基于双通道GoogLeNet网络的旋翼无人机分类*
2022-08-26孙延鹏任广龙屈乐乐
孙延鹏,任广龙,屈乐乐,刘 妍
(1.沈阳航空航天大学 电子信息工程学院,沈阳 110136;2.南方航空股份有限公司沈阳维修基地,沈阳 110169)
0 引 言
旋翼无人机由于具有比传统无人机更易操控、更加便宜的特性,近年来广泛应用于拍摄、航空物流、环境监测等领域[1-2]。出于增强旋翼无人机使用的规范性、保护人民群众的隐私和生命财产安全以及在禁飞区可以对旋翼无人机进行有效监测的目的,应对不同类型旋翼无人机进行精确地探测和分类从而实现对旋翼无人机的安全监控。由于雷达具有全天候工作的能力,利用雷达传感器对旋翼无人机进行检测和分类近年来受到了越来越多的关注。
近年来,微多普勒特征[4-5]多被应用于旋翼无人机的目标识别和分类[6]。在此基础上有研究人员通过人工提取旋翼无人机回波数据的微多普勒时频图特征实现了旋翼无人机分类[7],但是通过人工提取特征进行旋翼无人机分类容易导致特征不全。还有研究人员将深度学习应用于旋翼无人机分类中[8],利用深度学习自动提取时频图特征。文献[7]利用人工提取时频图的三维熵特征和节奏频率谱图(Cadence-Frequency Spectrogram,CFS)的特征作为联合特征,并将其输入到支持向量机(Support Vector Machine,SVM)进行分类。文献[8]利用深度学习的卷积神经网络(Convolution Neural Networks,CNN)对时频图进行分类,证实了深度学习技术在旋翼无人机识别中的潜力。文献[9]采用深度卷积神经网络(Deep Convolution Neural Networks,DCNN)对模拟的旋翼无人机微多普勒信号进行分类,并获得了93%的准确率。文献[10]提出了一种基于深度学习的旋翼无人机分类模型,该模型可以学习雷达时频图上目标的微多普勒特征。文献[11]提出了一种基于GoogLeNet架构的旋翼无人机和空中鸟类进行分类的方法,并显示了较高的分类精度。文献[12]通过迁移学习实现了利用多基地雷达对携带有效载荷的旋翼无人机的分类。文献[13]提出了一种将时频图与节奏速度图(Cadence-Velocity Diagram,CVD)拼接在一起的合并多普勒图(Merged Doppler Image,MDI),并将其输入到CNN中进行分类。
上述方法多是用单通道的CNN进行特征提取,但是由于单通道提取的特征过于单一,描述的信号特征不够全面,影响旋翼无人机识别准确率。不同于单通道的CNN提取特征的方法,本文采用双通道CNN进行特征提取获得回波信号的联合特征,并提出一种基于双通道GoogLeNet网络的分类识别方法。该方法将利用两个GoogLeNet网络进行迁移学习来分别对时频图和CVD进行特征提取用以获得联合特征,然后用Softmax分类器进行分类。本文提出的基于双通道GoogLeNet网络的微动特征提取实现旋翼无人机分类识别方法,相较于常见的依赖单通道的CNN的识别方法具有更高的识别准确率。
1 旋翼无人机回波信号分析
对雷达回波信号生成时频图和CVD并将其用于旋翼无人机分类中,不仅可以在时频域显示微多普勒信息也可以在节奏速度域显示微多普勒信息,有利于提取更多的微动特征。
雷达接收信号是待测旋翼无人机上的所有散射点的回波,因此雷达接收到的基带回波信号可以表示为
(1)
式中:n是移动散射体的总数;ai是第i个散射体的反射系数;φi(t)=4πRi(t)/λ是第i个散射体的相位调制,λ为雷达发射信号的载波频率对应的波长,Ri(t)是第i个散射体距离雷达的距离;η(t)为加性噪声。
短时傅里叶变换的基本思想就是把信号划分为许多小的时间间隔,用傅里叶变换分析每一个时间间隔,以便确定该时间间隔存在的频率。
基带回波信号y(t)的短时傅里叶变换数学表达式如下:

(2)
式中:τ为窗函数移动的位置,ω为多普勒频率,窗函数h(t)常用的有海明(Hamming)窗、汉宁(Hanning)窗、高斯窗以及 Kaiser-Bassel窗等。
在微多普勒特征分析中,时频图的频率是一个重要的因素,因为目标的微运动在时频图中被重复地表示。本文引入了CVD来分析时频图的频率,它是通过对时频图的时间轴进行傅里叶变换得到的。CVD突出了微多普勒特征的周期性特征,这是旋翼无人机的显著特征之一,其公式如下:
(3)
式中:f表示为节奏频率。
生成时频图和CVD的流程图如图1所示。

图1 算法流程图
图2为三类旋翼无人机的时频图和CVD,其中左边为每一类旋翼无人机中的时频图,右边为其对应的CVD。在时频图中可以较为明显地看出不同旋翼无人机的图像形状有明显的不同,尤其以直升机表现得最为明显,其频率和时间表现得极为规律。由于不同的旋翼无人机会产生不同的时频图和CVD,因此将它们的特征结合起来后可以从时频域和节奏速度域多方面对旋翼无人机进行描述,更加有利于提高分类结果的准确率。

图2 三类旋翼无人机的时频图和CVD
2 旋翼无人机回波信号分类
2.1 基于时频图的特征提取
文献[8]中提出了基于时频图和CNN的旋翼无人机分类。GoogLeNet网络作为CNN的经典网络,其结构通过引用Inception模块,可以在增加网络深度和宽度的同时减少参数,其网络配置如表1所示。因此本文采用GoogLeNet网络作为特征提取的基础,其通过网络自动提取的方法可以有效避免人工提取所造成的损害。为了利用GoogLeNet网络,测量雷达信号的两种输出图像大小均被保存为224 pixel×224 pixel。

表1 GoogLeNet网络配置表
Inception结构是一种高效表达特征的稀疏性结构。基于底层的相关性高的单元,通常会聚集在图像的局部区域,这就相当于在单个局部区域上去学习它的特征,然后在高层用卷积代替这个区域,当然某些相关性可能是隔得比较远的,通过使用大的卷积核学习即可。Inception单元结构如图3所示。

图3 Inception单元结构图
最初的GoogLeNet网络的最后三层被配置为识别1 000个类别,而本文则用于三分类,因此去掉最后三层,只保留到表1中的dropout层作为迁移学习模式下的GoogLeNet网络构架基础。
单通道GoogLeNet提取时频图特征并应用于分类的流程图如图4所示。

图4 单通道GoogLeNet网络对时频图进行特征提取流程图
虽然对于不同类型的旋翼无人机的旋翼数目的区别可以看出时频图的差异性,但是如果仅用回波信号的时域特征对旋翼进行分类尚存在一定不足:在噪声环境下,当旋翼无人机的速度和方向不同时,其时频图也可能发生变化。因此,本文补充CVD作为回波信号的频域特征,这样从多个维度对旋翼无人机进行分类更加有利于提高准确率。
2.2 基于CVD的特征提取
CVD作为回波信号的频域特征,其是对微多普勒时频图进行傅里叶变换得到的。由于CVD具有不依赖于旋翼的初始相位,可以显示时频图中微多普勒的周期性特性而常被用于旋翼无人机分类中。因此,可以将GoogLeNet网络对CVD的特征提取应用于对旋翼无人机的分类上。单通道GoogLeNet网络对CVD进行特征提取并应用于分类的流程图如图5所示。

图5 单通道GoogLeNet网络对CVD进行特征提取流程图
2.3 softmax分类器
在完成特征提取后就要用到分类器来对目标进行识别和分类,此时选择合适的分类器就极其重要。本文采用Softmax分类器。Softmax在机器学习中有着非常广泛的应用,其计算简单,效果显著。Softmax回归模型是Logistic回归模型在多分类问题上的推广,当分类数为2的时候会退化为Logistic分类。
Softmax用于三分类时,它将CNN输出的特征映射到(0,1)区间内,而这些值累加和为1,其可以看成概率来理解,在最后选取输出节点的时候选取概率最大的值,从而来进行三分类,而对于使用梯度下降优化算法来最小化代价函数,其使用交叉熵损失函数。
而对于分类器的输入,本文采用级联的方法将两个CNN提取出来的特征相连,通过联合特征的形式可以使Softmax分类器从多方面对需要分类的目标进行分析,以使其达到更高的准确率。
综上所述,本文构建的双通道GoogLeNet网络的分类识别算法流程如图6所示。
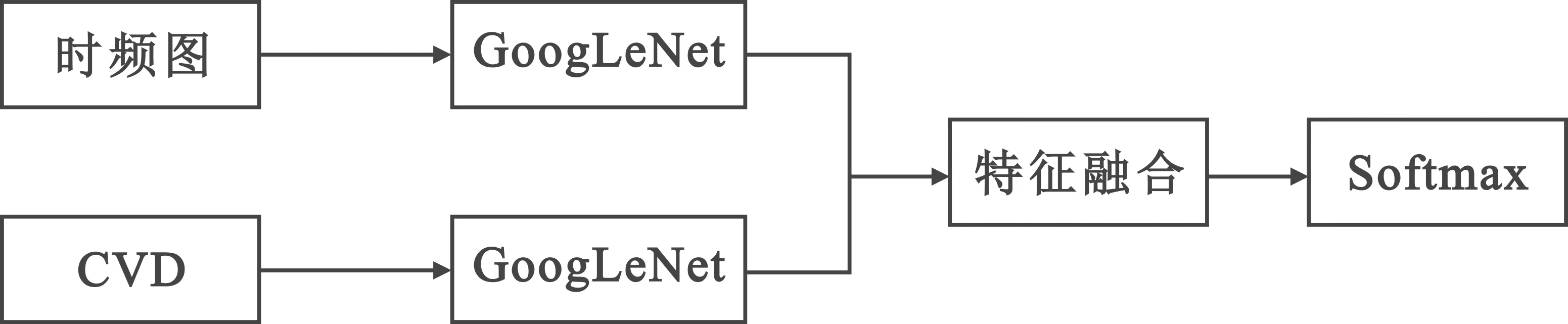
图6 双通道GoogLeNet网络的分类识别算法流程图
3 实测数据结果分析
3.1 实验设置及数据采集
本次实验采用K频段连续波雷达对无人机进行实际测量,其载频24 GHz,基带采样频率128 kHz,发射功率16 dBm,天线增益15 dBi。
实验中使用三种旋翼无人机,分别是直升机、四旋翼无人机以及六旋翼无人机,其模型如图7所示。

图7 三类无人机模型图
实测实验时的场景如图8所示。旋翼无人机与雷达传感器中心之间的初始距离为0.9 m,实际测量回波信号时每类旋翼无人机重复测量84次。

图8 实测场景图
对雷达采集接收到的信号依次进行去均值及滤波处理,其中滤波器选择为巴特沃斯(Butterworth)低通滤波器,参数设置为通带截止频率4 kHz,阻带截止频率9 kHz,可以有效滤除信号中的噪声,在保留信号特性的基础上使信号平滑消减干扰因素。将每个测量的回波数据进行分割成5段,每段长度为0.3 s。在0.3 s时长内的数据点长度足以保证回波数据中可以包含若干个周期的雷达回波反射信号,确保可以获得精确的微多普勒调制参数。每一类无人机的数据总数为(5个分段)×(84次重复)=420个。
3.2 数据结果分析
每一类旋翼无人机的信号数据总量为420个,为了评价该方法的分类性能,取其中70%为训练集,30%为测试集。通过测试得到的分类性能如表2~4所示。

表2 仅对时频图进行特征提取的无人机分类混淆矩阵

表3 仅对CVD进行特征提取的无人机分类混淆矩阵
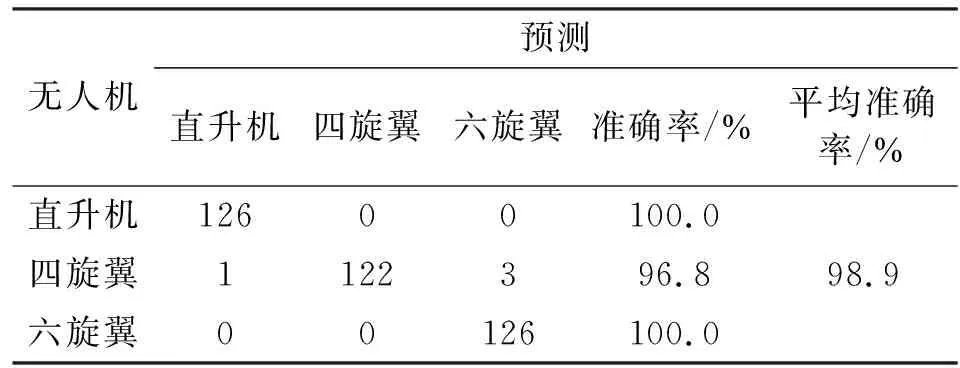
表4 对时频图和CVD同时进行特征提取的无人机分类混淆矩阵
从表2~4可以明显看出,双通道网络同时提取时频图和CVD的特征的效果是优于仅使用时频图或仅使用CVD来进行分类的。这是由于仅使用时频图进行特征提取只能够在时域上对微多普勒信号的特征进行描述,不能摆脱旋翼无人机初始相位的随机性受其旋翼位置的影响,所以会降低旋翼无人机分类的准确率。而本文在时频图的基础上引入了CVD,CVD可以分析微多普勒特征的频率,不依赖于旋翼无人机旋翼的初始相位,将时频图和CVD的特征连在一起,可以从时频域和节奏速度域描述回波信号的特征,因此同时提取时频图和CVD的特征可以提高无人机分类的准确率。而且本文使用双通道CNN,该网络有效地实现了同时提取时频图和CVD的特征,并通过特征融合使得可以同时对回波信号的时频域和节奏速度域的特征进行描述,对于特征提取的强度明显高于单通道的,这也验证了双通道网络的有效性。
从表4可以看出,四旋翼的识别准确率最低,其容易跟直升机和六旋翼产生混淆。这是因为直升机的时频图分布比四旋翼和六旋翼更为集中,所以直升机更容易被区分出来。而当直升机和四旋翼的旋转主频较为接近且噪声较强时,使得CVD的特征不是十分明显,这就导致了识别出错率更高。
3.3 不同算法对比的结果分析
为了进一步说明本方法的优越性,在相同的实验数据下,将本文所提方法与文献[13]和文献[7]方法进行对比,对三种旋翼无人机的识别率实验结果如表5所示。

表5 各种实验结果对比
从表5可以看出所提方法比前人所提方法在识别准确率上有了显著的提升。文献[13]中单通道GoogLeNet网络提取的特征单一,不能对MDI进行有效的分析;文献[7] 则因手动筛选特征而导致特征不够全面,从而影响了其识别能力。而本文所提方法利用双通道GoogLeNet网络同时对时频图和CVD进行特征提取,双通道GoogLeNet网络通过计算机自主提取特征不仅避免了人工提取所能造成的误差,也可以同时从时频域和节奏速度域两个方面提取有用的特征信息,更加有利于无人机的分类。
4 结束语
本文基于双通道GoogLeNet网络提出了一种新的特征提取方法用于旋翼无人机分类。基于实测回波信号的实验结果表明,采用双通道GoogLeNet网络同时对时频图和CVD进行特征提取进一步提高了旋翼无人机分类的准确率,可达到 98.9%。
下一步工作将对多架旋翼无人机同时出现进行分类研究,以使该算法拥有更为广阔的应用前景。
