光压模型对GPS精密单点定位的影响
2022-08-30祝会忠唐龙江
祝会忠 朱 爽 唐龙江
1 辽宁工程技术大学测绘与地理科学学院,辽宁省阜新市玉龙路88号,123000
虽然目前IGS提供的事后GPS轨道和各分析中心轨道的一维精度互差在1 cm左右,但是光压摄动力等非保守力的处理模型还未统一,太阳光压摄动依然是影响GPS卫星轨道精度的主要因素。在精密定轨中,ECOM1[1]和ECOM2[2]常作为参数化光压模型,Box-Wing(以下简称BW)常作为先验模型。在IGS 第3次重处理中,欧洲定轨中心(center for orbit determination in Europe, CODE)提供的ECOM1模型被推荐应用于Block ⅡR 和ⅡF卫星,ECOM2和美国喷气推进实验室(JPL)提供的GSPM模型被推荐用于其他类型的卫星。鉴于GPS有多种可用的光压模型,而关于不同光压模型对PPP性能影响的研究很少,本文分别使用ECOM1、ECOM1+BW和ECOM1+ABW等3种不同的光压模型进行GPS卫星精密定轨,然后利用得到的GPS精密轨道分别进行静态和动态PPP实验,并对定位效果进行统计分析。
1 PPP模型与数据处理策略
采用双频伪距和载波的无电离层组合消除电离层一阶误差项的影响,具体GPS PPP观测方程见文献[3],本文不再复述。
利用武汉大学自主研发的PANDA软件进行GPS精密定轨,采用MW组合及电离层残差组合探测周跳[4],采用最小二乘配置法进行参数估计。具体定轨处理策略如表1所示。PPP待估参数包括测站坐标、天顶对流层延迟、接收机钟差以及模糊度参数,其中接收机位置参数(x,y,z)分别进行静态和动态处理[5];对流层延迟采用Saastamoinen模型进行改正,湿分量剩余通过参数进行估计[6-8];相对论效应、固体潮汐、相位缠绕使用模型进行改正[9];卫星端和接收机端天线相位中心偏移(phase center offset, PCO)和天线相位中心变化(phase center variation, PCV)使用IGS提供的ANTEX文件进行改正[10]。具体参数估计策略见表2。
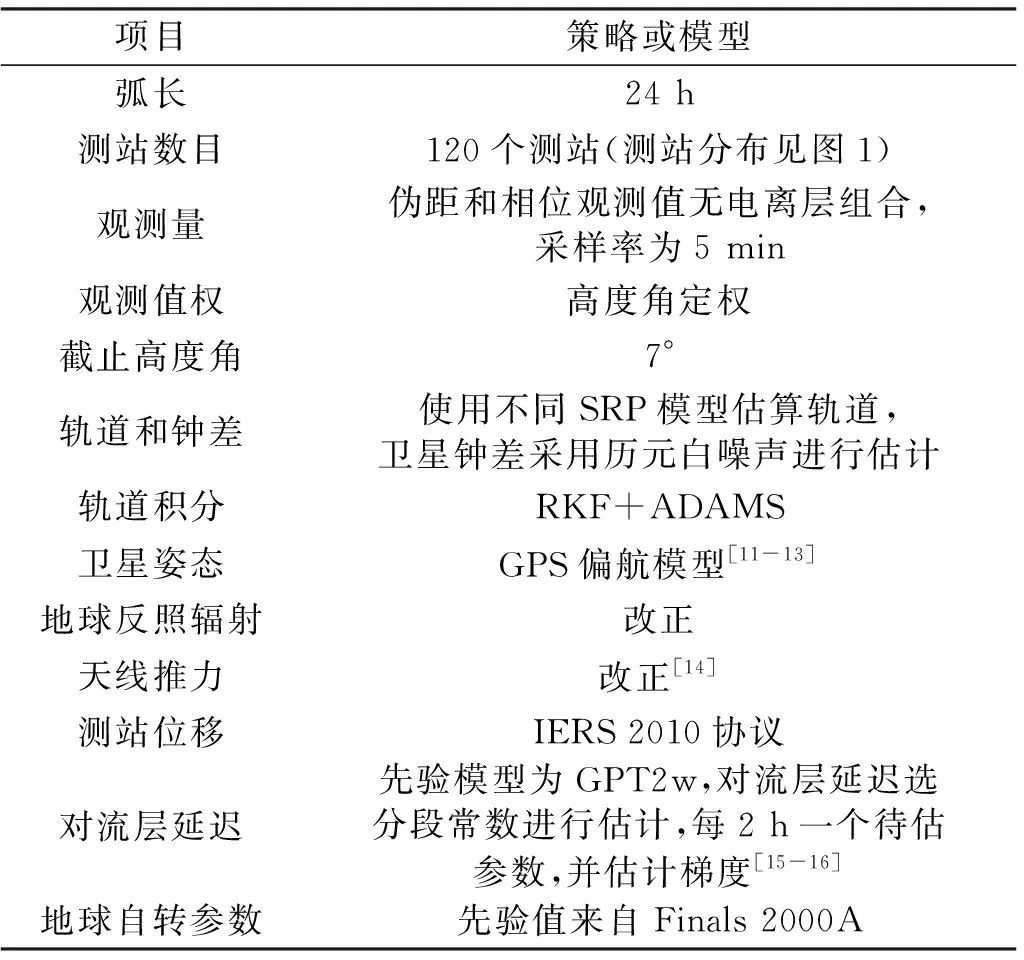
表1 GPS定轨处理策略
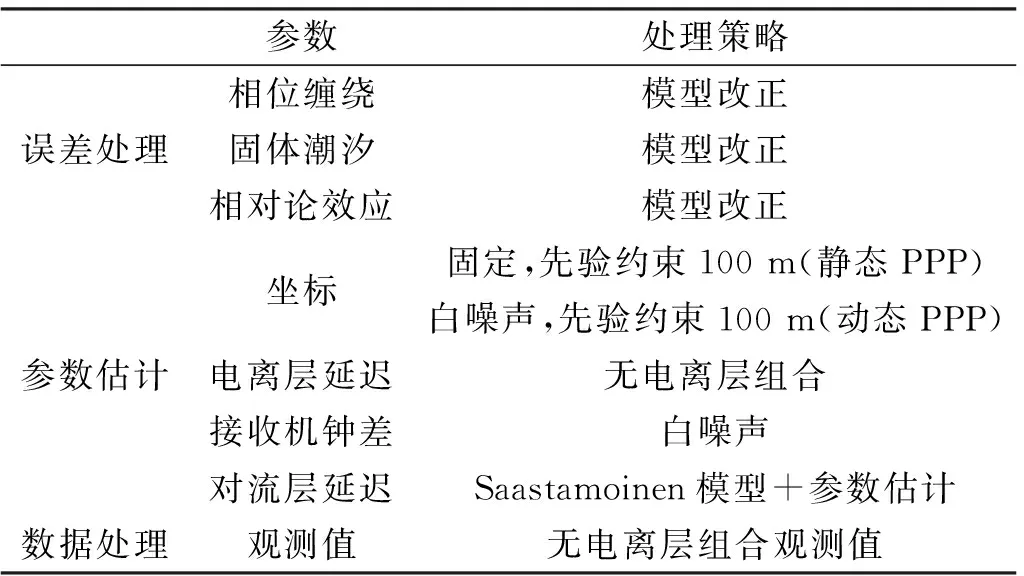
表2 PPP参数估计策略
2 实验设计与结果分析
首先利用全球120个跟踪站(图1)2019年doy110~139观测数据进行GPS精密定轨。结合IGS重处理建议,设计3种实验方案:1)仅使用5参数ECOM1模型;2)使用ECOM1及BW模型,其系数来自厂商[1,3],简称ECOM1+BW;3)使用ECOM1及BW模型,其系数来自文献[17],简称ECOM1+ABW。除光压模型外,其余待估参数设置均与IGS第3次重处理相同。
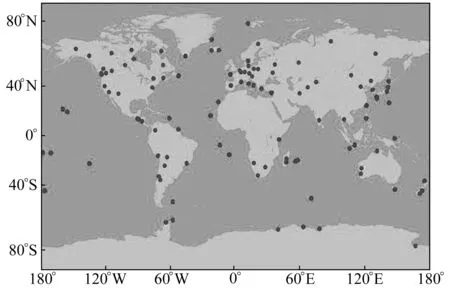
图1 测站分布Fig.1 Distribution of the stations
基于3种方案计算得到的轨道结果,选取未参与定轨的7个测站2019年doy110~139观测数据进行PPP实验。测站经度、纬度、天线类型见表3。
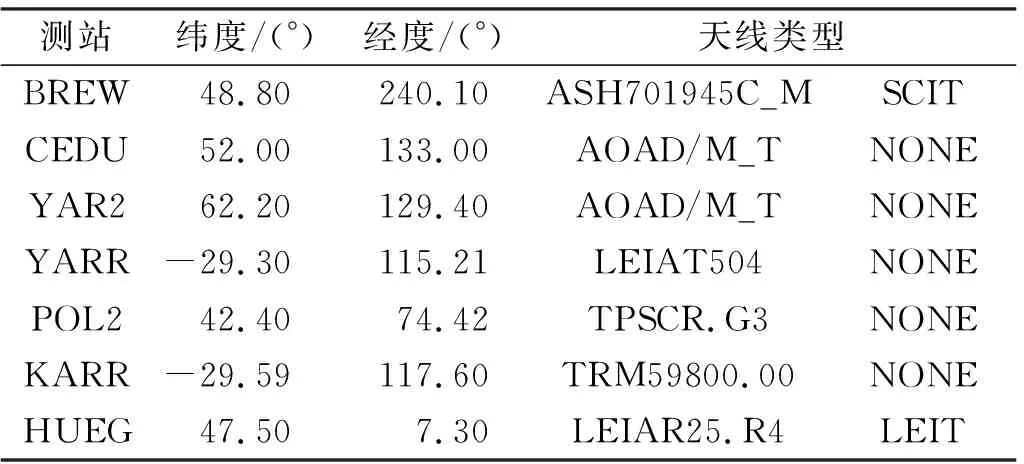
表3 测站信息
2.1 不同光压模型对轨道的影响
不同光压模型处理的轨道精度如图2所示。从图中可以看出,对于Block ⅡR卫星,在非地影期,采用ECOM1、ECOM1+BW光压模型的轨道三维RMS精度优于5 cm,而采用ECOM1+ABW的精度优于4 cm;在地影期,采用ECOM1、ECOM1+BW光压模型的轨道三维RMS精度优于6 cm,而采用ECOM1+ABW光压模型的轨道精度优于5 cm。
对于Block ⅡF卫星,在地影期,采用ECOM1+ABW光压模型的轨道精度略优于ECOM1和ECOM1+BW光压模型。因此,对于Block ⅡR和ⅡF卫星,在地影期及非地影期,采用ECOM1+ABW光压模型的轨道精度均优于ECOM1和ECOM1+BW光压模型。
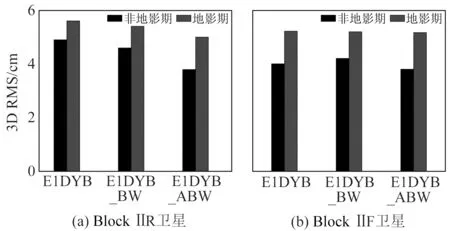
图2 不同光压模型对轨道精度的影响Fig.2 Influence of different solar radiation pressuremodels on orbit accuracy
2.2 不同光压模型对静态PPP的影响
本文分别使用ECOM1、ECOM1+BW和ECOM1+ABW等3种不同光压模型进行静态PPP解算并对解算结果进行统计(测站参考坐标为IGS SINEX单天解)。图3为各测站静态PPP定位误差RMS。以BREW站为例,ECOM1方案E、N、U分量定位误差RMS值约为0.82 cm、0.72 cm、1.40 cm,ECOM1+BW方案约为0.73 cm、0.68 cm、1.31 cm,ECOM1+ABW方案约为0.67 cm、0.62 cm、1.09 cm。7个测站的平均静态PPP定位误差RMS值见表4。从表中可以看出,ECOM1+ABW光压模型的定位精度最优,相比于ECOM1和ECOM1+BW光压模型,其E、N、U分量定位精度分别提高8.4%、10.9%、13.9%和3.7%、9.5%、6.7%。
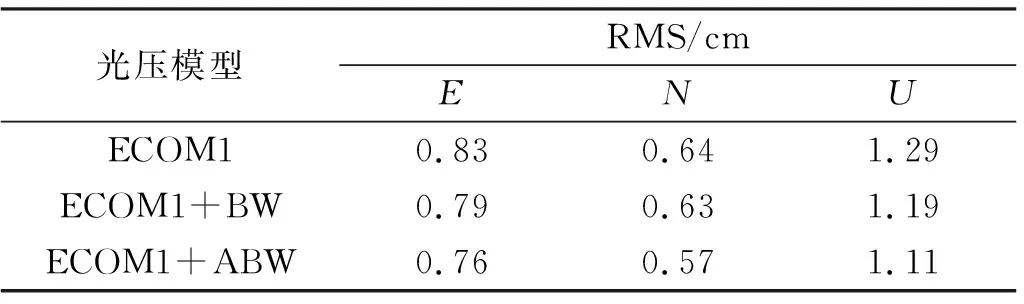
表4 各测站RMS均值
2.3 不同光压模型对动态PPP的影响
2.3.1 收敛速度分析
将单天解的PPP动态解算结果与IGS SINEX单天解参考值作差,获得E、N、U方向的坐标偏差以分析动态PPP的收敛时间和定位精度。当E、N、U方向连续20个历元的定位偏差均优于0.1 m时认为收敛。以2019-05-06 BREW站为例(图4),分析3种不同光压模型PPP的偏差。从图中可以看出,ECOM1、ECOM1+BW和ECOM1+ABW模型的收敛时间分别为45 min、35 min和30 min。
各测站平均收敛时间如图5所示。从图中可以看出,ECOM1、ECOM1+BW和ECOM1+ABW模型的平均收敛时间分别约为37 min、33 min和30 min。
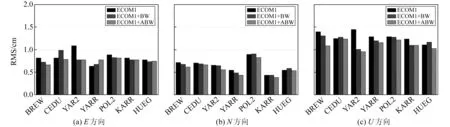
图3 各测站静态PPP定位误差RMSFig.3 RMS of static PPP error of each station
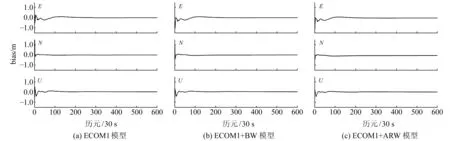
图4 BREW站PPP偏差Fig.4 PPP bias of BREW station
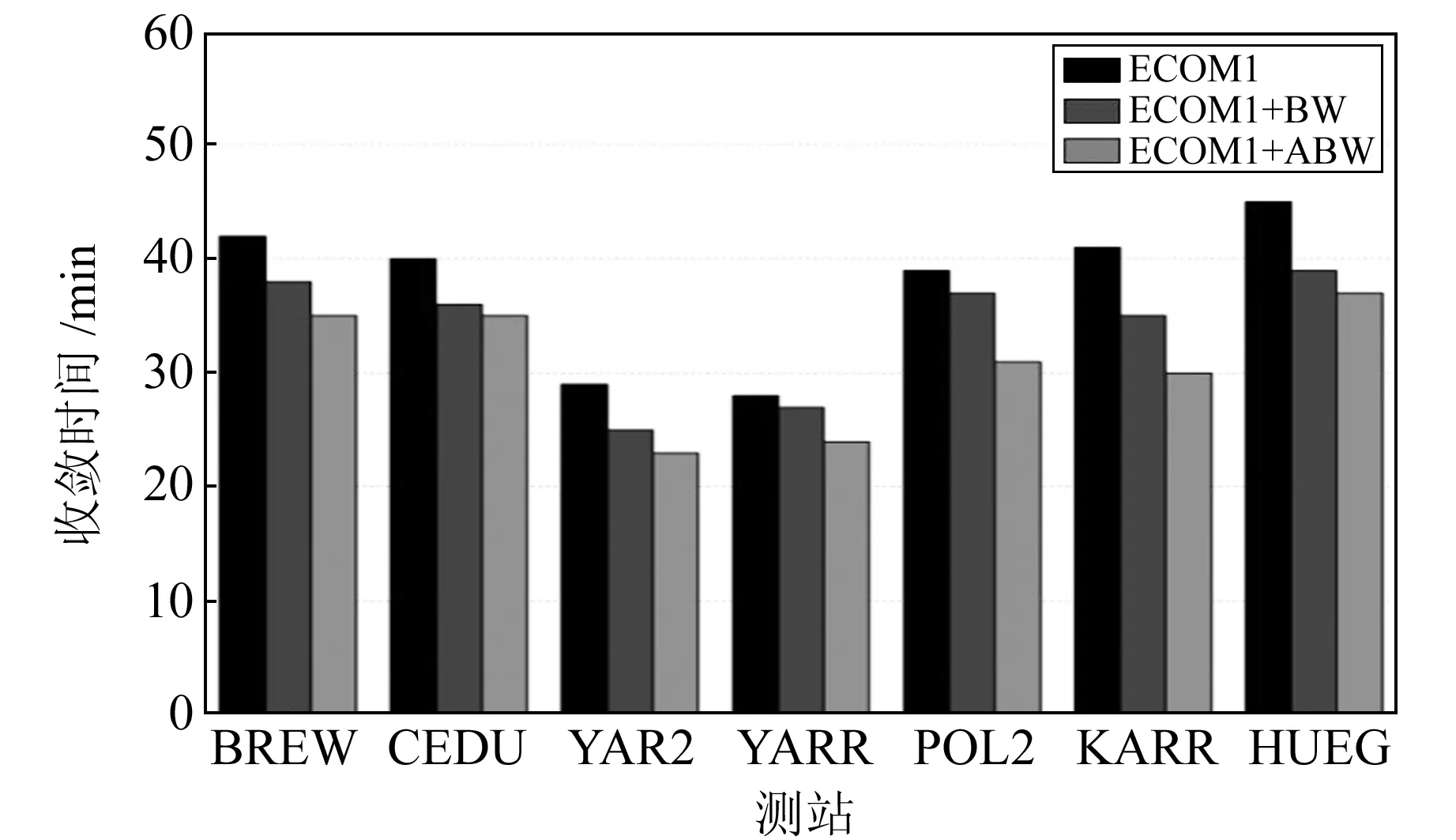
图5 不同光压模型平均收敛时间Fig.5 Average convergence time of differentsolar radiation pressure models
2.3.2 定位精度分析
图6为3种光压模型的GPS动态定位结果精度。从图中可以看出,ECOM1、ECOM1+BW、ECOM1+ABW模型的水平和垂直方向平均精度分别优于1.7 cm和2.6 cm、1.6 cm和2.3 cm、1.4 cm和2.0 cm。7个测站的平均动态定位精度见表5。由表可知,对于动态定位结果,相比于ECOM1和ECOM1+BW模型,ECOM1+ABW模型在E、N、U方向的定位精度分别提高16.8%、10.8%、22.2%和9.8%、4.2%、12.1%。

表5 各测站RMS均值
3 结 语
本文首先利用ECOM1、ECOM1+BW、ECOM1+ABW光压模型进行精密定轨,然后利用得到的轨道进行GPS静态、动态PPP实验,经分析得出以下结论:
1)在轨道精度方面,当卫星处于地影期和非地影期时,采用ECOM1+ABW模型的轨道精度均最优。
2)在静态定位精度方面,ECOM1+ABW模型与ECOM1模型差异最明显,前者精度比后者在E、N、U方向分别提高8.4%、10.9%、13.9%。
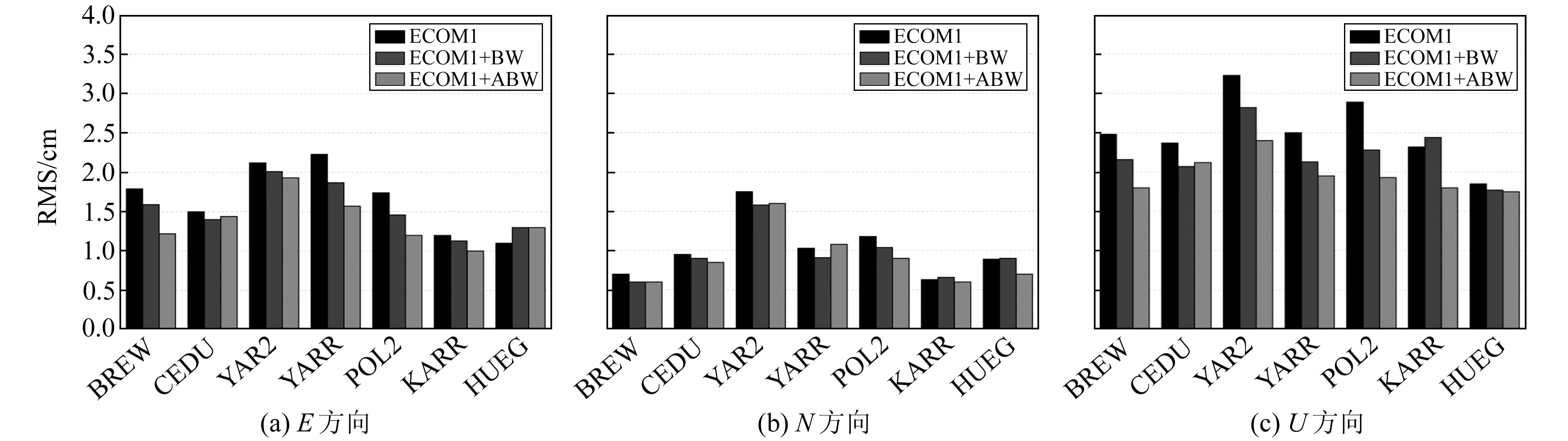
图6 各测站动态PPP定位误差RMSFig.6 RMS of kinematic PPP error of each station
3)在动态定位方面,ECOM1、ECOM1+BW和ECOM1+ABW模型的收敛时间分别为37 min、33 min和30 min;相比于ECOM1和ECOM1+BW模型,ECOM1+ABW模型在E、N、U方向的定位精度分别提高16.8%、10.8%、22.2%和9.8%、4.2%、12.1%。
综上所述,从不同模型定位的收敛时间和精度来看,ECOM1+ABW模型对PPP性能提升均最大。
