最小工作时长约束下的传感器调度方法
2022-08-30李召瑞陈志刚
安 雷,李召瑞,吉 兵,陈志刚
(1.陆军工程大学石家庄校区,河北 石家庄 050003;2.中国人民解放军32272部队,甘肃 兰州 733000)
0 引言
传感器调度主要通过有针对性地分配传感器资源及探测时间区间,以达到提升目标跟踪精度、增强系统生存能力、扩大侦测覆盖范围及优化信号处理效果等改善传感器系统性能的目的[1]。根据决策时长可将调度方法分为短时调度和长时调度,短时调度方法以单步收益为决策依据,系统设计简单、计算量小[2];而长时调度方法考虑多步累计收益,虽然增加了一定计算量,但优化性能要明显优于短时调度[3-4]。不过,由于两类方法均未对单个传感器的工作时间进行约束,导致存在因频繁切换而使系统响应延迟大量累积,进而降低目标跟踪精度的问题[5]。
为此,在确保跟踪精度的同时,必须充分考虑降低传感器频繁切换所带来的使用代价即切换代价的问题。文献[6—7]将交接次数阈值代入到调度方案求解当中,但获得的结果并不稳定。文献[8]为应对相控阵雷达跟踪中存在的时延问题,引入调度代价以确保任务优先级,但可操作性不强,容易丢失最优解。文献[9—10]则对传感器每次执行观测任务的时长进行了约束,若当前传感器完成了此轮观测,则立即择优选取其他传感器执行任务,由于该方法放弃了过多的可选方案,导致调度效果明显欠佳。而文献[11—12]虽然同样对传感器每次执行任务的时长进行了约束,但规定了达到基本时长后,仍可依据下步预测结果继续调用当前传感器,保留了更多可选方案,优化效果更好。
针对上述问题,本文以理想条件下的多传感器多目标跟踪为应用场景,借助经典目标跟踪滤波算法,提出基于切换代价控制的最小工作时长约束调度方法。
1 问题的数学模型
在传感器对目标的实际跟踪中,由于量测结果常常存在包含噪声、目标漏检以及虚警等问题,因此普遍基于部分可观马尔可夫决策过程(partially observed MDP, POMDP)对传感器调度过程进行建模[13]。其基本流程:系统执行上一时刻得到的调度动作,由相应传感器工作一定时长,获得目标状态的量测结果;将量测结果代入调度方法,并依据优化目标得到下一时刻调度动作,如此循环往复[3]。
1.1 调度动作
规定系统中有N部主动传感器,观测区域内存在M个敌方目标,且当前为k时刻,则调度动作可定义为:

(1)
式(1)中,

(2)
1.2 目标状态模型
由于观测区域内共有M个目标,所以k时刻的多目标状态模型为:

(3)

(4)

1.3 目标量测模型
(5)
1.4 目标优化函数
充分考虑不同传感器功能的差异性,将传感器n的最小工作时长设为φn。假设传感器n1在k时刻已工作满φn1时长,则此时依据目标优化函数决策是否进行切换,其中n1按照单步时长确定决策依据,其余传感器则按照最小工作时长φn确定决策依据。在此基础上,构建最小工作时长约束调度目标优化函数
(6)
(7)
2 传感器调度方法
2.1 IMM-FQPF滤波算法
结合前文对目标状态模型和目标量测模型的定义,本文采取基于交互式多模型(interacting multiple model,IMM)[14-15]的滤波算法进行目标状态估计。同时,由于模糊积分粒子滤波(fuzzy quadrature particle filter,FQPF)[16]相比于粒子滤波所具备的并行处理能力和更佳的滤波性能,为更好地实现多目标跟踪滤波,提出IMM-FQPF滤波算法。
步骤1 初始数据交互

(8)

(9)
步骤2 模型滤波估计
1) 状态估计及其协方差矩阵
(10)

2) 模型残差及其协方差矩阵
(11)
式(11)中,NS为粒子数目,且有
则为粒子u的权值。
3) 状态估计及其协方差矩阵
(12)

(13)
步骤3 模型概率更新

(14)
且模型j的模型概率更新为:
(15)
式(15)中,c为归一化因子,
(16)
步骤4 数据估计融合

(17)
2.2 基于PCRLB的目标跟踪精度预测方法

步骤1 初始化

步骤2 获取状态转移矩阵


(18)
步骤3 计算目标状态预测值
步骤4 计算目标量测预测值
步骤5 代入IMM-FQPF滤波算法

步骤6 定义Fisher信息矩阵
由于目标估计状态预测值满足:
(19)
故Fisher信息矩阵可定义为:

(20)
步骤7 获取目标运动状态模型

(21)
步骤8 计算目标状态转移先验概率密度函数
依据文献[20],目标m的状态转移先验概率密度函数为:
(22)
步骤9 计算Fisher信息矩阵

(23)
式(23)中,
(24)
步骤10 计算跟踪精度预测值
本文考虑理想条件下的多目标跟踪背景,所以采取将多目标跟踪分解成多个单目标跟踪的方式来实现,传感器n针对目标m的跟踪精度预测值为:
(25)
则传感器n针对多目标的跟踪精度预测值为:

(26)
式(26)中,αm为传感器系统在跟踪目标时根据其威胁程度分配的权重系数。
步骤11 循环
若h<φn,令h=h+1,转到步骤2;若h=φn,循环结束,计算传感器n在最小工作时长φn内的长时跟踪精度预测值:
(27)
2.3 调度方法及流程
步骤1 初始时刻
步骤2 重新决策
若k时刻(k>1)传感器n1已达到最小工作时长要求,则重新进行决策。
步骤3 预测目标跟踪精度
步骤4 决策选取调度方案
将各传感器跟踪精度预测值代入目标优化函数式(6)中,决策选取最优传感器η。
若η=n1,则k时刻继续调用传感器n1工作,工作时长h=1。
若η≠n1,则k时刻切换传感器η工作,工作时长h=φη。
步骤5 执行调度方案

步骤6 循环
若k+h-1
若k+h-1≥H,则调度任务结束。
调度方法流程如图1所示。
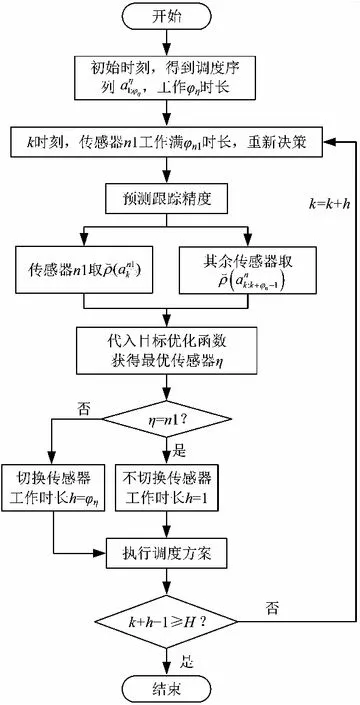
图1 最小工作时长约束调度方法流程图Fig.1 Flow chart ofminimum working timestep constrained scheduling method
3 仿真验证与分析
假设系统采样间隔τ=1 s,且包含3台主动传感器,跟踪2个机动目标,传感器的位置分别为N1(0 m,-2 000 m),N2(-5 000 m,0 m),N3(5 000 m, 0 m),量测噪声协方差矩阵分别为R1=diag([0.5 m;10-6rad]),R2=diag([1 m;2×10-6rad]),R3=diag([1.5 m;3×10-6rad])。由于探测性能越好的传感器向外辐射电磁波的能力越强,为提高传感器系统战场生存能力,尽可能地避免被敌方截获探测信号,规定探测性能越好的传感器最小工作时间φ越短,则各传感器最小工作时长分别设置为φ1=2 s,φ2=3 s,φ3=4 s,跟踪任务时长75 s。
3.1 调度方法性能分析
在仿真中,为验证提出的基于切换代价控制的最小工作时长约束调度方法(minimum working timestep constrained scheduling method, MTSM),同时与基于目标跟踪精度最优化的短时调度方法(myopic scheduling method, MSM)[7]和就近调度方法(nearby scheduling method, NSM)[11]、固定时长调度方法(fixed time scheduling method, FTSM)[9]以及单传感器跟踪进行对比。
为较为直观地显示调度方法对传感器切换代价的控制作用,采取仿真时间内传感器系统的切换次数(switching times, ST)作为切换代价的评价指标,并以任务时间内目标估计状态的均方根误差均值(root mean square error, RMSE)作为目标跟踪精度的评价指标,为便于表述,后文中以“RMSE”代表任务时间内的均方根误差均值。在目标跟踪精度阈值ρth=4 m时,利用本文所提MTSM进行调度,得到目标运动轨迹如图2所示,传感器调度序列如图3所示。
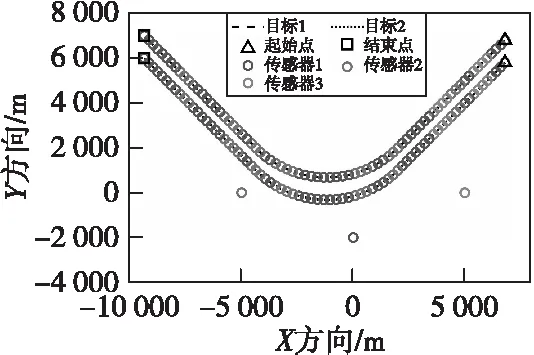
图2 目标运动轨迹Fig.2 The targetmotion trajectory
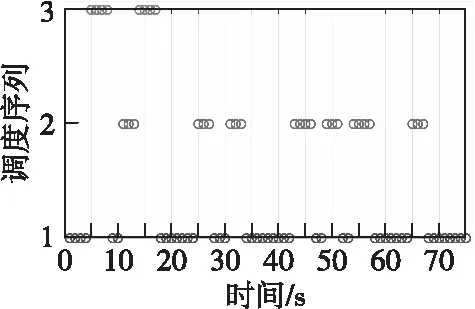
图3 传感器调度序列Fig.3 Sensor scheduling sequence
图4所示为本文所提的MTSM与MSM、FTSM在不同阈值条件下,以及NSM、各传感器单独工作时,仿真时间内各时刻目标估计状态的均方根误差对比情况。
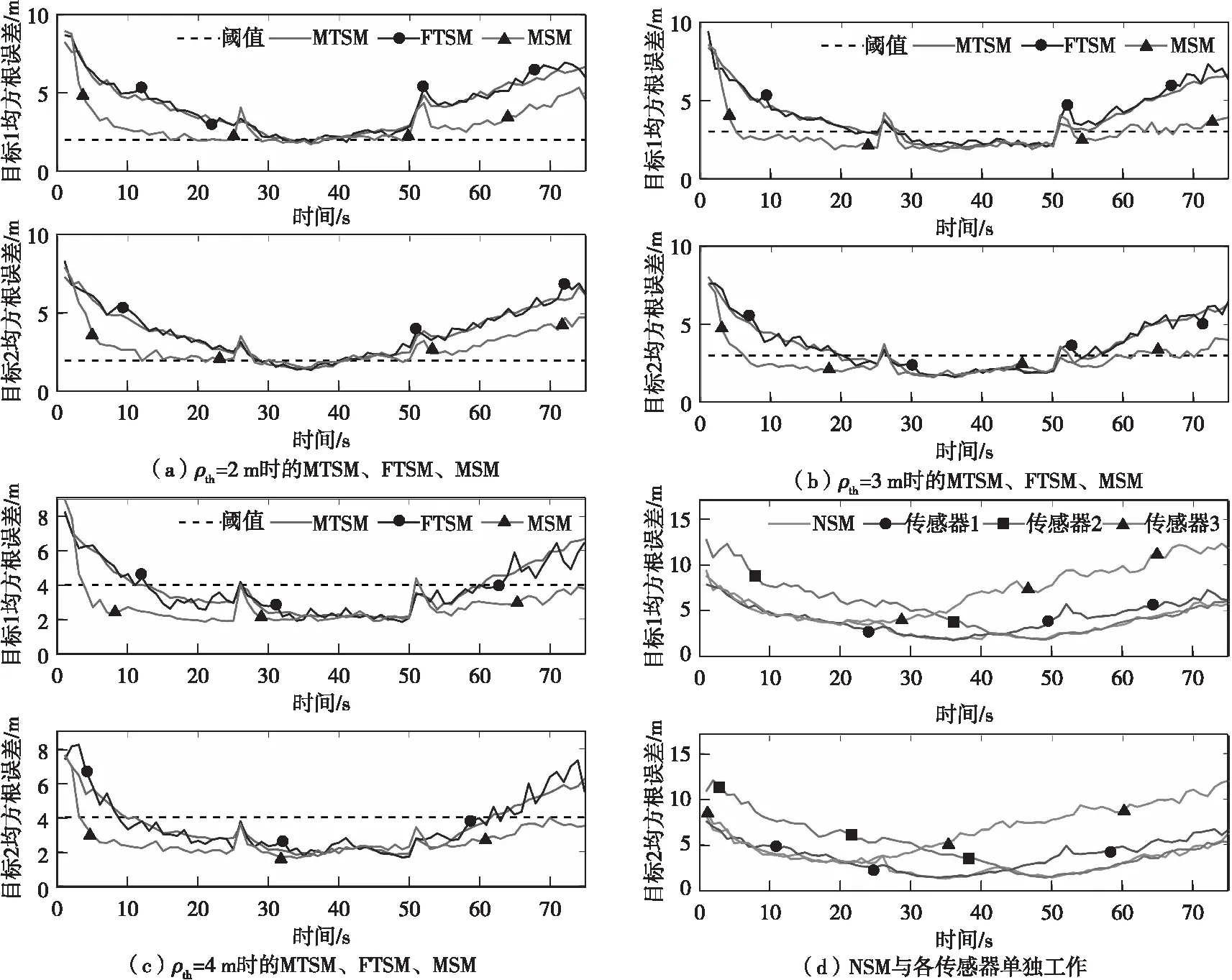
图4 各时刻目标估计状态均方根误差对比Fig.4 Comparison of root mean square error of target estimation state at each time
相同实验中的RMSE及ST对比情况如表1、2所示。
从表2中可知,在使用单传感器实施目标跟踪时,由于不进行优化选取,跟踪全程都采取同一传感器,导致跟踪精度较低,与应用各调度方法得到的跟踪结果相比存在较大的差距。
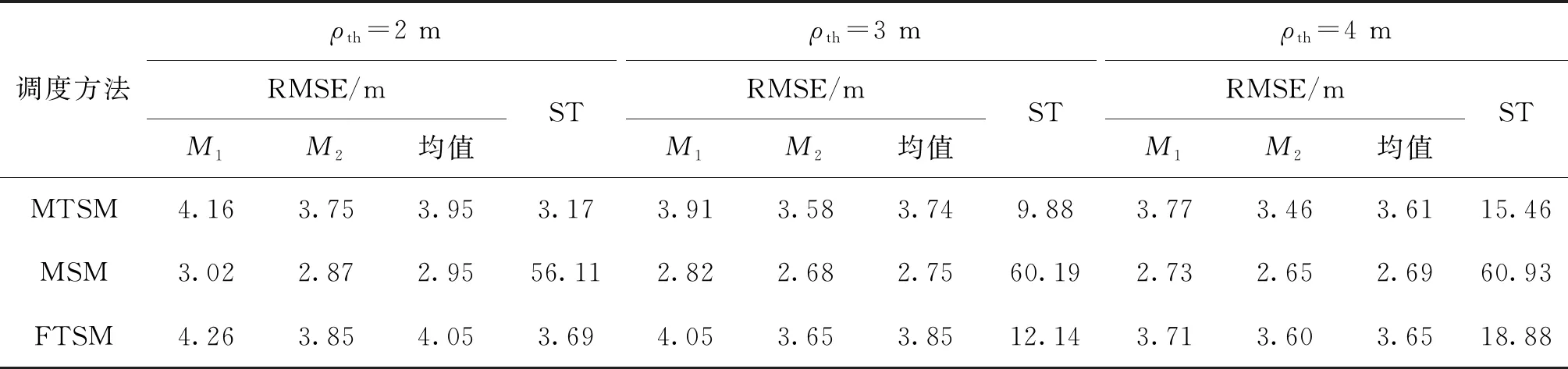
表1 阈值可调节调度方法的性能对比Tab.1 Performance comparison of threshold adjustable scheduling methods
而相比于MSM的短时调度方法,MTSM在跟踪精度上稍差,在表1中的3个阈值条件下,得到的RMSE均高于MSM,但传感器切换次数ST则要远低于MSM。由于MTSM的优化目标是在一定跟踪精度的基础上,有效降低传感器切换代价,所以MSM在切换代价上的巨大差距使得其跟踪精度优势并不明显,无法满足切换代价优化的要求。
同时,对比FTSM工作满固定时长后即切换其他传感器的情况,本文所提MTSM规定传感器在工作满最小时长后,再依据决策指标决定是否切换,保留了更多的可行解,所以得到的调度方案更优。在表1中,MTSM在3个阈值条件下,无论是RMSE还是ST,均要优于FTSM。
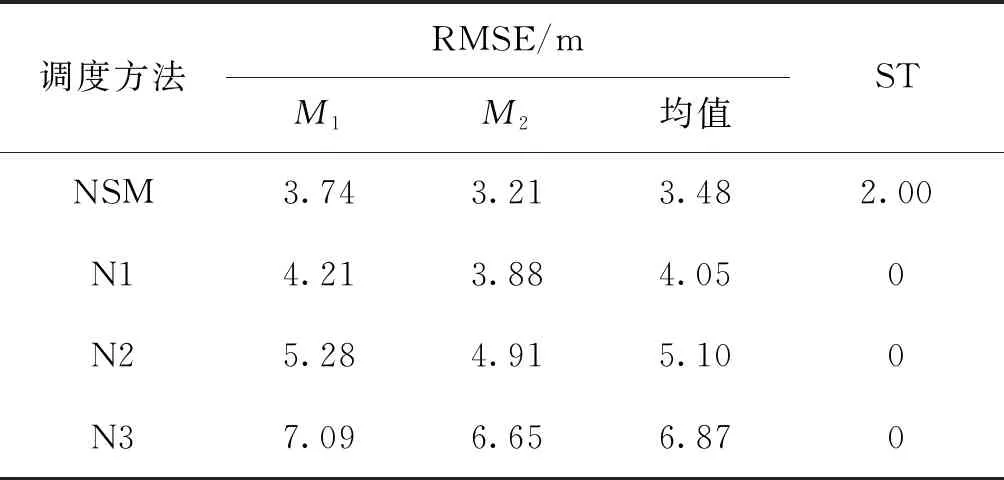
表2 NSM调度及各传感器单独工作时的性能对比Tab.2 Performance comparison of NSM scheduling and each sensor working alone
结合表1和2可知,仅基于传感器和目标间距离进行调度的NSM得到的RMSE要优于本文所提MTSM,高于短时调度MSM。但由于影响跟踪精度的约束条件不仅只有距离,还必须考虑传感器的探测性能,所以,NSM的原理与实际情况不符,在传感器调度中并不适用。
仿真可知,相较于其他调度方法以及单传感器目标跟踪,MTSM能够在保证跟踪精度的基础上,实现对传感器切换代价的高效控制,更加符合实际跟踪情况,具备一定的优势。
3.2 目标跟踪精度阈值对调度性能的影响
从表1中可知,随着目标跟踪精度阈值的增加,本文所提MTSM调度得到的RMSE和ST发生了明显变化,为进一步分析阈值ρth对MTSM调度性能的影响,在[0 m,30 m]区间内间隔0.5 m采样,进行仿真实验与分析,其余参数设置不变。如图5所示为不同跟踪精度阈值条件下,采取MTSM进行调度所得到的RMSE和ST变化情况,图6则为仿真时间内满足阈值要求的采样时刻数。
从图5可知,随着跟踪精度阈值的增加,RMSE先增大再减小后保持平稳,而ST先减小再增大后保持平稳。同时,在阈值ρth≥7 m时,RMSE及ST开始趋于稳定,且ρth在区间[7 m,30 m]内的平均RMSE=3.44 m,平均ST=20.86,而ρth=0 m时RMSE=3.45 m,ST=21.40,可见在ρth=0 m及ρth≥7 m时,MTSM的调度性能基本相同。
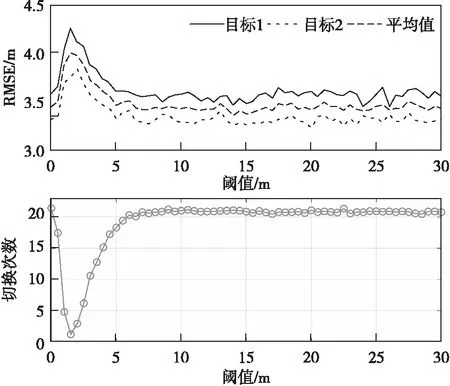
图5 不同跟踪精度阈值条件下MTSM的调度性能Fig.5 Scheduling performance of MTSM under different tracking accuracy thresholds
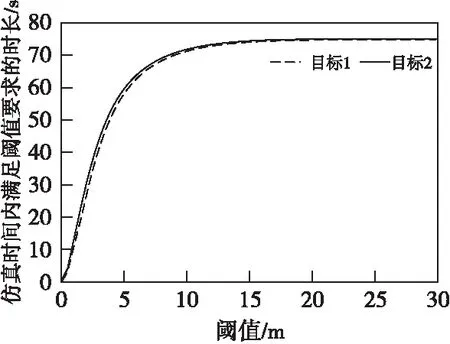
图6 不同跟踪精度阈值条件下任务时间内满足阈值要求的时长Fig.6 Time to meet threshold requirements within the mission time under different tracking accuracy thresholds
而当ρth在 (0 m,7 m)区间内时,由于阈值的限制,MTSM在调度中出现舍去可行解的情况,并随着ρth的增大,出现该情况的时刻相应增多,导致RMSE增大,但当ρth增加到1.5 m时,从图5可知,此时RMSE=4.01 m,ST=1.24,且通过仿真可知调度序列中传感器1的占比达到了96.51%,说明在ρth≤1.5 m时,阈值的限制作用会随着ρth的增大而增强,逐渐舍去了传感器2和传感器3,导致调度效果变差;而在ρth≥1.5 m时,跟踪精度满足阈值要求的时刻逐渐增多,阈值限制作用减弱,调度效果得到改善。
因此,可以通过调整跟踪精度阈值,实现对目标跟踪精度和传感器切换代价的有效控制。在本文仿真条件下,建议跟踪精度阈值可以在区间[1.5 m, 7 m]内选取。
3.3 最小工作时长对调度性能的影响
由于本文所提MTSM的长时属性是由最小工作时长φ所赋予的,为进一步分析研究φ对调度性能的影响,分别在[1 s,75 s]区间内按照系统采样时间间隔1 s对φ进行取值,开展仿真实验。为便于对结果进行分析比较,设定3台传感器的最小工作时长相同。同时通过3.2节仿真可知,阈值会对调度性能产生较大影响,为确保实验的准确性,规定ρth=0 m,以隔绝跟踪精度阈值干扰。不同最小工作时长下MTSM调度得到RMSE和ST对比情况如图7、图8所示。
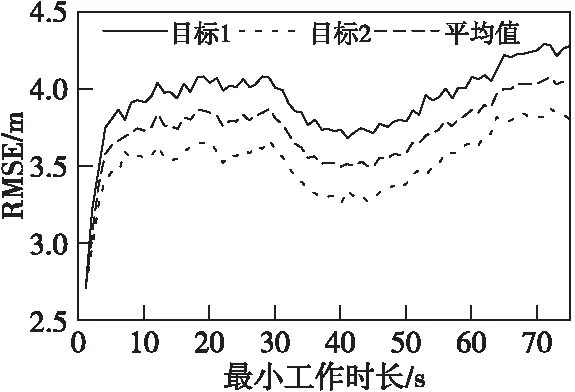
图7 不同最小工作时长下MTSM调度得到的RMSEFig.7 RMSE obtained by MTSM under different minimum working timestep
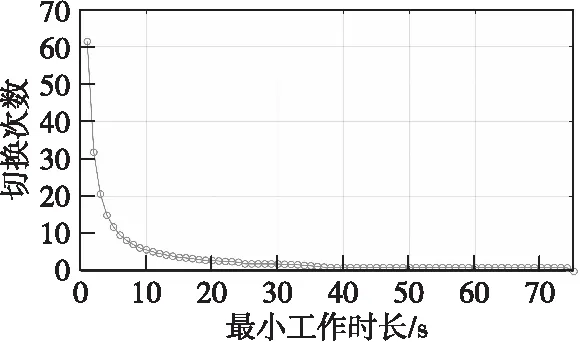
图8 不同最小工作时长下MTSM调度得到的STFig.8 ST obtained by MTSM under different minimum working timestep
从图7可知,随着最小工作时长φ的增加,RMSE先是逐渐增大,随后由于传感器位置和性能、目标运动轨迹等仿真条件的限制,以及噪声干扰等多种因素的综合作用,在[10 s,44 s]区间内表现出先平稳再降低再平稳的趋势。
当φ≥44 s之后,RMSE又逐渐增大,结合图4(d)和表2分析原因,随着φ的进一步增加,初始时刻决策得到的最优传感器将固定为单独跟踪时RMSE最低的M1,但由于其在44 s之后的局部跟踪精度低于M2,所以随着φ的增加,M1的工作时间增加,M2的工作时间减少,导致RMSE增大,直至φ=75 s时,调度序列全部为M1,得到的RMSE和ST与M1单独工作时的一致。
本文仿真条件下,为在降低切换代价的同时,避免单个传感器长时间的工作,结合图7和图8,建议最小工作时长φ在区间[2 s,9 s]内选取。
4 结论
本文以多传感器跟踪多目标为应用场景,利用IMM-FQPF滤波算法和PCRLB实现目标跟踪精度预测,引入最小工作时长约束策略,提出切换代价控制的调度方法MTSM。仿真实验表明,所提最小工作时长约束调度方法MTSM跟踪效果稳定,在保证一定目标跟踪精度的基础上,有效降低了传感器切换代价;同时,可依据实际任务需求,通过改变目标跟踪精度阈值和最小工作时长的大小,对调度方法的优化性能进行调整,最后给出了目标跟踪精度阈值和最小工作时长的取值建议。
