移动机器人环境识别系统设计
2022-09-01钱苏珂李宗昊
钱苏珂,杨 洁,何 超,李宗昊
(西南林业大学机械与交通学院,昆明 650224)
0 引言
移动机器人应采用什么样的设计结构才能广泛应用如狭窄管道、塌陷废墟、震后或火灾后的高危地区等场所代替人类进行工作,目前比较典型的设计有采用低底盘桶型、内置轮式的结构[1],如林义忠等[2]设计的室内移动机器人,但此类结构也仅能适用于平坦地区;涂刚毅等[3]设计的混合式结构移动机器人采用高底盘车型、外置轮式的结构,其配有单目相机与多个红外传感器辅助,但此结构设计在一些狭窄地区进行自主倒行时会特别困难。另外,张国亮等[4]设计可变执行机构的教学移动机器人,在同一机器人底架上设计不同的行走机构方式,使机器人使用环境得到拓展,但由于传感器只有红外和触须两种,只能对周围环境起到一个简单的检测效果;曾庆源等[5]设计的垃圾分拣移动机器人,采用多个传感器相配合的识别方式,其性能得到了大大提升,但由于针对性较强,结构的可移植性便降低了很多;戴月[6]设计的双目视觉移动机器人,虽然提升了识别的效率和准确率,但由于采用的全向移动轮在石子或碎砾较多的场所易出现路径偏移,受限性较大;张帆等[7]设计的黄瓜采摘机器人采用履带式结构并搭建双目视觉系统,实用性能得到了很大的提升,但由于成本较高、体型庞大,并不适合广泛推广和结构移植。
综上所述,移动机器人的结构设计既要满足适用范围广,又要满足高性能、成本合适和可操作性。本文在XR-ROS机器人底盘的基础上,设计并安置视觉、听觉功能的硬件于底盘上,结合软件部分的功能控制,使机器人通过模仿人类的视觉、听觉实现对环境信息的有效接收和识别,实现人类无法进入的场所的勘察。同时,通过实验对设计的移动机器人环境识别系统的可靠性、可移植性、成本等进行了验证。
1 环境识别系统实验模型设计
一般地,城市地下排水管道国标规格最小为400 mm,因此实验模型采用长30 cm,宽26.2 cm 的底盘。整体主要由电源、电池、底盘、支撑垫板、功能面板、控制器、雷达、发动机、电路主板等构成,如图1 所示。行驶方式采用履带式车轮移动,相比于轮式和足式的移动方式,其适用范围更广、支撑更强、行驶更稳定。移动机器人底部中空可用于放置蓄电池和多余导线,底盘上众多孔槽用于设备的安装和导线的穿插。根据移动机器人底盘的规模设计出垫板的几何尺寸和孔槽位置,并且在第2 层垫板中间还特意留有足够长的导槽用来调整2 个摄像机之间的角度和距离,整体高31.9 cm,质量约4.3 kg。另外垫板之间的空间可以将与周边附件接口连接的信号线进行1 个集束。将电路主板安装完毕,开启功能面板开机后,就可以针对机器人的功能进行一系列操作,同时也可以通过底层编译2 次添加机器人功能。

图1 模型框架设计
2 实验模型硬件系统
2.1 视觉系统
移动机器人的视觉系统相当于人的眼睛,负责对环境信息最直观的采集,通过对比发现:单目视觉易损失图像深度信息,对于未训练过的场景匹配准确性不高;多目(3 目及以上)视觉需确定各个相机之间的合理相对位置才能保证取像的准确性,其结构配置复杂且实时性差[8]。而双目视觉系统成本低、计算深度信息匹配度高,其测距的原理与人眼更为相识且结构简单、实时性更好[9]。结合移动机器人需要倒退行驶的问题,因此将视觉系统分为两部分进行搭建:①前端的双目视觉部分,用于高精度识别前方目标物;②后端的单目视觉部分,用于倒退行驶时的导航。
视觉系统的主要设备配置:①单目相机采用常见的Robot-Eyes 高清摄像头,分辨率为130 万像素(1 280 ×1 024),尺寸为30 mm ×33 mm ×80 mm,,支持Windows系统,USB 直插;②双目立体视觉系统则采用的是2 台MIMACRO 公司的MI-130U210M/C 型摄像机,传感器型号为PYTHON 1300,像素尺寸为4.8 μm×4.8 μm,分辨率为130 万像素(1 280 ×1 024),尺寸为50 mm ×35 mm ×35 mm,帧速率(FPS)为210 f/s,USB3.0 接口,支持WIN7 或以上操作系统(CPU处理器i5 以上,内存4 GB 以上);③镜头为MIMACRO的HB0814-5M 型,焦距为8 mm,光圈范围为F1.4~16,后焦距为10.74 mm,最短工作距离为0.1 m。
视觉系统的工作流程为:①利用标定模块提前对系统进行一个视觉标定;②将得到视觉系统的标定参数进行存储;③左右摄像机同时启动,对环境进行实时图像采集并对其进行预处理;④对图像进行特征提取得到识别目标的像素坐标;⑤利用视觉标定得到的视觉系统标定参数和特征提取得到的识别目标像素坐标,通过深度计算算法得到识别目标的三维世界坐标[10]。
2.2 听觉系统
为了提升对周围环境识别的准确性,在移动机器人上安装型号为YDLID AR G4 的激光雷达进行障碍和距离检测,并辅助视觉系统完成定位、避障、导航等功能[11],其测量半径为16 m,测试频率为9 000 次/s,扫描频率为12 Hz。
考虑到移动机器人的重心问题和探测范围,因此将雷达安置在机器人前端。另外为了防止金属底盘振动时引起探头共振,产生误报现象[12],特意将雷达安装在垫板上并用塑料螺栓支撑。雷达工作后建立的二位栅格地图如图2 所示。

图2 二位栅格地图
3 实验模型软件系统
实验模型应用控制系统(Robot Operating System,ROS)的功能架构见图3。其具有强大的开源环境,系统结构也是由多个松耦合的进程(节点)组成[13],操作者可以根据机器人所需功能灵活添加各个功能模块,本文在此基础上进行了移动机器人的控制软件设计,其具体功能控制流程如图4 所示。

图3 ROS功能架构

图4 功能控制流程
4 信息传输系统
为提升信息传输的速度和稳定性,根据目前流行的传输接口方式:①USB 接口,该接口具有传输、连接、使用方便,不占用PCI插槽、性价比高等优点,但占用系统CPU较多[14],系统只用到1 或2 个相机的可先择此接口;②CameraLink接口,传输速度快的同时高像素下支持的帧率也比较快,但需额外配置图像采集卡,成本较高;③1394 接口,其传输距离较远且CPU占用率低,但需要占用PC插槽,价格相对USB接口较高,而且需要Packet Size(Packet Size是整个1394 总线的带宽)数据包大小设置;④WiFi 模块进行信号传输,采用5 G信息传输,传输范围半径约为400 m。
根据上述传输接口方式拟定了以下实验方案:
(1)笔记本电脑1 台,1394 接口连接器2 个(用于连接摄像机),1394 笔记本卡1 个,镜头2 个,12 V直流电源1 个。这里又可分为两种情况:①通过firewire接口转换器将两个摄像机连接到1 个接口上并接入PC 端,由于firewire 属于单通道总线,无法将两线路的功用完全发挥,此种情况下只能够发挥出摄像机一半的性能;②1 台摄像机通过firewire接口转换器连接,另1 台摄像机直接接入电脑自带的1394-mini口(需信号发生器外触发),此种情况下对PC 端的接口配置有一定要求,且在实际调试结果中显示两者不仅采集图像的帧率不同而且同步采集的实时性出入较大。
(2)通过互联网来实现摄像机的图像传输工作,采用“MPEG-4(基于内容的多媒体数据压缩编码)”与“DSP芯片”结合方式进行传输,在摄像机中,传感器所产生的模拟信号被A/D(模拟/数字)转换器转换为数字信号,之后将一直保持数字化的状态,无需进行多次数/模转化,不会出现图像质量下降的现象[15]。编码压缩后的图像通过网络TCP/IP 协议进行传输,完成对图像的存储和处理。但这种方案对宽带的速度(至少是千兆网)以及电脑的性能要求较高。
(3)笔记本/平板电脑1 台,连接摄像机的USB数据线,镜头2 个,若笔记本电脑可用自带的2 个USB接口直接接入(本文采用USB 接线线长52 m,适用于中短距离),平板电脑则需要配置外置USB连接器。
结合图像传感器的性能、实际的应用环境、现有的试验条件,本文选择采用了方案(3),传输方式采用USB接线与传输接口WiFi 模块(采用5G 信息传输)相结合,其原因是当使用期间USB 接线出现故障时(如接口松动、接线破损等)可快速调用WIFI 模块进行信号传输,不会导致信号中断,原理如图5 所示。
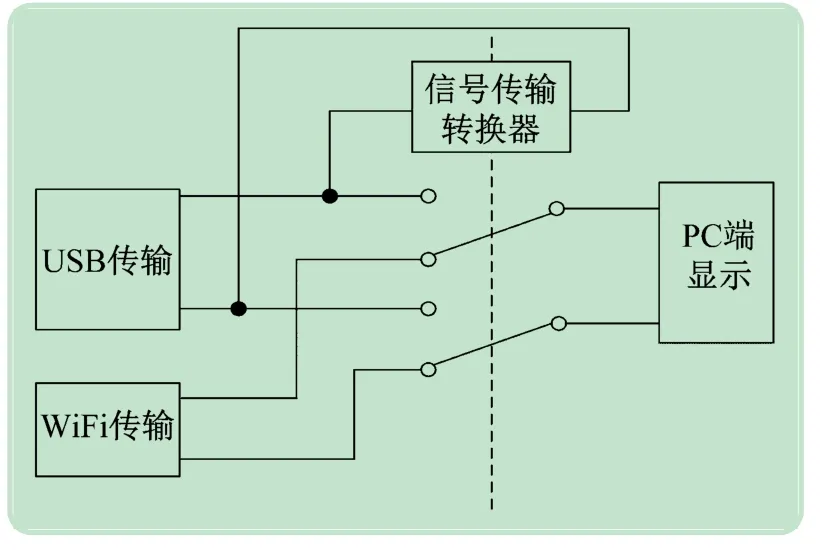
图5 信号传输转换原理
5 实 验
模型搭建完毕后,分别从路况复杂程度和光线强度两方面进行实验(本次实验所用PC 端为平板电脑)。
5.1 路况实验
对于路况行驶情况部分,移动机器人分别在平坦路面、泥洼路面以及碎石路面进行行驶测试,主要分析行驶的速度及偏移角度,测试情况如图6 所示。

图6 路况测试数据
5.2 光线实验
为了更接近实际应用环境,通过模拟不同光线强度来测试系统的识别能力,划分正常光、弱光以及无光3 种场景进行测试[16]。可以看出,处于强光和弱光环境之下时可以有效将目标物检测并识别出来,但是当无光环境下仅靠摄像机自带的光源难以达到正确检测的光源环境,因此需要配备一外置光源辅助,此时的识别效果和正常环境下的基本相同,如图7 所示。

图7 不同光线强度测试
可以看出,当系统在正常光及弱光的环境下可以正常感知环境信息,对目标物进行识别。但处于无光环境中时,仅靠摄像机自带的光源系统根本无法进行有效的目标识别。因此,需要配以外置光源进行辅助,如图7(d)所示,此时的识别效果与正常光效果下一致。
6 结语
通过实验表明,本文设计搭建的主控为ROS 具有环境识别系统、视觉和听觉系统、识别系统的移动机器人顺利实现了定位、避障、识别等功能,同时,在不同场景下对环境识别系统的性能进行了测试考核。结果表明,该系统具有可靠性高、可移植性强、成本低等优点。随着技术的发展,对环境识别系统还可继续优化,为移动机器人在代替人类进行区域勘察工作应用方面提供更高的参考价值。
