国产智能气压测量仪实验室校准方法研究
2022-08-26马修才郑树芳牛永红刘海珍
马修才,重 阳,郑树芳,牛永红,刘海珍
(1.内蒙古自治区大气探测技术保障中心,呼和浩特 010051;2.内蒙古自治区气象信息中心,呼和浩特 010051)
0 引言
目前用于地面气象观测中大气压力测量设备,主要是硅电容式数字气压传感器[1]。现阶段全国50 000多个包括国家级和区域自动气象观测站所采用的硅电容式数字气压传感器主要为芬兰VAISALA进口产品[2],型号包括PTB210、PTB220和PTB330。PTB系列的气压传感器[3-4]具有高采样率、高分辨力、测量稳定可靠等优点,且均具备误差调整功能以使其测量误差控制在允许的范围内[5-7],然而其价格昂贵,地面气象观测站点逐步密集化必将带来更高的业务运行成本,因此数字气压传感器亟需国产化。另外,国内现有自动气象站主要采用“采集器+传感器”的结构[8],不利于传感器间的互换、标定和管理,中国气象局于2017年底发布了《智能气压测量仪功能规格需求书》(后续简称《需求书》),促进数字气压传感器国产化,推动传感器智能化发展。
目前已有多个国内厂商根据《需求书》设计开发了相关智能气压测量仪产品,2021年4月,中国气象局综合观测司发布了“2021年度综合气象观测试验目录”,将国产化气压传感器对比观测试验列为其中一项任务。国产气压传感器已进入场外实际对比观测中,随之而来的便是如何开展其实验室检定/校准的问题。本文选用上海气象仪器厂的DYG4型智能气压测量仪,探索在实验室环境条件下国产智能气压测量仪的校准方法,在校准方法研究的基础上设计了数字式气压计自动化校准的系统方案[9-10],对示值误差测量结果的不确定度展开评定[11-14],并通过实验室比对[15-16]的方式验证校准方法的合理性、校准结果的可靠性,以期对国产智能气压测量仪量值溯源工作带来参考价值。
1 DYG4型智能气压测量仪
DYG4型智能气压测量仪(后续简称DYG4)按照《需求书》的要求设计,其产品技术手册中的技术指标满足《需求书》中对仪器测量性能指标的要求,具体如表1所示。

表1 DYG4主要测量性能指标 hPa
外部接口方面,DYG4使用5芯的针型航空插头向用户提供供电和通信接口,如图1所示。DYG4适应直流9~15 V的宽电压供电,对外直接输出数字信号的测量结果,通信接口为标准的三线制RS232串行接口。

图1 DYG4外部接口
DYG4引脚定义见表2。用户可以定制外部线缆将传感器接入测量系统中,例如一头为5针航空插头母头连接DYG4,另一头为接线端子或DB9等接入测量系统。

表2 DYG4外部接口引脚定义
DYG4默认通信协议为“96008N1”,即波特率9 600,8位数据位,无校验位,1位停止位。其通信命令及数据格式符合《需求书》要求,传输模式有主动和被动两种,被动传输时需要用户发送“READDATA”命令DYG4才会返回存储中的最近一条数据,主动模式时无需用户发送命令,DYG4会根据设置的发送间隔主动发送数据。表3中列出了实验室校准时需要用到的DYG4通信命令。

表3 DYG4部分通信命令
另外,DYG4数据格式严格遵循《需求书》要求,“BG,001,81234,311719,1213941,00040,14,YTPS,000,20001105103100,001,002,02,AGA,08917,AGAl,000423,00,z,0,xA,7,5653,ED”为其一帧完整的数据包示例,数据包以“BG”字符开头,“ED”字符结尾,中间数据又分前段的数据包头和后段的数据主体及校验码,各要素之间通过“,”分割,“AGA”之前的数据为版本号、区站号、经纬度、海拔等站点及传感器标识等包头信息,“AGA”后为观测要素变量和对应的数据。其中“AGA,08917”表示分钟气压为891.7 hPa,“AGAl,000423”表示气压分钟标准差为0.0423 hPa。有时数据中会出现“AGA,/////”,表示数据未准备好或某段时间内气压变化过快。数据帧分析和提取分钟气压及标准差信息对后续实现DYG4自动化校准软件尤为重要。
2 校准方法
目前国内现行有效的适用于数字气压测量仪量值溯源的规范性技术文件为《JJG1084―2013 数字式气压计检定规程》[17](以下简称《规程》),另外《JJG(气象)001-2015 自动气象站气压传感器检定规程》虽然也可用于自动气象站气压传感器的检定/校准,但其适范围为模拟信号输出的传感器。根据《规程》选择满足相应指标要求的标准器及配套设备,与被校准仪器组成校准链路(包括通信和气路连接),参照《规程》规定的方法进行DYG4主要测量技术指标的测试实验。
2.1 校准所用的标准器和配套设备
《规程》要求作为标准器的数字气压计最大允许误差不能超过被检仪器最大允许误差的三分之一,因此按《需求书》和DYG4技术手册上±0.2 hPa的最大允许误差,用于检定/校准DYG4的数字气压计的气压标准器误差需在±0.067 hPa范围内,即准确度等级需要优于0.01级(0.01级即最大允许误差为±0.1 hPa)。而目前国内绝大部分省级气象计量实验室中配备的气压标准器均为0.01级,无法满足作为0.02级(最大允许误差±0.2 hPa)被检仪器的标准器的要求。而中国气象局发布的《地面气象自动观测规范》和国家标准《自动气象站观测规范》[18],对地面气象观测仪器技术性能做出了要求,其中将气压测量仪器的最大允许误差规定为±0.3 hPa,因此我们将DYG4降级为0.03级数字气压计进行校准也是符合气象观测要求的。因此选择0.01级数字气压计作为DYG4校准用标准器是合理的。
另外我们需要压力控制设备控制不同的气压校准点,在压力控制箱和压力控制器两者中选择后者作为压力控制设备,原因主要有两点:一是组成的气路连接密闭空间更小,压力控制器控制速率更快,也能更快稳定,二是压力控制器可溯源性更优。表4列出了校准所采用的标准器和配套设备信息。

表4 标准器和配套设备信息
2.2 校准项目及数据处理原则
主要进行示值误差、回程误差和测量结果重复性3个方面的测试。
2.2.1 示值误差
需要在DYG4测量范围内均匀选取不少于6个整10 hPa点作为校准点,实际选取500 hPa、600 hPa、700 hPa、800 hPa、900 hPa、1000 hPa、1100 hPa共7个点。DYG4准确度优于0.05级,需要进行2次压力循环,即500 hPa→1100 hPa→500 hPa→1100 hPa→500 hPa,整个校准过程的校准点见图2,正行程、反行程各进行2次,共28个校准点。

图2 整个校准过程的校准点
每个校准点稳定后1分钟后开始读取气压参考值和DYG4气压值,每间隔1分钟读一组,每个校准点共读N组数,本文校准中N实际取3。按式(1)、(2)计算整个过程中各个校准点的参考气压平均值和示值平均值,按式(3)到式(5)计算DYG4在各校准点的示值误差。
(1)
(2)

(3)
(4)

(5)

2.2.2 回程误差
DYG4在各校准点的回程误差按照式(6)计算得到,该值不能超过最大允许误差绝对值的一半。
(6)
式中,△pe为DYG4的回程误差。
2.2.3 测量结果重复性
可以通过测量结果重复性来评估校准过程中所有的随机效应对校准结果的影响。设某校准点的测量结果序列为[y1,y2,…,yn],通过式(7)来计算测量结果的重复性。
(7)

在评估重复性时,n取值一般不少于10次,若重复性较小,不构成测量结果不确定度评定中的主要分量时,在日常的检定/校准中,测量序列的值可以适当减小,但当序列长度小于6时,则不可以用式(7)来进行测量结果重复性的评估,可采取极差法代替。本文校准方法中,每个正、反行程各个校准点读数3次,则各校准点在整个校准过程的测量序列长度为12,满足用式(7)评估测量结果重复性的要求。
2.2.4 异常值的剔除
若测量序列中含有个别数据明显差异与其他数据时,常常认为这些个别数据为可疑数据或异常值,正确判断和移除异常值是获得可观测量结果的重要手段[19]。常用的异常值判断准则有Grubbs准则、3σ准则和Dixon准则,综合比较后,选择改进型的Grubbs准则进行本文校准方法中异常值判断。
设测量序列在某校准点的测量序列为[x1,x2,…,xn],假设xd为可疑数据,若式(8)成立,则可判断xd为异常值,可以考虑剔除。
(8)

Grubbs准则中s在测量序列n≥6时采用式(7)求得,而本文校准方法中各独立校准点的示值误差序列为3,此时s使用式(9)的极差法求得:
(9)
式中,xmax为序列中的最大值,xmin为序列中的最小值,dn为极差法估计系数,通过查表得到。
2.2.5 数据修约
对于中间结果和最终测量结果,均采用工程修约(四舍六入,逢五取偶)的原则进行数据修约。
2.3 校准步骤
按图3连接好待校准仪器和标准器、配套设备,预热好气压标准器和压力控制器,开始按预设的校准点进行校准。设置压力控制器稳定到预设校准点,稳定后读取气压标准器、DYG4的气压值,以经过修正后的气压标准器气压值为气压参考值,经过异常值判断、剔除后,每个校准点的有效测量序列长度为3,直至完成所有预设校准点的校准,按2.2的数据处理原则进行数据处理。

图3 设备连接
3 自动校准系统设计
3.1 系统结构
为了方便后续实现自动化的校准系统,测量链路所涉及的设备均选择具有远程控制功能,系统由运行于业务计算机的传感器校准系统软件和用于采集和控制智能型气压测量仪、压力控制器、气压标准器的硬件设备,结构如图4所示。系统可支持DYG4自动化校准,同时也支持PTB系列气压传感器。

图4 气压测量仪自动化校准系统组成结构
3.2 多通道连接器
其中多通道连接器可集中为8通道的待校准仪器提供供电和到电脑采集端的通信连接,其结构和外部接口分别如图5、图6所示。

图5 多通道连接器内部结构
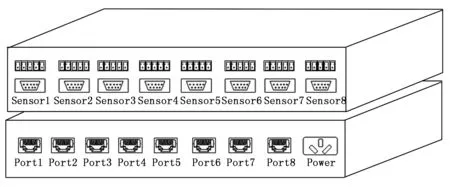
图6 多通道连接器外部接口
多通道连接器采用12V 5A的直流开关电源为各通道待校准仪器供电,DYG4整机功耗不超过1.5 W,PTB系列传感器功耗不超过6 W,满足8通道待校准仪器同时接入的功耗需求。多通道连接器外部接口中,与被校准仪器连接端采用DB9和接线端子两种方式,DYG4传感器通过5针航空插头转DB9或接线端子的线缆接入传感器,与串口服务器端采用RJ45接口,通过直连网线与串口服务器连接。
3.3 自动化校准软件
在校准方法研究基础上,设计了用于DYG4和PTB系列气压传感器自动化校准的应用软件,将校准方法程序化实现,可实现校准点控制、标准气压值采集、被校准仪器气压值采集,将2.2节中校准项目均在软件实现,数据处理也与软件后台算法实现。软件基于.net framework框架,基于WinForm技术,后端控制流程和相关算法采用c#语言实现,可同时支持8通道被校准仪器的自动化校准任务。
3.3.1 校准软件主任务流程
校准软件主任务的流程如图7所示。首先根据软件界面预设的气压校准点控制列表开始校准点控制循环,气压稳定后,开始获取气压参考值和被校准仪器气压值,对每个气压校准点进行异常值的判断和剔除,保存数据并更新数据列表,完成当前校准点的校准后进入下一个气压校准点,直至控制列表循环完成,最后进行包括示值误差、回程误差、测量结果重复性在内的校准结果处理,完成本次校准。

图7 校准软件主任务流程
3.3.2 改进Grubbs准则的程序实现
主程序在某气压校准点读取第三次气压标准值或被校准仪器气压值时,调用异常值判断子程序,传入参数为三次测量值的数组,返回为异常值的数组下标或者-1,返回-1表示数组无异常值。当有异常值时主程序舍弃该数值,重新进行第三次测量,直到数组无异常值。基于改进型Grubbs准则的异常值判断子程序流程如图8所示。
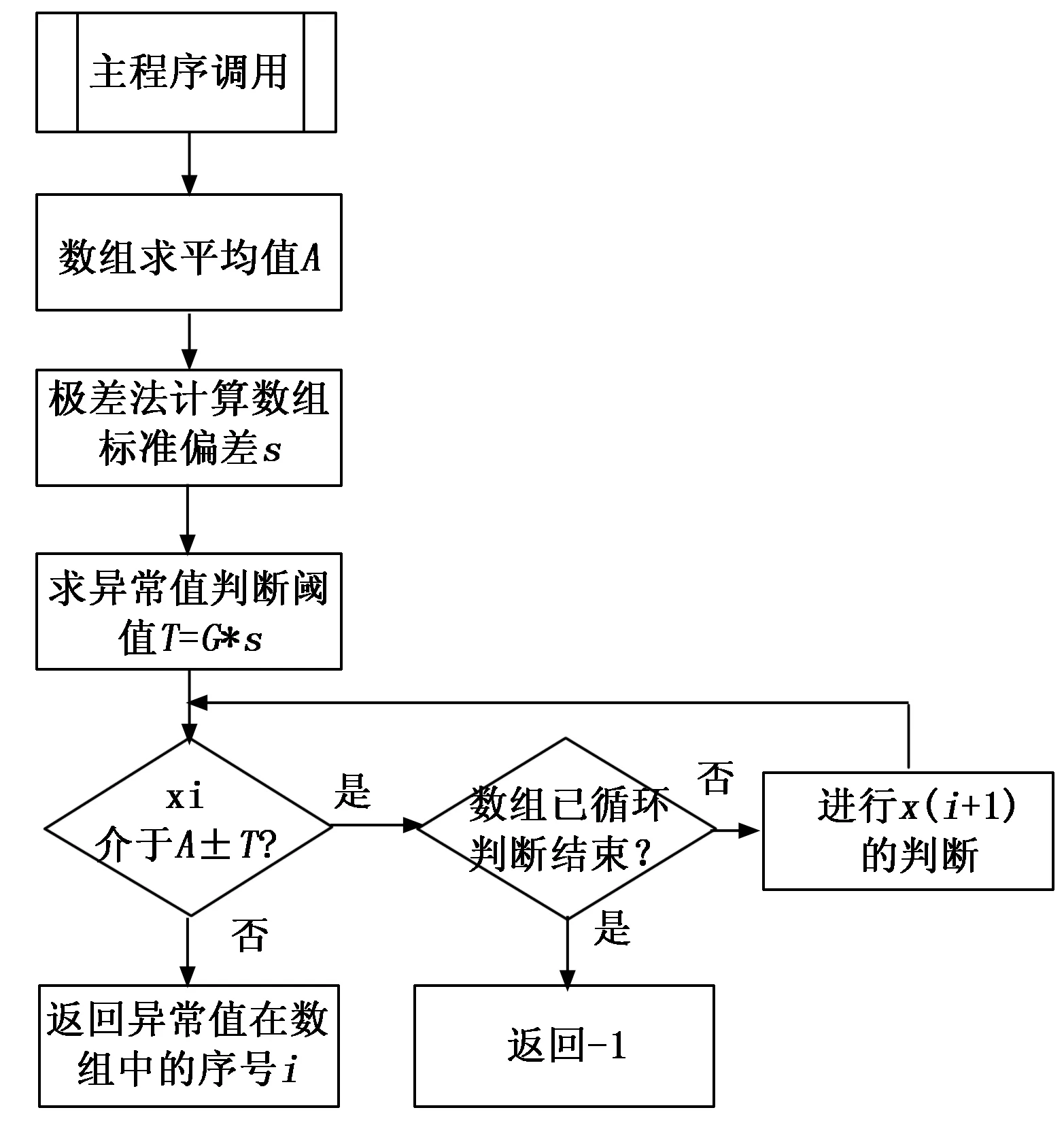
图8 异常值判断函数流程
首先对数组求平均值A,用极差法求数组的标准偏差s,再求出异常值判断阈值T,若数组元素不介于A±T之间,表明该元素数据为异常值,返回该元素的数组下标,结束子程序,若数组元素介于A±T之间,表明该元素不是异常值,再对下一个数组元素执行相同的判断,若直至数组所有元素判断完成都无异常值,向执行调用操作的程序返回-1,结束子程序。
4 校准结果分析及不确定度评定
实际校准中,根据第2节中的校准方法,利用第3节的自动化校准系统,选择DYG4、PTB210、PTB220、PTB330各一台进行校准。
4.1 校准结果
DYG4的校准数据对各个校准点三次测量取平均值后的结果见表5,限于篇幅原因文中只列出了DYG4的校准数据。

表5 DYG4校准数据
各校准点的示值误差校准结果见表6。
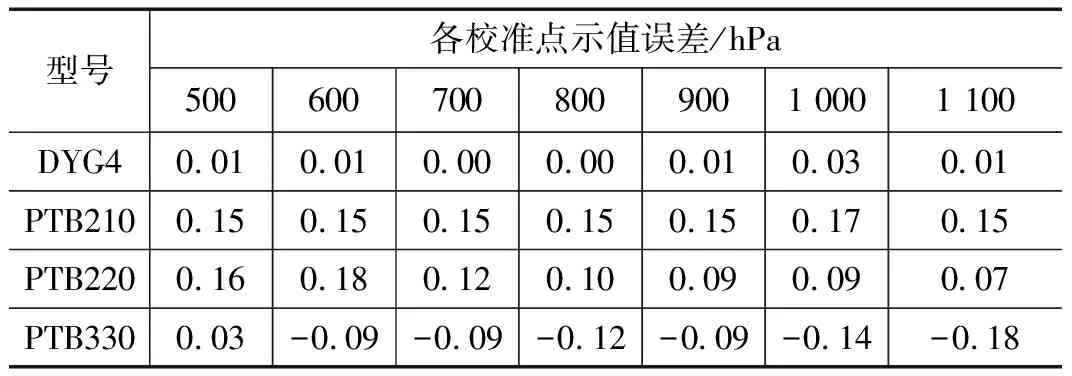
表6 示值误差校准结果
各校准点的回程误差校准结果见表7。

表7 回程误差校准结果
各校准点的测量结果重复性校准结果见表8。

表8 测量结果重复性校准结果
由于DYG4的分辨力为0.1 hPa,本次校准中,其校准结果若按其分辨力能达到的小数位数修约,修约后各校准点的示值误差均为0.0,回程误差也为0.0,测量结果的重复性除了1 100 hPa点达到了其分辨力的1/5,其余各校准点均达到其分辨力的1/10。
出现上述校准结果的原因,与DYG4的设计原理有很大关系。DYG4采样率为30次/分钟,其向外输出数据位分钟算术平均值,因此在压力控制器达到稳定后,DYG4表现为示值十分稳定,其测量结果的重复性更多的是由标准器的气压值变化引起的。
4.2 示值误差测量结果的不确定度评定
根据第2节的研究内容可知,示值误差的最终结果为各个校准点气压示值平均值和气压参考值平均值之差,故可得出式(10)所示的示值误差测量模型:
△p=p′-p
(10)
式中,△p表示示值误差,p′表示被校准仪器示值,p表示气压参考值。
p′与p相互独立,则合成标准不确定度可由式(11)求得:
(11)
式中,uc表示合成标准不确定度,u(p′)表示被校准仪引入的不确定度分量,u(p)表示气压参考值引入的不确定度分量。
4.2.1 不确定度来源分析
综合考虑来自被测仪器示值和参考气压引入的不确定度,得到表9所示的不确定度来源。

表9 不确定度分量
4.2.2 由被测仪器示值引入的标准不确定度
1)由测量重复性引入的标准不确定度:由于最终测量结果由测量序列的平均值得到,则测量重复性引入的标准不确定度由式(12)求得,结果见表10。
(12)
式中,u表示测量重复性引入的标准不确定度,s表示测量序列标准偏差,由式(7)求得,n表示测量序列长度,本校准中为12。


表10 测量重复性引入的标准不确定度

表11 仪器分辨力引入的标准不确定度
被测仪器引入的标准不确定度应综合上述两种情况取其中较大者,因此被测仪器引入的标准不确定度u(p′)结果见表12。

表12 被测仪器引入的标准不确定度
4.2.3 由参考气压值引入的标准不确定度
3)高度差引入的不确定度:校准中我们已将气压标准器和被校准仪器放置于同一水平面,由高度差引起的不确定度忽略。
4.2.4 标准不确定度的合成
由式(11)计算得到合成标准不确定度结果见表13。

表13 合成标准不确定度
4.2.5 扩展不确定度
按照正态分布,包含因子取2,示值误差测量结果的扩展不确定度结果见表14。

表14 合成标准不确定度
5 校准结果验证与分析
为验证校准结果的有效性,以及测量不确定度评定的合理性,将校准用的DYG4传递到同等级的其他三家实验室,以同样的校准程序进行比对校准,将各实验室的校准结果汇总,根据式(13)计算归一化偏差,结果如表15所示。
(13)
式中,En表示归一化偏差,xi表示参比实验室示值误差结果,x0表示参考示值误差结果,Ui为参比实验室的不确定度,U0参考不确定度。

表15 参比实验室归一化偏差绝对值
当En绝对值小于等于1时,表明比对结果满意[20],表15结果表明,参比实验室在各个气压校准点的对比结果均较为理想,说明校准结果可观,测量不确定度评定合理,校准方法有效。
6 结束语
1)由于DYG4设计时气压输出值为分钟平均气压,与自动站观测规范相关技术要求一致,而PTB系列气压传感器输出瞬时气压,是造成校准结果中PTB系列气压传感器测量重复性大于DYG4的主要原因;
2)虽然校准中的DYG4示值误差结果非常小,但其不确定度却高于PTB系列传感器,高出的部分主要是由于分辨力引起的;
3)本文选取的校准样本虽然不多,但由实验室比对的结果可以证明本文的校准方法合理、有效。本文的校准结果也表明,国产智能型气压测量仪用测量不确定度来表述测量结果比经典误差理论更合理。
