距,T点为目标的位置矢量,x=v·s,其中s是慢时间变量,v是载有SAR 的平台速度,R(s;r)表示目标在任意时刻s与雷达之间的斜距。梯度范围是s和r的函数,不同目标对应不同的r,在目标距离雷达较远的情况下,则在观察带内,r可以认为几乎没有变化,即r=R0。
载有合成孔径雷达的平台在飞行过程中按照一定的周期发射脉冲信号并接收回波信号,其过程如图1 所示。发射机以τl的时间发射脉冲信号,然后转化天线用于接收回波信号。

图1 雷达发射脉冲串的时序
当雷达未处于发射状态时,它接收反射的回波。采用卫星平台搭载SAR 时,其探测目标到卫星平台距离太远,部分回波信号的接收需要6~10 个脉冲间隔。使用飞机搭载SAR 时,可以实现在脉冲传输间隔内接收每个回波。
在接收回波信号的序列中,τn=表示在发射第i个脉冲时目标回波相对于发射序列的延时。SAR 发射序列的公式如式(5)所示:

式中,rect(·)为矩形信号,Kr为距离向的chirp信号调频率,fc为载频。sar 回波信号由斜距、目标RCS、天线方向图、发射信号波形、环境等因素共同决定,τn表示SAR 发射第n个脉冲信号时,SAR 再次接收到电磁波的延时,且τn=,探测目标回波信号的模型如式(6)所示:
式中,exp[jπKr(t-n·PRT-2R(s;r)/c)2]是chirp 分量,该参数决定了距离向的分辨率;为多普勒分量,决定方位向分辨率。脉冲的回波信号表达式为式(7)所示:

2 距离徙动校正
在合成孔径的过程中,雷达与目标之间的倾斜距离超过了距离分辨率单位,因此来自同一目标的回波信号被分布在距离范围内的不同距离单位内,从而导致信号在方位角和距离上耦合[8]。在SAR 仿真过程中,影响仿真结果的主要因素是距离偏移。由于SAR 中距离和多普勒频移的耦合,瞬时斜率范围将发生变化,这种变化称为距离徙动。RCM 使信号处理变得复杂,但这是SAR 的固有功能,正是这种随时间的倾斜距离变化使得方位信号具有调频特性,但是如果不校正距离偏移,则会导致成像分辨率降低,尤其是距离分辨率的降低。为了将成像过程中需要进行的二维移位过程变为两个一维移位不变过程,必须使用距离徙动校正,以去除距离向、方位向存在的耦合。为了将距离偏移曲线的路径校正为与方位向平行的直线,要求精度必须在单个合成孔径时间,并且其倾斜距离的变化小于距离分辨单位的一半。
距离徙动及校正中,目标与雷达的瞬时距离为R(s;r),R(s;r)=,根据泰勒级数展开可得:

由式(8)可知,某个慢时间有对应的R(s;r),存储来自同一目标的回波时,其结果不在同一直线上,而且具有距离徙动。因此距离徙动量为:

为了压缩方位向,必须校正距离徙动量ΔR(s,r),使其回波数据在同一条直线上。由式(9)得到,最短距离是不同的。由于距离r对应于不同的ΔR(s,r),因此在时域中处理距离移动较为复杂。因此,该新域也称为距离多普勒域,因为傅立叶变换是对方位向执行的,距离向没有进行傅里叶变换,并且新区域在方位向为多普勒频率。
当斜距R为多普勒fa的函数时,即R(fa,r),关于最近距离r的探测目标P,回波fa是倾斜角θ的函数,即fa=,斜距R(fa,r)=,即:

所以距离多普勒域中的距离徙动为:

由于慢时间的变化不会影响距离徙动,并且相同的距离徙动可以对应有相同的最短距离。校正距离徙动的前提是获得距离徙动的移动值,距离徙动单元可表示为。
所有存储单元是离散的,故只需移动存储单元即可获得准确的值。通常需要插值操作才能获得准确的徙动校正值。
3 船舶尾流SAR成像仿真
船舶尾流SAR 成像仿真参数如表1 所示。

表1 仿真参数
仿真过程中载波频率选取C 波段,目前欧空局装备的哨兵系列采用该波段并获得了清晰的图像,频率带宽采用目前国内外常见的100~600 MHz 频段,为减少计算机运算时间,选取150 MHz 作为仿真参数,场景区域范围为150 km×150 km,该仿真采用机载方式,飞行高度为3 000 m 左右,以美国全球鹰无人机为例,巡航行速度150 m/s 左右。
将简单点目标SAR 成像仿真技术与原理应用于船舶尾流SAR 成像仿真。将点目标检测方法应用到船舶尾流检测成像中,以得到尾流SAR 图像。选取一幅二维尾流仿真图像,尾流范围为400 m×400 m,如图2 所示,获取其尾流波浪出现的位置,对该尾流进行SAR 成像模拟;将图2 灰度化,只保留尾流波浪部分,得到灰度处理后的尾流二维图像如图3 所示,尾流三维图像如图4 所示。

图2 船舶尾流仿真图像(400 m×400 m)

图3 船舶尾流仿真图像二维图(400 m×400 m)
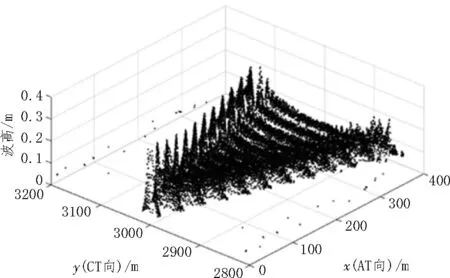
图4 船舶尾流仿真图像三维图(400 m×400 m×0.4 m)
经上述仿真检测方法采用图3 数据,经过式(7)计算可得到如图5 所示结果,其为距离向、方位向压缩后未进行距离徙动校正结果,图5 中、上、下侧出现类似尾流图像颜色较淡的重影,这部分的出现是由于距离向、方位向压缩过程中遗留数据造成。

图5 未进行距离徙动校正结果
经过距离徙动式(11)得到如图6 所示结果,其是经方位向、距离向压缩及距离徙动校正后得到的,图中5 出现的斑点经距离徙动校正后消失。
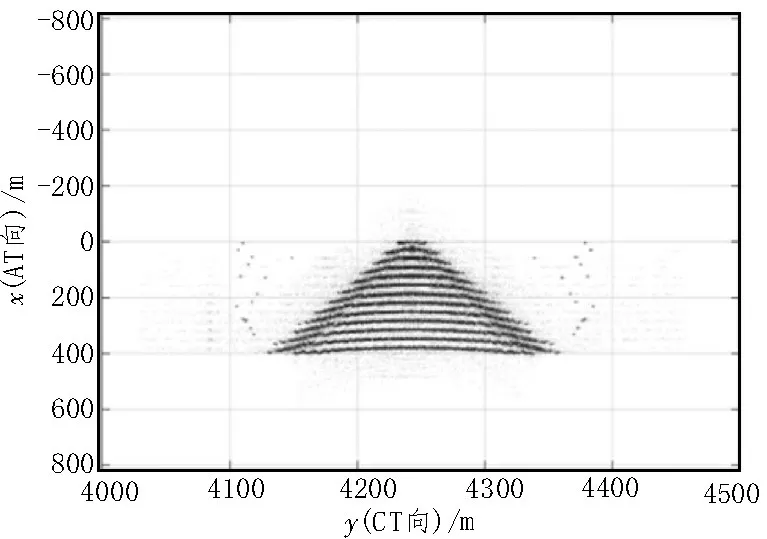
图6 距离徙动校正后结果
图7 为经透视校正得到最后结果,观察得到尾流图像基本完整,在图像上侧出现颜色较浅的相同尾流图像,由于该算法在距离徙动量的处理中会将小数四舍五入为整数,损失一部分数据,部分数据在处理过程中未能全部正常处理。SAR 图与仿真尾流图对比结果如表2 所示。
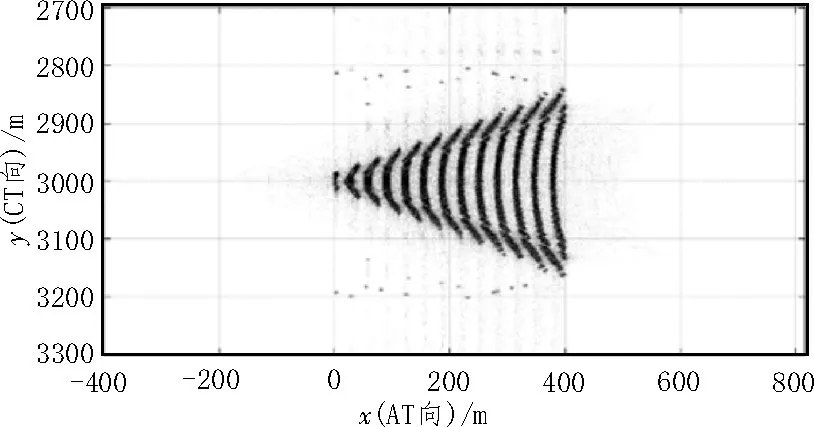
图7 透视校正后结果(Y0=3 000 m)

表2 SAR图与仿真尾流图对比结果
将SAR 尾流图像与尾流仿真图进行对比,尾流x轴方向起始点、终止点无变化,y轴方向以高度3 000 m 为起始点,上下距离为400 m,尾流主体宽度为300 m,尾流波浪无明显缺损。图8-9 为SAR 尾流图像与仿真尾流图像中单个波浪位置对比结果,其误差如表3 所示,其误差表明当探测目标越小时,误差越大;主要影响因素为雷达成像的分辨率、灵活性和稳定性,分辨率对SAR 成像起到重大作用,根据已有研究表明,需要1 m 的成像分辨率可以识别大型海面舰船目标,而对于坦克、战车等小型战术目标,利用1 m 分辨率仅能达到30%的识别率,0.3 m 的分辨率则可达到80%以上的识别率[9];仿真系统中SAR 设定分辨率为1 m,当探测目标大小为10 m 左右,其误差范围在20%左右;当探测目标大小为百米时,其误差范围为3%左右。SAR设定分辨率为0.3 m、探测目标大小为10 m 左右时,误差范围在12%左右;当探测目标大小为百米时,误差范围在1%左右。采用SAR 仿真成像,不需要考虑灵活性及稳定性问题。
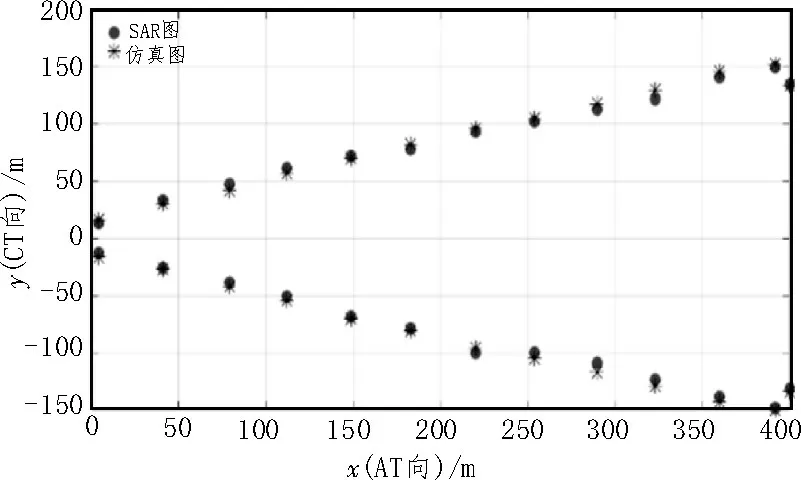
图8 分辨率为1 m时,SAR图与仿真图对比

表3 分辨率分别为1 m、0.3 m时,SAR图与仿真尾流图坐标对比

图9 分辨率为0.3 m时,SAR图与仿真图对比
4 结论
SAR 尾流成像可用于尾流反演研究,通过尾流形态分析,判断船舶航行状态。SAR 成像仿真的优点是在未进行耗资巨大的实验前进行模拟,为研究提供理论支撑;缺点在于实际情况与模型有偏差,在实际应用中需要进行误差分析及处理。对SAR 成像结果影响较大的参数为合成孔径雷达分辨率,分辨率的大小决定成像结果准确与否,分辨率越小则成像结果与原始图像越接近。
