基于MR混合现实技术的轨道交通车辆检修仿真平台研究与实现
2022-08-24杨浩坤杨翠蕾
冯 博 杨浩坤 杨翠蕾
(石家庄铁路职业技术学院 河北石家庄 050041)
1 引言
近年来,随着混合现实技术的发展与成熟,其应用领域也在逐步扩大。尤其是在要求重复操作实践、现实操作空间受限、操作对象繁琐庞大、工作内容风险高等情况下,混合现实技术能够较好的解决难题,而轨道交通车辆检修行业正具有以上特点。因此,将新技术应用于轨道交通车辆检修行业,以满足新形势下对轨道交通车辆检修人才培养的要求已成为当务之急。
我们团队经过市场调研、社会实践、产品研发,项目落地等环节,设计并研发了一套完整的针对于轨道交通车辆检修相关专业、不同岗位、不同工种的虚拟仿真平台。利用计算机三维仿真,混合现实等技术,在虚拟场景中对轨道交通车辆零部件进行虚拟拆装、车辆检修等,实现对车辆检修的认知、教学、实训和考核等功能,使学习者足不出户便可以做进行学习培训,获得与真实实验一样的体会。
2 平台系统架构及设计流程
2.1 平台整体架构
基于MR混合现实技术的轨道交通车辆检修仿真平台包含基于PC端、安卓移动终端、MR智能眼镜端的三平台轨道交通车辆检修仿真系统。其中:
(1)PC端系统是以Windows系统的PC为硬件平台的城轨车辆检修仿真实训系统;
(2)安卓移动终端系统是以Android系统的移动终端为硬件平台的城轨车辆受电弓仿真培训系统;
(3)MR智能眼镜端系统是以双目MR全息智能眼镜为硬件平台的城轨车辆转向架实训系统。三个系统既可以独立使用,部分软件资源又可以实现共享。平台整体组成如图1所示。

图1 平台整体组成框图
2.2 硬件设备介绍
(1)PC设备
考虑到城轨车辆检修仿真实训系统发布运行平台为PC端,因此为实现今后测试的最大效果,调试环境选择软硬件符合系统运行的PC机进行。
(2)安卓移动终端设备
安卓移动终端设备是运用AR技术,并配合自主制作的活页式教材中配套的数字化模型资源和动画资源,完成城轨车辆受电弓仿真培训系统的调取和运行,且移动端设备具备二维码扫码功能。
(3)MR智能眼镜设备
MR智能眼镜设备是在屏幕上把虚拟世界套在现实世界,并进行互动。利用实时地计算摄影机影像的位置及角度并加上相应图像、视频、3D模型的技术,配合混合现实理论教学包资源,完成对城轨车辆受电弓仿真培训系统实时工作的硬件部件与软件系统的协同实现。
MR资源交互方式包括手势交互、手柄交互和按键交互。MR终端选用了影创公司的Action One PR O混合现实双目眼镜作为硬件开发平台。设备实物图及相关参数如图2所示。

图2 设备实物图及相关参数
2.3 设计流程
在充分学习研究了硬件平台和相关应用软件的基础上,重点对系统平台的软件资源进行设计开发。将软件的设计制作分为脚本设计和虚拟仿真软件开发两部分,设计总流程如图3所示。
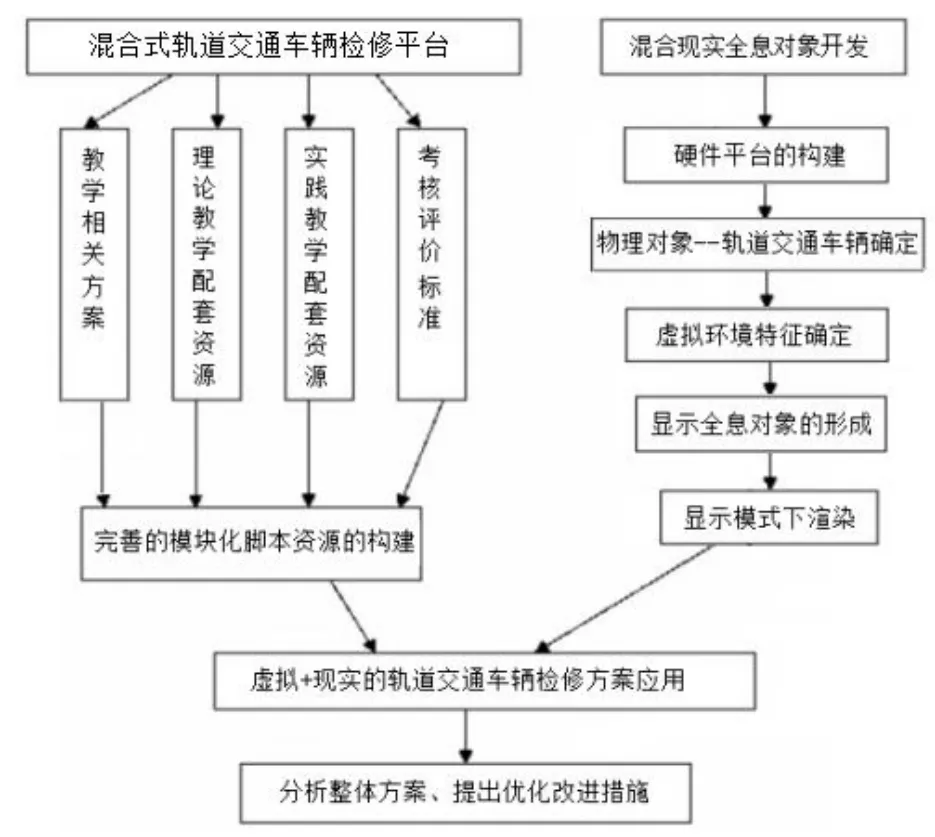
图3 系统软件设计总流程框图
3 MR城轨车辆转向架实训系统软件设计
3.1 设计思路
该系统是基于影创公司的MR眼镜为平台进行开发,旨在对城轨车辆的转向架系统进行结构认知与典型实训任务的学习。借助混合现实技术,将转向架的三维虚拟模型用全息影像的方式投射到用户的眼前,通过与虚拟对象进行交互实现三维模型的操作。整体架构如图4所示,分为三层:

图4 MR城轨车辆转向架实训系统架构图
(1)表现层
呈现给用户体验和操作窗口,MR眼镜可实现系统的人机交互(按键、手柄、手势),以及转向架三维模型和视频资源的实时渲染效果展示。
(2)应用层
设计作用的载体,轨道车辆转向架系统的虚拟设计功能全部在应用层完成,包括转向架系统的结构认知和典型实训任务学习。转向架的结构包括:悬挂系统、牵引电机、齿轮箱等结构的认知及爆炸拆解。典型实训任务包括:轮对测量、高度调整杆更换及调整、齿轮箱换油和闸瓦拆装。
(3)基础层
支撑系统开发和运行的基础,包括支撑环境及配套资源。支撑环境有PC机、MR眼镜、3Ds Max、Substance Painter、Unity3D。配套资源有转向架各结构组成对应的文字材料以及三维动画视频资源。
3.2 系统开发软件选择
(1)虚拟引擎软件
选用Unity3D平台完成系统中城轨车辆转向架在虚拟场景中实现及功能交互开发。Unity3D开发环境如图5所示。

图5 Unity3D开发环境
(2)3D建模软件
影响系统视觉效果的另外一个关键因素是系统所涉及的3D模型。由于轨道车辆虚拟设计中关于轨道车辆整体或部件模型在场景只做展示和设计所用,因此系统建模过程中选择3Ds Max建模软件,界面如图6所示。
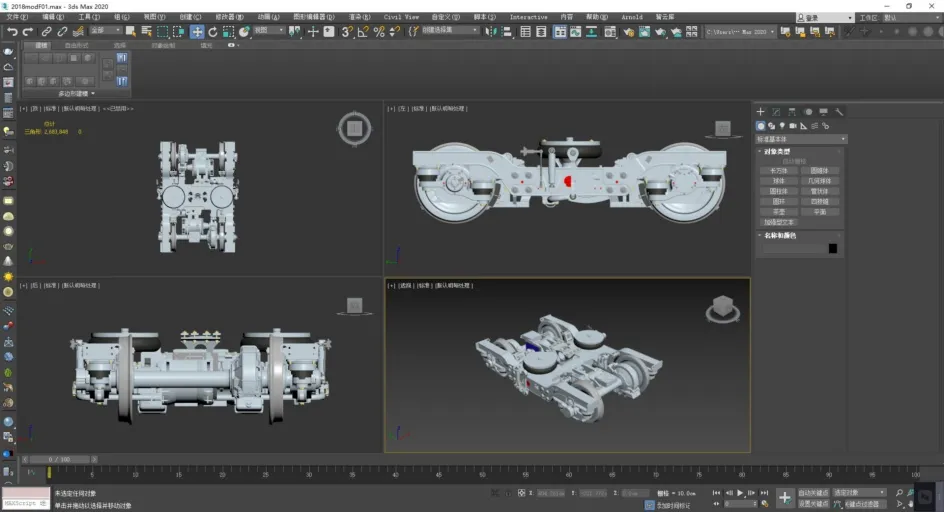
图6 3Ds MAX建模界面
(3)材质贴图绘制软件
采用Substance Painter绘制模型的PBR材质贴图,实现基于物理的渲染效果,包括基础颜色、法线、粗糙度、金属度、阴影、环境光闭塞等属性。
3.3 开发过程
系统的开发分为三个小组和多项开发任务,整体开发流程如图7所示。
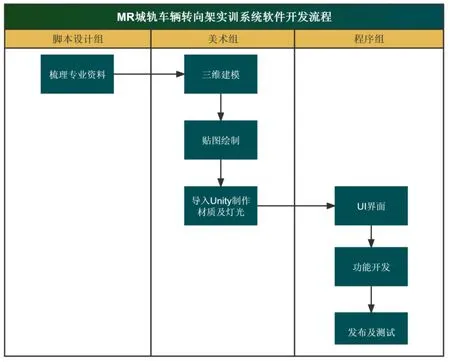
图7 开发流程图
(1)脚本设计组
梳理城轨车辆的专业资料,包括系统的介绍、技术参数、现场拍摄资料、实训任务脚本、课程视频等,提供给美术组。
(2)美术组
根据脚本设计组提供的资料,构建三维模型和贴图,采用如上所述的3Ds MAX和Substance Painter软件完成。对MR设备来说最重要的是模型的优化,在保证模型结构完整的前提下,还要尽量降低模型的面数和贴图尺寸,保证程序发布之后运行流畅。制作好模型和贴图导入Unity引擎,制作对应的材质,配合灯光,实现逼真的显示效果。渲染效果如图8所示。
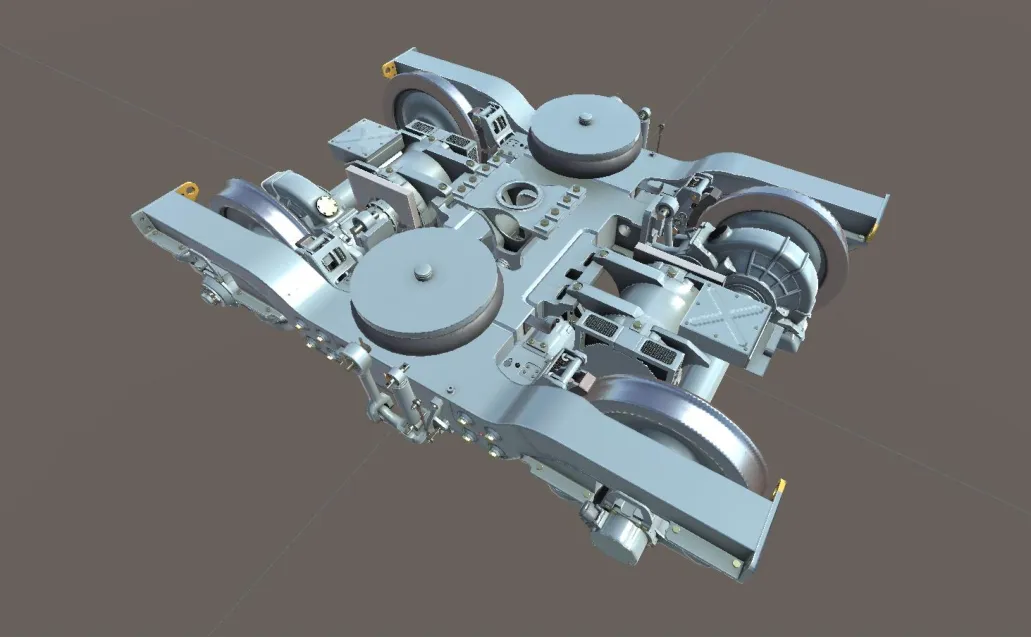
图8 渲染效果图
(3)程序组
根据系统的功能模块,在Unity3D引擎里制作UI界面,并开发相应的功能,开发语言采用C#。初步开发完成后发布在MR眼镜中测试,查看系统运行的效果和稳定性,并进行调试。如图9所示。

图9 MR眼镜中测试效果图
4 系统调试与优化
系统在初版制作完成后,经过多人次的运行测试,发现部分功能模块运行不够流畅,显示效果不够理想,分析后给出如下解决方案:
(1)优化模型面数
在保证转向架结构不变的前提下,减少各部件模型的面数和布线,最终将转向架模型面数控制在17万以内。图10是在建模软件里优化后的转向架模型。

图10 优化后转向架模型
(2)优化模型材质
在转向架的结构认知模块中,需要用到半透明材质,Unity3D中,默认的半透明材质比较消耗硬件的计算性能,将该种材质的Shader进行优化处理,减少显示的计算性能消耗。如图11所示。

图11 优化模型材质
(3)调整UI界面
MR眼镜中的显示效果和PC电脑不一样,针对MR眼镜调整UI的文字大小、按钮大小和背景颜色,提高显示效果。
5 结语
本文分析了轨道交通车辆检修教育、培训在实际过程中存在的问题,开发了基于PC端、安卓移动终端、MR智能眼镜端的三平台轨道交通车辆检修仿真系统。通过对轨道交通车辆整体的机械结构和电气特性等建立完整、精细的三维模型,从原理、操作、维护等方面构建学习、实训体系,实现知识的一体化、动态化和具有真实感的表达方式。在保证效果的前提下,极大的缩短了学习周期,节省了成本,提高了竞争力。系统具有较大的推广价值。
