基于激光传感器的涡轮叶片气膜孔轴线方向检测算法
2022-08-30闫晓燊奚学程赵万生
张 敏,闫晓燊,奚学程,赵万生
(上海交通大学机械与动力工程学院,机械系统与振动国家重点实验室,上海 200240)
航空发动机作为飞机的动力核心, 需在高温、高压、高转速的工作环境下仍保证高推重比及可靠性。 目前,推重比为10 的航空发动机,其涡轮叶片工作环境温度达2000 K 以上[1]。 为提高涡轮叶片承温能力,人们除选用耐高温合金材料以及高性能热障涂层外[2],还需在涡轮叶片上设计加工用于冷却的气膜孔[3-4]。 为提高气膜冷却效果,同时保证涡轮叶片在高机械负载状况下的可靠性,气膜孔的孔径大多在0.2~1.0 mm 范围内且轴线方向、 位置分布、几何形状等都有严格的精度要求[5-6]。 正是由于气膜孔的孔径小、方向不一、位置分散,再加上涡轮叶片自由曲面的空间造型以及存在小孔高速电火花加工工艺误差等[7-8],气膜孔的轴向检测就成为航发涡轮叶片制造过程中的重点和难点。 此外,由于气膜孔检验技术的相对缺乏,气膜孔加工质量的一致性难以保证,进一步影响了航空发动机的可靠性。 因此,针对气膜孔轴向检测相关技术进行研究,具有重要的意义。
王呈等[3]设计了叶片气膜孔五轴光学复合测量机,通过旋转A、 B 轴,并借助图像处理技术定位至气膜孔轴向与CCD 相机光轴平行位置,进而确定轴线方向,但在操作过程中仍要依赖检测人员手动确定平行位置,检测效率低。 鲍晨兴等[1]在王呈的研究基础上改进,研制了一套基于CCD 相机的叶片气膜孔快速检测系统,采用高亮内置微小光源、配合四轴测量机构,实现对气膜孔的轴向检测,但检测精度受运动平台定位精度的影响较大。 杨慕升等[9]基于CCD 相机和图像处理技术,综合利用最小二乘算法及基于圆形表面起伏波动比的圆度判定新算法,对微内孔的几何特征进行分析识别。 上述基于CCD相机的研究,受CCD 相机自身测量原理限制,均存在由光学相机无法精确聚焦涡轮叶片自由曲面空间造型导致的气膜孔检测精度较低的问题。
Ramamurthy 等[10]提出了一种基于坐标测量与光学扫描相结合的自动测量系统,利用白光扫描仪获取气膜孔三维激光扫描点云数据确定气膜孔轴线方向, 但轴向检测精度受轴向初值影响较大。Muralikrishnan 等[11]提出了一种基于光纤探针传感器和三坐标测量机的小孔轴向检测方法,能较为精确地测量直径小于1 mm 的微小孔, 但该方法基于接触式的测量原理,测量速度慢、检测效率低。
针对上述气膜孔轴线方向检测中存在的问题,本文提出了基于激光点云的气膜孔轴线方向检测新方案,这是一种基于改进高斯算法的气膜孔轴线方向检测方案, 可避免现有算法中的初值选取影响,并能通过较高精度的点云法矢量进行加权最小二乘平面拟合,提取得到气膜孔轴线方向。
1 轴向检测算法整体技术方案
本文搭建了以五轴数控机床为载体、以线激光传感器为光学测头的检测平台。 首先,基于线激光五轴检测平台, 多位姿扫描获取气膜孔点云数据;接着,通过提升法矢量求解精度、调整反向簇法矢量进行高斯映射变换处理;然后,基于圆柱母线法矢量特征对轮廓带进行加权最小二乘平面拟合,确定气膜孔轴线方向;最后,通过实际检测实验对算法精度进行验证,具体技术流程见图1。

图1 基于激光点云的气膜孔特征参数提取整体技术流程图
涡轮叶片上加工的气膜孔均为高深径比的微小孔(图2)。为方便后续表述,本文将气膜孔外侧可见的小孔侧壁位置A 称为气膜孔入口坑道处。

图2 涡轮叶片气膜冷却孔入口坑道处示意图
2 气膜孔轴线方向检测算法
传统的圆柱点云几何特征提取算法可分为两种:①目标函数迭代法;②基于法矢量高斯映射的拟合算法。 其中,目标函数迭代法是基于圆柱模型空间几何函数,计算点云到圆柱表面的误差,通过迭代计算最小误差值的方法进行求解[12]。 该算法存在受初值影响较大、易陷入局部最优解、时间复杂度较大等问题。
法矢量高斯映射算法可避免初值选取影响,并在实际检测实验中,高斯映射算法相较于迭代法耗时更短、提取精度更高;高斯映射算法无需得到准确的法矢量计算结果,在实际工程应用中的抗干扰性强、算法可靠性高,具有更好的工程应用价值。
2.1 高斯映射算法
高斯映射广泛应用于点云分割、 特征提取、点云拟合等领域,其定义为:对于空间三维曲面点云数据P,计算其上所有点的单位法矢量l,并将法矢量的起点平移至单位球S 的球心上,则法矢量终点将移动至单位球面上。 以球心为原点建立笛卡尔坐标系,曲面上的点与球面上的点一一对应,这种映射被称为曲面点云到单位球面的高斯映射,即G:P→S。该单位球称为高斯球,如图3a 所示,曲面点云高斯映射的像记为G(P)[13]。 根据图3,平面法矢量的高斯映射是一个点,圆柱面法矢量的高斯映射是一个位于同一平面内的圆。

图3 高斯球及高斯映射图像
2.2 改进高斯映射算法
涡轮叶片气膜孔点云数据的曲面类型为圆柱面,但因为法矢量求解精度、实测点云缺失以及平面拟合精度等影响,基于实测点云数据高斯映射所得结果是带有一定宽度的圆弧轮廓带, 与图3e 所示理想结果存在较大误差(图4)。
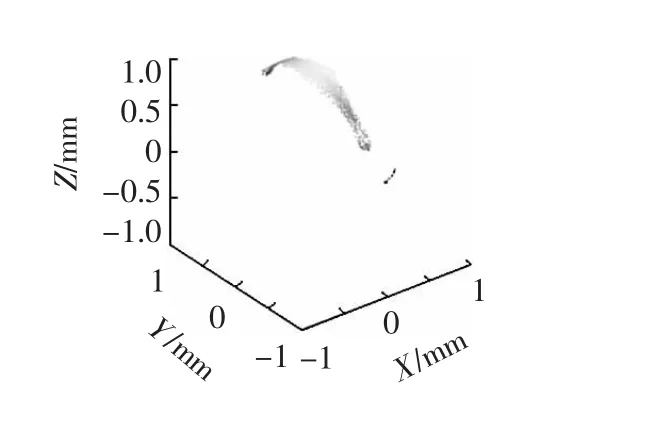
图4 气膜孔点云法矢量高斯映射轮廓带
法矢量求解精度、实测点云缺失以及平面拟合精度,是影响高斯映射算法提取轴向精度的主要因素。 本文针对高斯映射算法中存在的问题做了改进。 基于改进高斯映射算法的气膜孔轴线方向提取技术流程见图5。

图5 基于改进高斯映射的气膜孔轴向特征参数提取技术流程图
2.2.1 法矢量求解精度提高
针对法矢量求解精度对高斯映射变换产生的影响,本文基于轴向提取效果评价函数,在法矢量计算过程中获取最优的邻近点平面拟合K 值。
轴向提取效果评价函数为:

式中:i 为第i 个气膜孔;D(i)为基于高斯映射算法提取的第i 个气膜孔轴向;G(i)为Geomagic 软件提取的第i 个气膜孔轴向;K 为点云邻近点个数;n 为待测气膜孔个数;V(K)为邻近点个数K 的轴向提取效果评价函数。
对滤波后的点云采用K 邻近点拟合算法确定点云法矢量,基于邻近点个数K,通过邻近点平面拟合计算气膜孔三维激光点云法矢量。 其中,K 值的设定对法矢量的求解精度至关重要,当设置的K 值较小时,单个点的法矢量计算精度提高,但整体点法矢量的一致性降低,得到的轮廓带较宽;当K 值设置较大时,法矢量一致性提高,轮廓带宽度变窄,但是法矢量计算精度较差。
基于轴向提取效果评价函数的法矢量精度提升算法流程见图6。 首先, 通过K 邻近点计算滤波后的点云法矢量;然后,通过高斯映射变换及轮廓带平面拟合算法提取轴线方向;最后,依据轴向提取效果评价函数判断参数K 值选取是否合适,若符合轴向精度要求, 则取当前K 值作为邻近点个数,否则,再次迭代并重新判断,直至符合精度要求为止。 流程图中d 为邻近点增加个数。

图6 基于轴向提取效果评价函数的法矢量精度提升算法技术流程图
本文通过基于轴向提取效果评价函数的法矢量精度提升算法对气膜孔仿真点云数据进行处理,从而确定平面拟合参数K。 其中,d 取100, 具体实验数据见表1。如图7 所示,法矢量精度提升后的算法轮廓带宽度显著减小。 由实验数据可得,K 值选取影响轴线方向提取结果,并且轴向提取精度随着K 值增大呈现先提高再降低的特征规律。 K 取300时,评价函数V(K)取最小值,即0.3695°。

图7 法矢量精度提升后的高斯映射轮廓带

表1 基于轴向提取效果评价函数的K 值选取
2.2.2 实测点云缺失补偿
针对点云缺失对轴向提取精度产生的影响,本文基于圆柱母线点云法矢量特性,利用部分圆柱点云提高轴向提取精度。
(1)反向簇法矢量调整
受线激光传感器测量原理限制,无法获取完整气膜孔入口坑道处扫描点云数据。 单个气膜孔点云见图8。

图8 单个气膜孔入口坑道处扫描点云图
图9a 是上述气膜孔点云经过上一章节所述高斯映射变换算法处理后得到的轮廓带,该点云在高斯球内的投影点可近似为一维分布。 通过上述过程虽得到了法矢量,但同时也出现反向簇,即法矢量的方向与实际相反,轮廓带形状也为圆形。 因此,为避免反向簇法矢量对平面拟合的影响,需将法矢量的方向调整一致。 如图9b 所示,本文基于点云扫描轨迹的先验知识,调整点云法矢量方向,使轮廓带形状与叶片气膜孔入口坑道点云一致。

图9 涡轮叶片气膜孔点云高斯映射轮廓带
(2)圆柱母线点云法矢量提取
由于存在实测点云缺失、点云测量误差,直接拟合轮廓带平面的难度较大且在此基础上得到的轴向提取结果精度较差,故本文基于圆柱母线点云法矢量特性,进一步筛选高斯映射点云法矢量。
圆柱面是由一条直线在空间连续运动的轨迹,而产生曲面的直线称为母线l。 为比较法矢量之间的相似度,以欧式距离作为相似度计算公式,即:

上述理想圆柱面三点处的法矢量相似度如下:

由电火花加工工艺及激光传感器测量原理可知,图8 所示点云数据轮廓并非理想圆柱面,但存在最佳圆柱面,可使实测点云拟合效果最好。
假设直线l'为上述圆柱面上的一条母线, 由于实测点云无法落在母线上l', 本文基于点云法矢量相似度进行以下定义:
式中:ε 值大小根据点云扫描间隔Δx 及加工电极直径d 决定。
气膜孔点云数据拟合圆柱面上有无数条母线,但存在一条母线上分布的点云数目最多,故将其定义为主母线l0。
基于上述法矢量相似度计算规则,假设实测点云上两点的法矢量相似度小于ε, 则两点位于同一母线。 因此,本文通过法矢量相似度迭代统计计算,提取点云数据中分布在主母线l0上的点云(图10),并拟合得到l0(图11)。 图10 所示点云法矢量相似度均小于ε,因此高斯映射后,圆柱主母线上点云法矢量分布在直径小于ε 的区域内, 近似为图11 所示轮廓带上的一点。

图10 气膜孔主母线上点云数据分布

图11 气膜孔主母线拟合结果示意图
2.2.3 平面拟合精度的提高
针对平面拟合精度对轴向提取精度的影响,本文基于上一章节所述母线点云法矢量,通过加权最小二乘平面拟合算法进行平面拟合,步骤如下:
(1)针对实测点云数据,基于法矢量相似度迭代计算,提取主母线l0上点云法矢量集合,其分布是在直径为ε 的球区域内。
(2)对上述法矢量集合进行加权中心化处理,即以带权重的中心法矢量代替作为母线法矢量,其计算公式为:

式中:kc为权重系数, 由主母线上点云法矢量数量决定为主母线上第i 点处的法矢量。
(3) 筛除步骤1 中主母线l0上点云及其法矢量,并且基于剩余的点云数据重复步骤1 和步骤2,得到点云圆柱面上若干条母线对应的中心法矢量为。
(4)上述步骤得到的中心法矢量,其轮廓在单位高斯球内近似为一半圆弧,对其进行加权最小二乘平面拟合,进而提取气膜孔轴线方向(表2)。
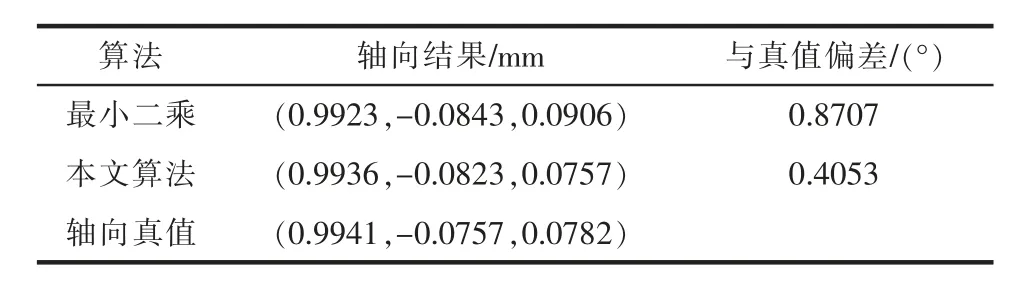
表2 两种平面拟合算法下的轴向提取结果
2.2.4 改进高斯映射算法结果
根据前述内容,本文基于圆柱母线点云法矢量特性对实测点云缺失进行了补偿, 也通过加权最小二乘平面拟合算法提高了平面拟合算法精度,在上述改进算法基础上再次迭代应用基于轴向提取效果评价函数的法矢量精度提升算法,从而确定K 值的最优取值为300。 通过上述改进高斯映射变换算法的气膜孔轴线方向检测新方案,可实现基于激光点云的气膜孔轴向方向精确检测(图12)。

图12 基于改进高斯映射变换算法的气膜孔轴线方向检测
3 气膜孔轴线方向检测实验
基于激光点云的气膜孔轴向检测系统由运动平台模块、点云数据扫描模块、点云数据处理模块以及相应的控制模块构成。 运动平台模块是上海交通大学自主研发的五轴检测机床(图13);点云数据扫描模块采用三角反射式线激光传感器,以此对气膜孔表面进行扫描以获取激光三维点云数据,本文采用LJ-V7060 系列线激光轮廓测量仪, 其重复精度达到0.4 μm、Z 向测量高度为(60±8) mm、测量行程为15 mm;点云数据处理模块将激光扫描得到的点云数据导入PC 端, 并采用本文提出的点云分割算法筛选气膜孔区域目标点云数据,而后基于改进高斯映射算法及平面拟合算法,提取确定气膜孔轴向特征参数。 在相应控制模块中,五轴测量机控制系统采用EtherCAT 总线架构。 人机交互界面基于Qt5 平台开发,运行于Ubuntu12.04 操作系统之上。

图13 五轴数控机床运动平台模块
本文基于上述检测系统开展了如下的气膜孔轴线方向检测算法精度验证实验。
3.1 原理可行性验证
原理可行性验证通过利用改进的高斯映射轴向提取算法, 处理带有噪声的仿真圆柱点云数据,并将提取结果与真实值进行比较。 气膜孔仿真点云数据见图14。本文算法轴向提取结果与轴向真值的偏差角度见表3。结果表明:基于改进高斯映射变换算法的气膜孔轴线方向检测方案能提取得到较高精度的轴线指向结果,在原理上具有可行性。

表3 仿真点云在不同轴向提取算法下轴向精度对比

图14 气膜孔仿真点云数据图
3.2 精度可靠性验证
精度对比验证是利用改进的高斯映射轴向提取算法检测气膜孔轴向, 并将轴向提取结果与Geomagic 软件提取的轴向结果进行对比。 Geomagic软件是一款逆向工程和三维检测软件。
表4 所示的对比实验结果显示:基于本文算法提取得到的轴向结果与Geomagic 轴向结果之间的平均偏差角度为0.3611°、提取精度可达0.6290°,满足轴线方向精度检测要求。

表4 改进高斯映射轴向提取与Geomagic轴向提取精度对比
4 结束语
本文针对航发涡轮叶片气膜孔的轴线方向检测进行研究, 基于线激光传感器获取表面点云数据, 采用高斯映射变换算法处理得到法矢量轮廓带;结合母线点云法矢量特性,通过加权最小二乘平面拟合提取轴向特征结果。 实验结果表明,本文所提算法的轴向提取精度可达0.6290°,为气膜孔轴线方向检测提供一种有效、可行的技术方案。