基于UWB的无人车自动跟随实验研究
2022-09-01曾庆喜欧邦俊修巧艳韩佳欣任建利
曾庆喜,欧邦俊,修巧艳,韩佳欣,任建利
(南京航空航天大学a.自动化学院;b.教师发展与教学评估中心/高等教育研究所,南京 211106)
0 引言
随着各行各业对自动化产品的需求的不断提升,自动跟随机器人逐步进入大众的视野,且应用愈来愈广泛。目前尽管已有多种多样的定位跟随技术,但都有着明显的缺陷。GPS易受建筑物的影响且在室内无法使用,在近距离跟随定位方面仍然存在定位精度差的问题[1];蓝牙技术作用距离有限,通信能力差,整合到其他系统难度较大[2];超声波技术会出现在传输过程中其信号不断衰减的现象,将导致无法锁定目标从而产生偏离而失去定位[3-4],红外技术受墙体或障碍物阻隔时信号强度低、实用性差[5];视觉图像技术的计算量往往过于庞大且对于具有相似特征的图像往往难以准确判断[6]。而超宽带(Ultra Wide Band,UWB)技术占用从Hz到GHz 的较宽频谱范围,与上述定位跟随技术相比有着更强的抗外界干扰能力,还保持着功耗低、成本低、精度高的优势,极具开发价值[7-9]。
本文设计了一种基于UWB 的无人车自动跟随系统并进行实验研究。主要采用基于双向飞行时间法进行测距,使用到达时间法和位置式PID分别实现UWB定位和无人车的自动跟随。
1 实验原理
1.1 测距原理
实验选取UWB Mini 3 s Plus作为传感器,该模块采用STM32F103T8U6 单片机为主控芯片。外围电路包括:DW1000 芯片、电源模块、LED指示模块等,既可以作为基站,也可以作为标签。该模块使用双向飞行时间原理进行测距[10-11],用发送源与接收源在各自的时间轴上发出信号并接收对方信号所经历的时间来测量距离。
如图1 所示,设发送机在自己的时间轴上发送信号的时间为t1,接收到信号的时间为;接收机在自己的时间轴上收到信号的时间为t2,回送信号的时间为;传播速度为c,则信号在两机之间传播一次的时间T为

图1 双向飞行时间原理

则可以得到所测得距离为

1.2 定位原理
关于UWB的定位方法,目前常用的有到达时间法(Time of Arrive,TOA)、到达角度法(Angle of Arrive,AOA)、到达时间差法(Time Difference of Arrival,TDOA)3 种定位方法[12-13]。AOA 算法往往需要布设多个传感器保证精度,成本较高;TOA 与TDOA 两种方法的原理类似,相较AOA 操作起来也更容易,考虑到算法实现的复杂程度问题,本文选择TOA 作为UWB的定位方法。
在无人车上布置3 个基站,基站之间的距离已知,且在同一水平面上。如图2 所示,基站0、基站1、基站2 的坐标分别为(0,y0,0)、(x1,0,0)和(x2,0,0),标签P的坐标为(x,y,z),投影Q为标签P的在基站构成的坐标系中的投影,θ 为投影Q与原点的连线与Y轴正方向的夹角。

图2 基站布置图
由于无人车跟随对高度信息没有具体要求,因此跟随目标的位置只需得知标签P在基站构成坐标系中的X和Y轴方向的坐标即可,通过三边定位算法[14-15]可得:
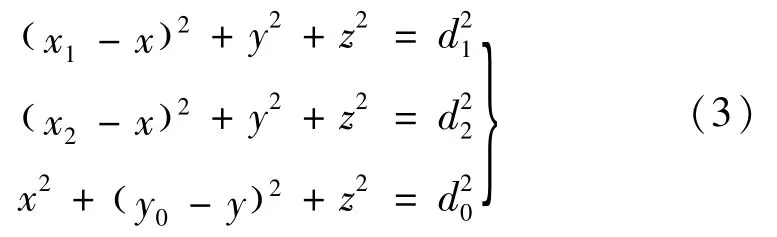
式中,d0、d1、d2分别为标签P到基站0、基站1 和基站2 的距离。由标签坐标可以得到投影Q与原点的连线与Y轴正方向的夹角

1.3 跟随原理
本实验不仅要做到无人车能够跟随目标,且能够按照距离目标的远近对车速进行调控。因此为达到较为平稳的控制效果,采用位置式PID控制无人车,并采用PWM波驱动电动机,如图3 所示。
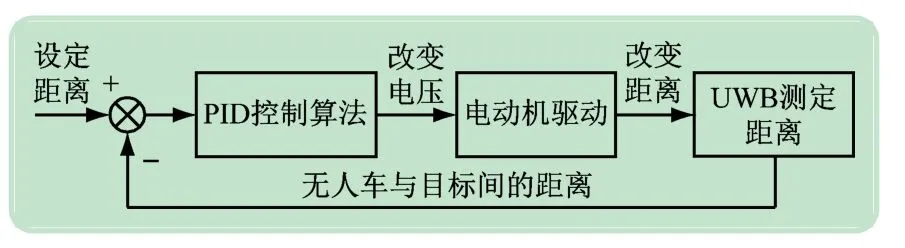
图3 无人车跟随原理
根据投影Q与原点的距离d以及与y轴正方向的夹角θ,之后即可确定目标与无人车的相对位置。由θ控制无人车的转向舵机,d与设定距离的差值作为位置PID式的输入值,输出的电压控制驱动电动机实现特定距离的稳定跟随。
2 实验方案设计与实验平台搭建
2.1 实验总体设计
考虑到无人车跟随过程中的安全问题,本文设定1.5 m为跟随距离。本实验的大致流程为:首先在无人车上布置3 个UWB 基站,跟随目标携带UWB 标签,UWB基站对UWB标签进行测距,并将所得测距信息发给车端的单片机控制模块,单片机对测距信息进行处理后解算出标签的相对位置,通过相对位置可以解算出标签和无人车之间的距离与角度并给电动机发送相应的控制命令,驱动无人车运动从而实现对目标的跟随,跟随过程中使用位置式PID 对跟随距离进行控制,并调节不同PID 参数直至无人车能够平稳的跟随目标进行运动。实验总体流程如图4 所示。

图4 实验总体方案
2.2 实验平台搭建
本实验装置主要由无人车、UWB定位基站与定位标签、单片机等组成,无人车实物图如图5 所示。

图5 无人车实物图
该无人车为阿克曼转向结构,长1.4 m,宽0.8 m,采用DHLG-03X舵机来控制转向。舵机是由直流电动机、减速齿轮组和控制电路等组成的一套自动控制系统,通过发送信号,指定输出轴旋转角度[16]。舵机的转动范围为0~360°,驱动电源为48 V,最大扭矩为98 N·m,与其配套的控制器由3.3~5 V的电源供电,可接收频率为50 Hz,脉宽为0.5~2.5 ms的PWM波来实现0~360°的转向。
舵机与转向轮相结合后测试得:当脉宽为1.82 ms时,转向轮回正;当脉宽为1.94 ms时,转向轮顺时针转至最大值约为30°;当脉宽为1.70 ms 时,转向轮逆时针转至最大值约为30°。
无人车所使用的驱动电动机为阿克曼转向机构车辆自带的电动机,经研究发现该电动机为直流电压驱动,驱动电动机的控制器可接收0~4.25 V 左右的电压,并依据电压的大小对车轮调速;当接收电压为0 V时,车轮不转动且具有自刹车功能,因此可通过调节驱动电机接收电压大小完成无人车的加速、减速与自刹车功能。设计一个RC 滤波电路并与PWM 波组合实现DAC功能完成模拟电压的输出,增强单片机IO 口的驱动能力,所设计的二阶无源滤波电路如图6 所示。

图6 滤波电路图
滤波电路图中加入了运算放大器,其并不起放大作用仅起到跟随作用,同时也起到了输入电阻无穷大,输出电阻为0 的功效可以避免负载对滤波电路的影响。
3 实验测试及结果
实验场地设定在室外区域,为了使无人车能够保持1.5 m的距离平稳的跟随目标,将实际测定距离与跟随距离的差值作为位置PID 的输入信号,实地测试如图7 所示。

图7 实地测试图
将UWB测得的无人车和跟随目标间的距离作为评判标准,选取不同的PID参数进行实验测试,实验结果如图8 所示。

图8 调节PID参数时无人车跟随距离图
经实验当比例系数kp取1.2,积分系数ki取0.03,微分系数kd取0.015 时,无人车可以在跟随距离1.5 m所属的较小范围内实现比较平稳的跟随。
跟随过程可分为直线部分与曲线部分,选取两组不同类型的跟随路线进行测试,即对直线与带有转向的路线。载波相位差分(Real-Time Kinematic,RTK)技术能够达到cm级的定位精度,因此使用RTK 作为无人车真实轨迹。使用两台同采样频率的RTK设备,其中一台由无人车携带,另一台由目标携带。目标沿固定路线行走,无人车通过UWB 跟随目标,实验结果如图9 所示。

图9 跟随过程实验图
图9(a)所示为直线跟随效果图,两次路线图基本重合,表明直线情况下跟随效果良好;图9(b)所示为带有转弯情况下的跟随效果图,图中两曲线形状大致相同然而部分弯道处存在曲线不重合的问题,表明无人车在拐弯情况下的跟随效果不够理想,但未出现较大的跟丢或者偏离较大的情况,因此基本上完成了自动跟随的任务。
4 结语
本文对基于UWB的无人车自动跟随进行实验研究,采用基于双向飞行时间的测距方法,并用UWB 实现定位和位置式PID进行无人车的控制方法进行了跟随实验。实验表明无人车可以较好地实现固定距离的跟随,在工业自动化以及日常生活中对于解放双手、减轻人们的负担方面具有重要的意义。
