一种激光雷达探测模块控制电路的设计和制作
2022-08-24冯攀张站业丁红波
冯攀,张站业,丁红波
(1 安徽新闻出版职业技术学院, 安徽 合肥 230601;2 中国科学院合肥物质科学研究院安徽光学精密机械研究所,中国科学院大气光学重点实验室,安徽 合肥 230031;3 中国科学技术大学, 安徽 合肥 230026)
0 引 言
激光雷达[1]是一种新兴的主动式现代光学遥感设备,以激光为辐射源,是激光、大气光学、雷达、光机电一体化等技术结合的产物[2]。作为激光技术和探测技术的综合应用之一,激光雷达凭借其高灵敏度、高时空分辨率、全天时探测等优势,成为探测大气物理参数的有力手段[3]。结构上,典型的激光雷达系统主要包括激光发射系统、光学接收系统和探测采集系统三部分。其中探测采集系统包含了光电转换器、采集卡和计算机。光电倍增管(PMT)以其增益效率高、响应速度快、量子效率高和噪声低等优势[4],成为大气激光雷达中应用最广泛的一种光电转换器,在微弱光信号检测方面具有重要作用。由于PMT 一般安装于激光雷达系统的箱体内,无法通过旋钮以机械方式调节其增益效果,且其增益调节目前大多需要人工依据经验手动操作,但由于人工存在自身反应延迟效应,加上系统的响应时间误差,会影响信号采集的准确性[5]。激光雷达设备内部温度变化较大,温度的变化直接影响PMT 探测器的增益,增益的变化会给激光雷达系统带来巨大的误差。故本文设计加工了PMT 控制电路板,以实现PMT 增益的自适应调节以及计算机软件智能化控制增益调节的功能。通过观察输出信号大小确定增益调整,降低/升高数模转换器(DAC)输出电压调节PMT 的控制电压以达到增益调节目的。正常工作下,PMT 需要在其阳、阴极之间加上500∼2000 V 的高压[6],常用的外接高压电源方案存在操作不便、调节精度低及占用空间大等问题[7]。随着技术演进,激光雷达需要进一步向小型化和轻量化发展[8],本文制作了一款激光雷达探测模块,集成了PMT 模块、PMT 高压电源模块及控制电路板等,相比商用PMT 大幅度提升了安全性能,很好地精简了信号采集系统[9]。
1 控制电路板的结构与参数


H10721-20 型PMT 模块的主要参数如表1 所示。电源电压输入范围在4.5∼5.5 V之间,最大输入电流为2.7 mA。值得注意的是,PMT 内部结构会因为电源电压过高而损坏,致使PMT 失效。通过弱电控制信号来调整PMT 的增益大小,电压调节范围在0.5∼1.1 V 之间。最大控制电压和最大输出电流分别是1.1 V 和100µA。H10721-20 型PMT 模块接收光信号的靶面直径为8 mm。

表1 H10721-20 型PMT 的主要参数Table 1 Main parameters of H10721-20 PMT
PMT 驱动控制系统由单片机、转换芯片、PMT 及其外围电路组成。主控单片机采用STM32F103C8T6型单片机, 其内核为ARM32 位的Cortex-M3。该单片机主频速度可达72 MHz, 具有64 Kb 的Flash 程序存储器和20 Kb 的SRAM, 拥有十分丰富的外设配置, 集低功耗、高性能、低成本等优点为一体。选用TLV5610 型号的芯片来实现数模转换,该芯片是12 位电压输出DAC,具有灵活的串行接口。编程时使用的16 位串行字符串具有4 个控制位和12 个数据位,可同时更新8 个DAC 输出。TLV5610 的基准精度大部分取决于板载的基准芯片。本系统采用REF195S 型号的基准芯片,其控制基准电压为5 V。所有具体单元及相关参数如表2 所示。

表2 PMT 控制电路板单元及其主要参数Table 2 PMT control circuit board unit and their main parameters
2 控制电路板的设计与制作
2.1 电源模块设计
由于计算机、PMT 和STM32 单片机三者的供电电压都不相同,分别为24、5、3.3 V,因此先采用24 V开关电压为计算机供电,再进行电压转换处理。图2 为电压转换模块原理设计图。分别采用K7805-500R3模块和AS1117-3.3 模块进行两次电压转换,将原始的24 V 输入电压先后转换为5 V 和3.3 V,实现由计算机到PMT 和单片机的电压转换。
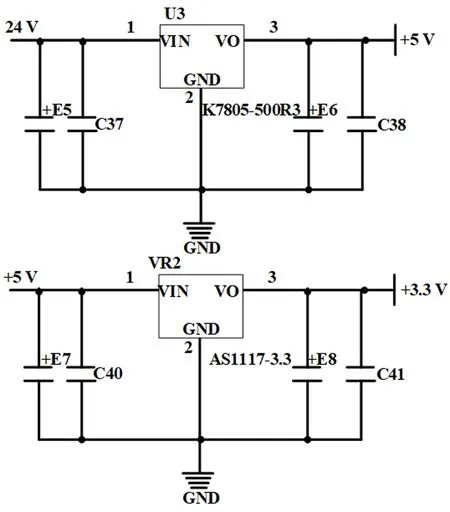
图2 电压转换模块设计Fig.2 Design of voltage conversion module
2.2 串口通信模块设计
串口通信模块主要是实现PC 机对单片机的程序下载和单片机对PC 机的数据输出,从而完成单片机与PC 机之间的通信[10]。早期的PC 机带有RS232 串口,可以直接与单片机相连。后考虑体积及实用性问题,RS232 串口被取消,所以目前都采用RS232 转USB 通信线与PC 机实现通信。RS232 上传送的数字量采用负逻辑,且与地对称,逻辑1 为−3∼−15 V,逻辑0 为+3∼+15 V。而单片机使用的电平标准为TTL 正逻辑电平,逻辑1 为+5 V,逻辑0 为0 V。因此需要使用电平转换芯片来完成从TTL 电平到RS232 电平的转换,才可以实现单片机与上位机之间的串口通信。根据单片机的供电电压3.3 V,选择常用的SP3232 芯片作为电平转换芯片。图3 为具体的串口通信电路原理,当串口正常通信时,图中的D4 灯闪烁,反之则为熄灭状态。

图3 串口通信电路设计Fig.3 Design of serial communication circuit
2.3 单片机单元电路设计
选用的单片机主控芯片STM32 的最小系统原理如图4 所示,该芯片外围电路包括晶振电路、复位电路和串行线调试(SWD)程序下载电路。晶振电路采用外接的8 MHz 时钟晶体作为高频时钟源向主控芯片提供高效准确的工作时序,且单片机内部由锁相环(PLL)完成倍频功能。采用的复位方式为NRST 引脚的低电平复位,使用按键复位电路向引脚提供低电平,完成系统复位。与传统调试方法相比,SWD 接口下载与调试程序速度快、引脚少,在高速模式下更为可靠。
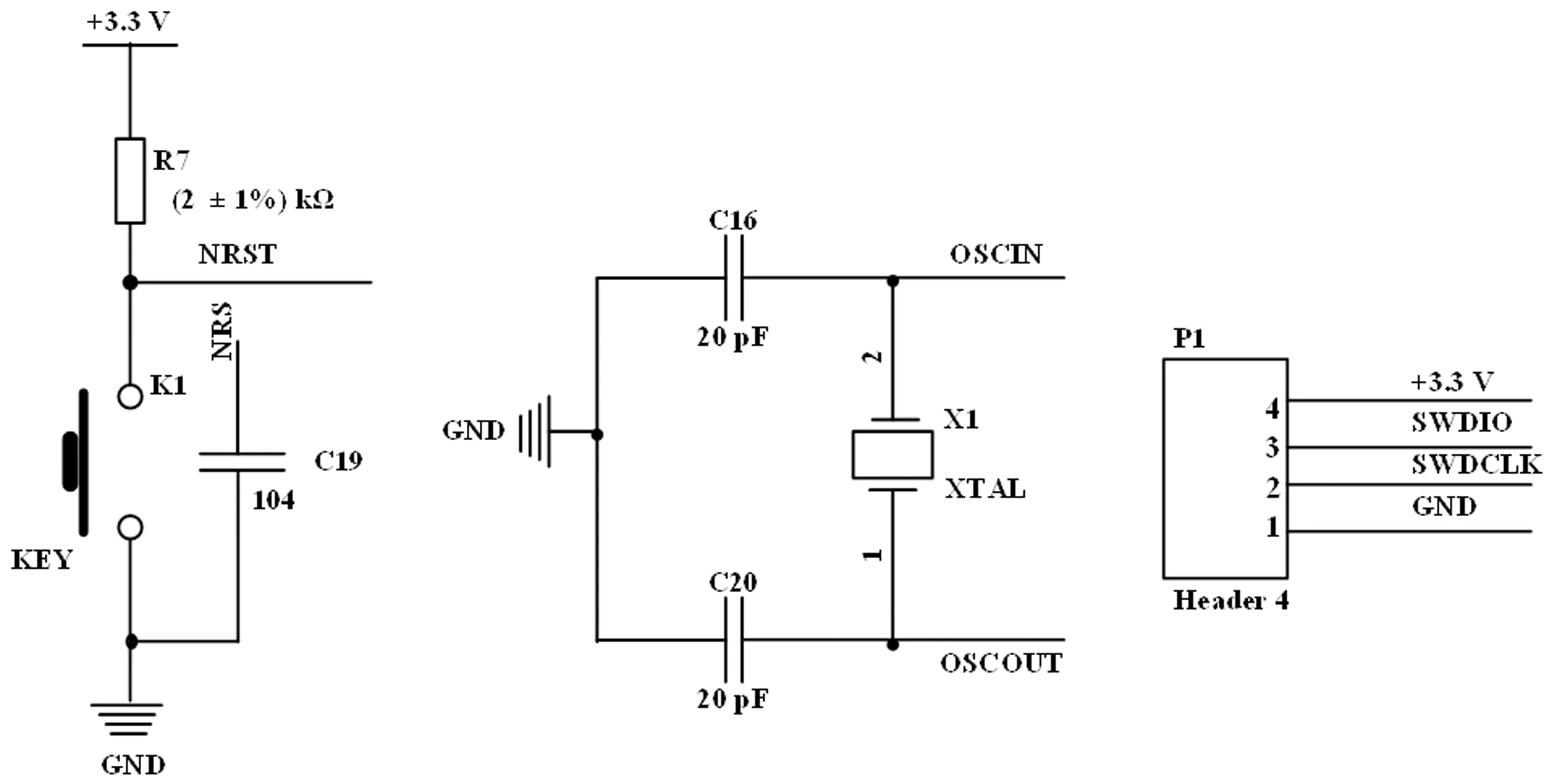
图4 单片机最小系统原理Fig.4 The principle of single-chip microcomputer minimum system
图5 为STM32 单片机功能引脚分配示意图,通过引脚与其他模块单元相连完成串口通信、SWD 程序下载、数模转换等功能。
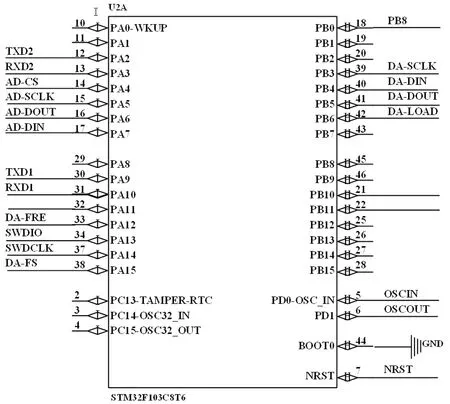
图5 单片机引脚功能分配Fig.5 Pin function distribution of single-chip microcomputer
2.4 DAC 单元电路设计
图6 为DAC 单元选用的转换芯片TLV5610 的电路原理。采用STM32 硬件IO 口模拟SPI 的方式与转换芯片进行通信。TLV5610 的FRE 引脚与PA12(参见图5)相连完成预设输入;FS 为帧同步输入端口,连接PA15;SCLK 是串行时钟输入引脚,与PB3 相连;DIN 引脚与PB4 相连,完成串行数字的输入;DOUT 连接PB5 输出串行数字;LDAC 是载入DAC 端口,与PB6 相连。

图6 DAC 芯片电路设计Fig.6 Circuit design of DAC
2.5 温度检测电路设计
图7 为PMT 温度检测单元的电路原理。采用负温度系数(NTC)作为PMT 温度检测的传感器, 使用REF3020 基准电压芯片为测温电路定电压源。NTC 与电阻R27 组成一个串联电路,当PMT 工作环境温度变化时,NTC 阻值发生相应变化,从而改变T1AD 端的电压值。T1AD 连接到单片机PB8 脚,通过单边机内部AD 转化计算后可以得到温度值。

图7 温度检测电路设计Fig.7 Circuit design of temperature measurement
2.6 印制电路板(PCB)制版
完成所有模块的电路设计之后,可从芯片公司官网获取元器件的封装,进行下一步的PCB 设计与制版。PCB 板是硬件电路的基础,其中元器件的布局和布线都会对控制板的工作性能造成影响[11]。在对PCB 进行设计时,不仅需要考虑PCB 的尺寸、线路布局是否合理,各元器件的连接是否正确,还要尽量避免实际使用中的电磁干扰问题。首先,PCB 的尺寸太大会导致走线冗余,增加阻抗,不仅会降低抗噪能力,还会增加成本;而尺寸太小会影响散热,导致邻近布线相互干扰。综合考虑设计要求,PCB 尺寸定为110 mm×60 mm。其次,应根据模块的功能性对特殊原件的摆放进行布局,例如单片机应当位于PCB 板的正中,而外围则可以放置按钮和拨动开关等可调元器件。对于像晶振源这样的高频元器件,摆放时需要尽可能地靠近主控芯片,从而缩短连线,减小电磁干扰;相反易受干扰的元器件则应尽量相互远离来避免电磁干扰。最后,PCB 布线主要是针对电源线的设计,考虑到环路电阻的影响,电源线的粗度需要达到标准,且电源线、地线和信号线的走向应当一致。图8 展示了设计的PCB 控制电路板,其中,图8(a)、(b)为PCB 设计图的正反面,图8(c)为3D 效果图,图8(d)为实际制作出的PCB 板。

图8 PCB 设计图与PMT 电路板实物图。(a)正面;(b)背面;(c)3D 图;(d)实物图Fig.8 PCB design diagram and the picture of PMT circuit board. (a)The front side;(b)the back side;(c)3D drawing;(d)physical drawing
2.7 总体工作流程
PMT 控制电路板的工作流程如图9 所示。开关电源提供给系统原始的24 V 工作电压,经直流转换芯片完成24 V-5 V-3.3 V 的电压变换,实现从PC 机到探测器PMT 再到STM32 的电源供给。作为系统的核心控制单元,主控芯片STM32 使用RS232 与上位机进行串口通信,完成控制电压设置与电压回传;使用SPI 协议与DAC 芯片进行通信,传递PC 机指令。基准源芯片TLV5610 为DAC 提供了基准电压,完成电压转换指令。最后DAC 输出控制电压来调整PMT 的增益效果。当PMT 的初始增益设定后,主控芯片STM32 不断检测PMT 工作环境温度,当温度变化后,通过调节DAC 芯片的输出控制高压电源以适应温度变化。

图9 PMT 控制电路板工作流程图Fig.9 Workflow chart of the PMT control circuit board
3 实验与结果
3.1 PMT 高压控制稳定性
为了检验PMT 控制电路板对高压输出控制的稳定性,将PMT 控制电路板用于实际测量实验的米散射激光雷达中,并对PMT 的电压输出进行了实时采样测试。电压设置为587.5 V,采样点数200 个(1 min 记录2 个数据点),结果如图10 所示。可以看出,其电压值控制在587.2∼587.9 V 之间,平均值为(587.5±0.1)V。该测试实验验证了设计的PMT 控制电路板对高压控制输出的稳定性。
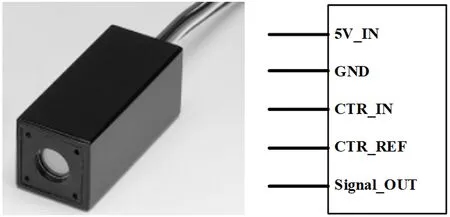
图1 H10721-20 型光电倍增管实物图(a)与原理图(b)Fig.1 The physical diagram(a)and the schematic diagram(b)of H10721-20 photomultiplier tube

图10 PMT 电压控制稳定性试验Fig.10 Stability test of PMT voltage control
同时测试了不同环境温度下探测器高压值的变化。将相同型号规格的两个PMT 放置于高低温箱中,其中一个使用电位器调节(在本实验中,PMT 高压实际无法通过这种方式进行调节,原始的设定高压值保持不变),另一个使用设计的控制板,分别采集了两种PMT 的实际检测高压值以及PMT 探测器Signal OUT 的引脚信号值。实验温度范围为10∼40◦C,每个温度测试5 min,每15 s 记录一组数据,其结果如图11 所示。图11(a)为PMT 探测器信号输出,图中显示设计的控制板驱动的PMT 信号输出基本稳定,这说明增益是稳定的,而电位器调节方式的信号输出波动幅度大,且随温度升高逐渐减小。从图11(b)可以看出,使用电位器调节的PMT 实测高压值会随着温度的升高不断减小,而使用设计的控制板的PMT 高压则会逐渐线性增大。这是因为温度的变化导致电位器阻值发生变化,温度升高,相应的高压值变小,为补偿温度变化带来的影响,设计的控制板将自动调节升高高压值。
3.2 PMT 控制电路板可靠性
采用配置了PMT 控制电路板的米散射激光雷达进行探测实验,以进一步验证该电路板在激光雷达实际探测应用中的可行性。米散射激光雷达进行大气垂直探测,记录其时间序列的探测原始信号和对应的PMT高压值,如图12 所示。由图可知,激光雷达的探测信号相对稳定,大气气溶胶边界层结构以及大气的空间分布细微结构都能很好地展现,为进一步的数据反演提供了良好的基础数据;同时,对应的PMT 高压值也非常稳定。该实验成功验证了研制的PMT 控制电路板的可靠性,可用于激光雷达对中低层大气的探测。

图12 PMT 控制电路板可靠性实验。(a)激光雷达信号;(b)PMT 高压值Fig.12 Reliability experiment of PMT control circuit board. (a)Lidar signal;(b)voltage of PMT
3.3 PMT 高压远程控制
PMT 探测高压调节功能集成在激光雷达采集控制软件上进行汇总,首先设置控制板端口与通信波特率,然后建立串口连接。通过向控制板下位机发送查询指令,STM32 单片机返回当前设定高压值与实时检测高压值;通过设置命令发送高压设定值,STM32 单片机控制DAC 输出对应控制高压值;通过对激光雷达信号的分析可以自动调节PMT 探测器高压。
4 结 论
基于激光雷达探测要求和PMT 的设计需求,完成了PMT 控制电路板的设计和制作。采用内置高压电源的H10721-20 型PMT 实现信息采集系统的结构简化;联合DAC 和单片机完成与PC 机的通信,传递电压设置和回传指令,实现计算机对PMT 增益调节的控制;使用NTC 作为温度传感器,设计温度检测电路,根据温度变化自适应调节高压,实现稳定的PMT 增益控制。最后通过稳定性对比实验和探测实验验证了PMT控制电路板在实际激光雷达探测中的良好性能,可稳定可靠地调节增益并输出信号。
