高分辨率变焦式连续波测风激光雷达设计与实验
2022-08-24崔桐陈相成戴光耀张洪玮王琪超吴松华
崔桐,陈相成,戴光耀,张洪玮,王琪超,吴松华,2∗
(1 中国海洋大学海洋高等研究院信息科学与工程学院,海洋遥感研究所, 山东 青岛 266100;2 青岛海洋科学与技术试点国家实验室,区域海洋动力学与数值模拟功能实验室, 山东 青岛 266237 )
0 引 言
风场是在大气循环、物质输送过程中,对水分、气溶胶等微型颗粒进行运输循环的主要动力,也是各种尺度天气现象的主要动力,在很大程度上影响着人类的生存及各类活动[1]。快速、准确、全面的风场测量,在风能开发与风电场资源选址优化[2]、保障航空航行安全[3]、观测分析各类天气现象、认知地球环境变化等领域具有重要的意义。
风场测量的主要方式有固定式测风塔、探空气球、微波风廓线仪、测风激光雷达等。固定式测风塔对选址、空间、工程设计等方面有较高的要求且成本较高,测量高度有限且无法更改观测位置;探空气球对其施放环境有一定要求且成本较高,施放频率受天气条件及成本约束,风场数据的获取频率低;微波风廓线仪则受天气影响较大,晴朗天空以及低空的探测能力较弱。激光雷达具有非接触测量、不影响目标状态、时空分辨率与测量精度高、量程较大等优点,是主动式遥感的一种应用形式[4]。其中应用相干多普勒测量原理的测风激光雷达能够实现一定区域内风场的非接触式测量,可应用于区域风场观测,风电厂风机尾流的观测分析[5],海面风场[6]、水汽通量[7]、湍流[8]等多种海洋-大气边界层动力学参数的探测,气象信息观测预警,气候与环境变化分析等诸多领域,且有着广阔的发展前景。
自1970 年第一台基于10.6µm CO2激光器相干连续测风激光雷达研制至今[9],多普勒激光雷达技术得到了高速的发展。根据激光发射特征可分为连续波相干测风激光雷达与脉冲相干测风激光雷达。其中脉冲测风激光雷达有效测量区间通常为30 米至几千米,存在较近距离的测量盲区,无法满足全区域风场的测量需求;连续波相干测风激光雷达则是探测光束聚焦位置的风速数据,而且由于激光光束聚焦的物理特性,理论上能够实现从1 米至数百米位置区间内的测量,因此能够与脉冲测风激光雷达实现互补式探测,覆盖全区域风场。连续波测风激光雷达在国外起步较早,随着光纤通信技术的迅速发展,光纤激光器及其配套器件被广泛应用在连续波相干测风激光雷达中。2000 年Karlsson 等[10]首次发布基于1.5 波长光纤激光器的全光纤连续波相干测风激光雷达。2004 年,英国QinetiQ 公司研发了商业化的全光纤连续波相干测风激光雷达ZephIR,能够实现10∼200 m 区间内自定义10 个位置点进行测量,测量精度为0.1 m·s−1,ZephIR 连续相干激光雷达在风资源评估、风电场规划等风能领域都有着显著的发挥[11]。2014 年,丹麦的Windar Photonics 公司研发的WindVISION 测风雷达通过发射聚焦在40∼100 m 内某点且有一定角度的四束连续波激光光束测量风机的尾流、阵风、湍流等数据,为风电领域系统的优化提供了数据保障。目前国内开展连续波测风激光雷达系统研究的单位较少。四川大学王建银等[12]在2007 年使用全光纤结构搭建测风激光雷达系统,对连续波测风激光雷达的探测性能进行了研究。西南技术物理研究所冯力天等[13]使用全光纤测风雷达系统将光束聚焦至55 m 与100 m 并结合VAD 扫描算法与测风塔上的超声波风速计进行对比实验,对扫描模式的适用性进行了研究。中国科学技术大学蒋杉等[14]、中国海洋大学王希涛[15]、中科院安徽光机所安晏阳等[16]也开展了连续波激光相干测速领域相关的研究工作。
近地面风场受地形、植被、建筑物及人类活动等影响,变化剧烈且无规律。近地面风速及风向会影响气溶胶粒子的生成、输送和沉降[17],而气溶胶浓度直接反映当地空气质量状况,对公众健康状况有较大影响[18]。近地面及近建筑物风场风速的测量对探究地表粘滞作用、分析建筑物风荷载影响以及研究边界层风场结构变化有重要的应用意义[19]。
本文设计并搭建了高精度高分辨率的变焦式连续波相干测风激光雷达系统,对连续波激光光束聚焦位置的改变进行理论分析,结合直线运动模组调整变焦镜筒改变测量位置实现变焦过程;通过设计“有效频谱质心”算法对数据进行处理分析,并优化系统本振光功率参数以提高系统信噪比;与超声波风速传感器进行对比实验,对近场风场进行长时间测量,验证该系统风速测量的精度,在此基础上对该系统在不同场景的应用进行了探究。
1 基本原理
1.1 风速测量原理
相干测风激光雷达向目标区域发射激光光束,经望远镜接收测量区间内大气中气溶胶粒子的后向散射回波信号,由于运动的气溶胶粒子会产生激光多普勒效应,因此后向散射信号光中包含其运动信息的多普勒频移,接收到的信号光与本振光混频后输入至平衡探测器,从而获得气溶胶粒子运动速度的多普勒频移信息∆f,激光雷达系统探测的回波信号为水平风速投影在激光光束方向上的速度分量vlos,即径向风速。多普勒频移∆f与径向风速vlos之间的关系为

式中λ 为激光光束波长。测量过程中,大气运动方向与激光发射方向相对时vlos为正值,相同时vlos为负值。激光雷达系统中通常会加入光学扫描模块,并结合多波束扫描方式(DBS)[20]、拟合风廓线(VAD)[21]等反演算法获取风场数据。
1.2 光学变焦原理
与脉冲相干测风激光雷达划分距离库[22]相比,连续波相干测风激光雷达是将连续激光聚焦至风场不同位置进行测量,理论上不会存在近场测量盲区。连续波激光本质上是高斯光束,在横截面上光束强度近似为高斯分布,其光强I(r)的表达式为

式中I0中心点光强,r为横截面上某点至中心距离,ωR为束腰半径。激光器从光纤出射的激光经薄透镜聚焦后仍为高斯光束,存在光斑直径最小位置即光束束腰位置(图1)。

图1 连续波激光聚焦示意图Fig.1 Schematic diagram of continuous wave laser focusing
变焦过程是通过调整变焦光学系统中光纤端面与透镜之间的距离c(简称端面距)而改变光束聚焦位置R,聚焦位置R就是高斯光束的束腰位置,束腰半径为ωR;在聚焦位置会存在以束腰中心呈对称分布的测量区间lR(即测量分辨率,在此区间内气溶胶后向散射信号光会被系统接收探测),可用瑞利长度ZR表示,其与望远镜的入射孔径D、聚焦位置R之间的关系为

激光雷达系统的望远镜部分选用单透镜聚焦,为提高接收光耦合效率校正像差,选用非球面平凸透镜。透镜焦距的增加会降低变焦精度要求,但是会增加变焦时镜筒活动区间,在平衡空间、精度、成本等因素后选用焦距为300 mm 的非球面平凸透镜。聚焦位置R与端面距c、测量区间lR存在如图2 所示的关系。

图2 聚焦位置R 与端面距c、测量区间lR 的相关曲线Fig.2 Correlation curve of focus position R and distance c between fiber end and lens and measurement interval lR
连续波测风激光雷达的测量区间lR会随聚焦位置的增加而增大。在小尺度风场内,端面距c、测量区间lR与测量位置R之间的对应关系如表1 所示,相关系统参数为:变焦精度为1 m,径向测量距离为2∼30 m,测量分辨率小于1 m。径向风速测量区间为0∼18 m·s−1,风速测量精度0.01 m·s−1。对近地面复杂风场的探测有较好的空间分辨力,能够满足海气边界层结构风场的高精度探测要求。

表1 聚焦位置R、端面距c、测量区间lR 对应值Table 1 Corresponding values of focus position R and distance c between fiber end and lens and measurement interval lR
由于高斯光束聚焦的物理性质,在较远距离能量束腰扩大且能量分散,无法满足能量探测要求,因此连续波测风最大距离只有几百米左右。由于测量区间lR内大部分的风速信号都会被系统所探测,因此系统所采集的风速数据中存在多个有效的速度分量,这对连续波测风的数据处理增加了难度。
2 系统设计
2.1 激光雷达系统组成
连续波相干测风激光雷达系统主要由种子激光器、激光放大器、光纤分束器、光纤环形器、变焦光学模块、光功率衰减器、光纤耦合器、平衡探测器、采集板卡、工控机等模块组成。其结构如图3 所示。

图3 变焦式连续波测风激光雷达系统结构图Fig.3 Structure diagram of varifocal CW-wind lidar system
1550 nm 波长种子激光器输出小功率激光至激光放大器,再由其放大至1 W 功率输出,放大器输出端连接光纤分束器,功率较小的经光功率衰减器调至合适功率作为本振光,功率较大的通过环形器输入至收发一体的变焦光学模块并聚焦至测量位置,经望远镜接收到的信号光与本振光在2×2 光纤耦合器内进行拍频差分,作为正负两路接入平衡探测器,数据采集板卡将平衡探测器输出的混频信号进行A/D 转换后做快速傅里叶变换,工控机存储的数据则是包含有速度信息的频谱数据,可进行后续的数据处理反演。
变焦式连续波相干测风激光雷达系统整体如图4 所示,系统各模块相关参数如表2 所示。
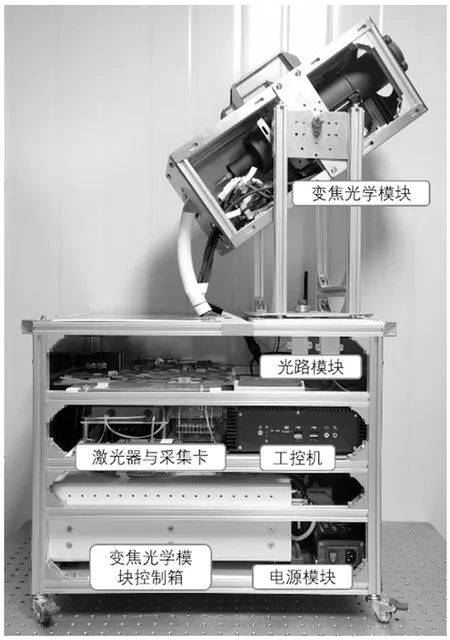
图4 变焦式连续波测风激光雷达系统Fig.4 Varifocal CW-wind lidar system
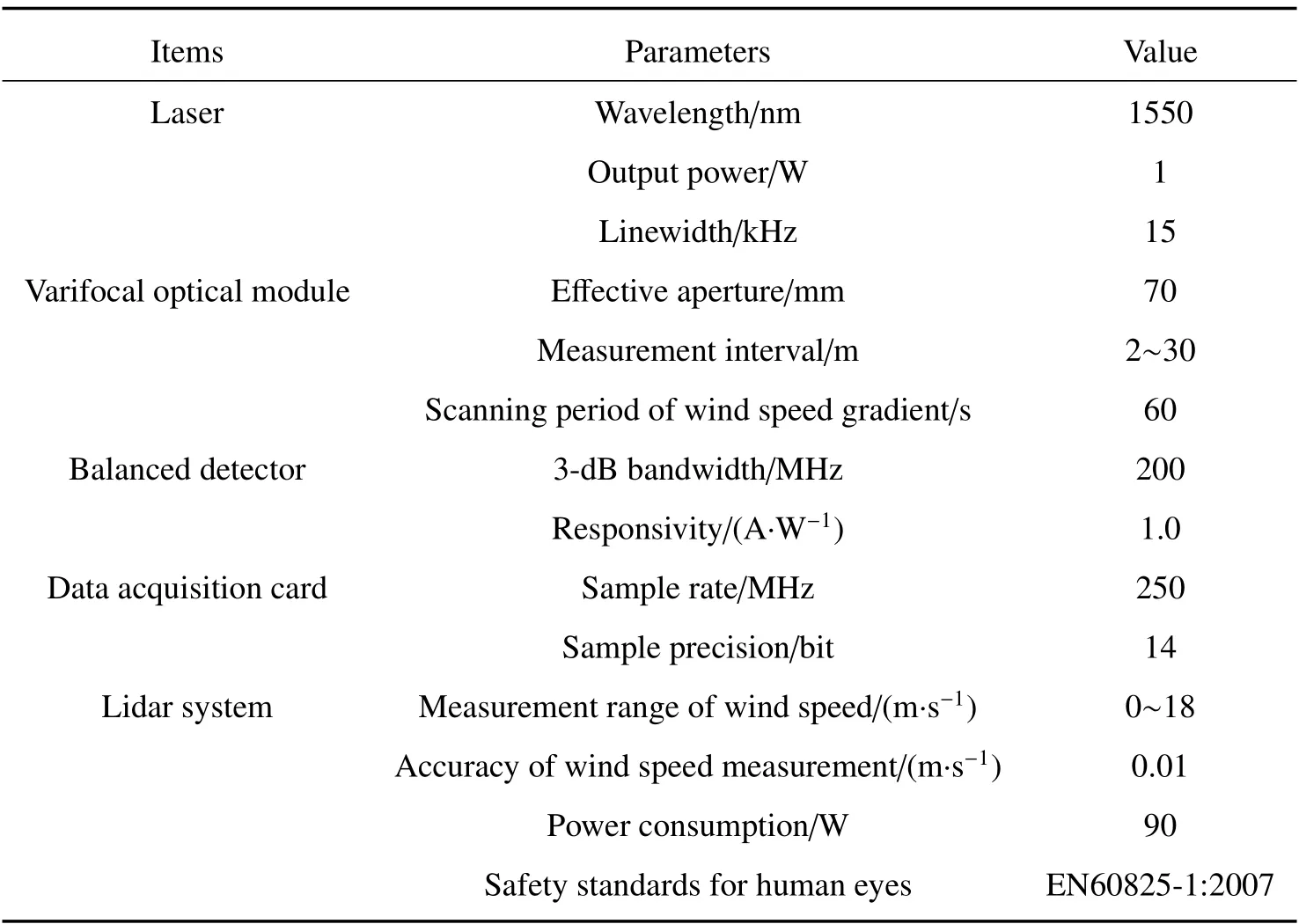
表2 变焦式连续波测风激光雷达系统相关参数Table 2 Key parameters of varifocal CW-wind lidar
2.2 本振光功率优化选用
在相干探测中,本振光与激光雷达系统接收到的后向散射信号进行光拍频,再经平衡探测器进行光电转换,由此可获得气溶胶运动速度的多普勒频移信息。由于气溶胶颗粒的后向散射信号属于弱信号,在系统探测的过程中,本振光主要起到对信号光的放大作用,对数据的信噪比有较大影响[23]。
采集到的数据中,噪声主要是由本振光引起的散粒噪声(SN)与相对强度噪声(RIN)。其中由本振光引起的散粒噪声电流isn为
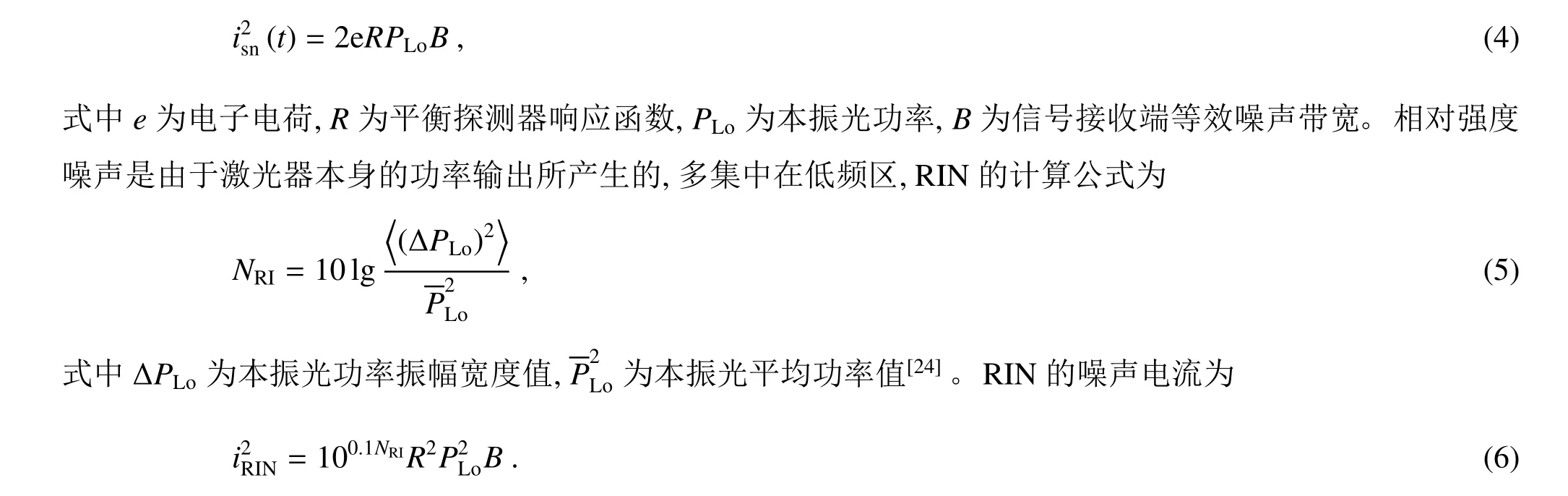
在激光雷达系统中,采集板卡、平衡探测器等器件的热噪声要远小于本振光所引起的SN 及RIN。相干激光雷达本振光及信号光在2×2 耦合器中混频并被分成能量相同相位相差180◦的两束光接入平衡探测器,两路响应电流在平衡探测器中做差后可压制SN 及RIN,从而提高数据信噪比。本振光功率的增加会提高响应电流,但由于信号光功率远小于本振光功率,且探测器存在饱和效应,在提高到一定功率后会压低对信号光的响应度,因此在基于相干探测原理的激光雷达系统设计中本振光功率的设定对系统探测能力、数据信噪比有直接影响。
为测试不同本振光功率对信噪比的影响,调整雷达系统使光束聚焦在固定转速的硬靶上,调整光功率衰减器使本振光功率在100∼2000µW 递增,测量转速及本底噪声,计算并取每组有效数据的信噪比最大值,多次采样所得的信噪比最大值的平均值作为当前本振光功率时测量硬靶速度的信噪比。
由图5 中本振光功率与信噪比相关曲线可知,在200∼400µW 时有明显的上升下降趋势,且在330µW附近存在峰值,考虑到激光器输出功率有较大波动,在系统当前状态下选择330µW 作为本振光功率,系统采集到的数据会有较高的信噪比。
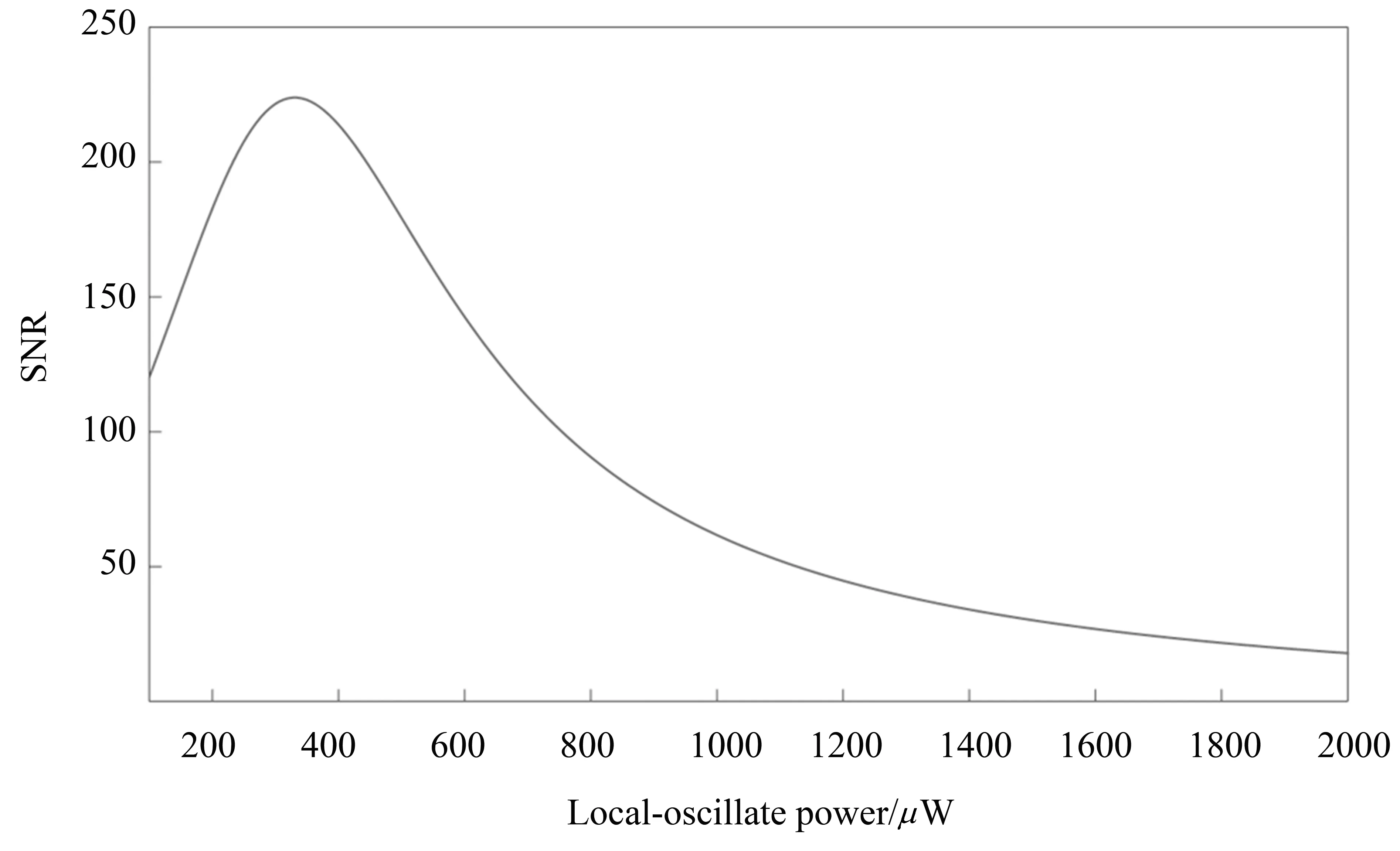
图5 本振光功率与信噪比相关曲线Fig.5 Correlation curve between local-oscillate power and SNR
激光雷达系统所选用平衡探测器在输入波长为1550 nm 光时,其饱和光功率为120µW,图5 中所示本振光功率为输入至2×2 耦合器时光功率值,考虑到光纤器件、探测器等对光有所衰减,实验所测得本振光功率与信噪比曲线符合其理论数值。当前系统状态为连续波激光波长1550 nm,输出功率1 W,根据实验结果,选用的330µW 本振光功率适用于此状态下连续波相干激光雷达系统。
2.3 数据反演算法
气溶胶颗粒的后向散射信号属于弱信号,为提高系统的弱信号探测能力及数据的可分辨性,快速傅里叶变换(FFT)后的频谱数据会通过设置累加次数提高数据信噪比。由于测量区间的存在,采集到的数据可能存在多个有效速度分量。在频谱质心算法基础上,为提高测量数据的准确性,需要保留有效信号的速度分量值,因此需要进行数据的筛选并保留当前系统状态下的有效速度并做加权处理,故而优化并设计了计算有效数据的方法—“有效频谱质心算法”,该种算法的表达式为

式中fv为有效风速数据的频率,f1、f2为数据中有效频率的上下限,fi为有效频率,Sfi为有效频率值对应的信噪比。
“有效频谱质心算法”的算法流程图如图6 所示,数据处理分为两个部分: 本底噪声数据处理与风速数据处理。在本底噪声数据处理阶段,系统每隔2 h 会自动存储30 s 的噪声数据,多组噪声数据做平均处理后即为系统当前状态下的本底噪声。在测风激光雷达数据信噪比Slidar的定义中,信号强度为原始数据Doriginal减去本底噪声DBN后的值,噪声值Ncurrent为频谱峰值后100 个点的均方根值,两者的比值则为当前频谱数据各频率点的信噪比值,计算公式为

图6 算法流程图Fig.6 Flow chart of algorithm

有效频谱质心算法需要确定系统当前状态有效数据筛选阈值Sn,进而筛选频谱数组中的有效值。系统噪声是随机的,需要取多组噪声数据再减去平均本底噪声,并应用信噪比的计算方式,计算每组噪声的信噪比最大值Smax,多组最大值取平均值后的Sn即可作为有效数据筛选的阈值。
在风速数据处理阶段,首先将系统采集的风速原始数据减去系统本底噪声,再提取频谱中幅值最大点对应的频率值。当前系统由于测量区间的存在,会在强度最大值点有一定频率的展宽,因此需选取展宽外100个点计算当前频谱数据噪声值,将除去本底噪声后的数据与当前频谱数据噪声值相比,即可得到当前频谱数据中各频率点对应的信噪比值Slidar。筛选后的有效数据应用式7 进行加权计算即为当前频谱数据中有效值。风速频谱数据的信噪比阈值、筛选后的有效频率值区域及处理后有效值点如图7 所示。经过筛选后,频谱中大部分无效数据被剔除,可显著提高数据反演精度及效率。
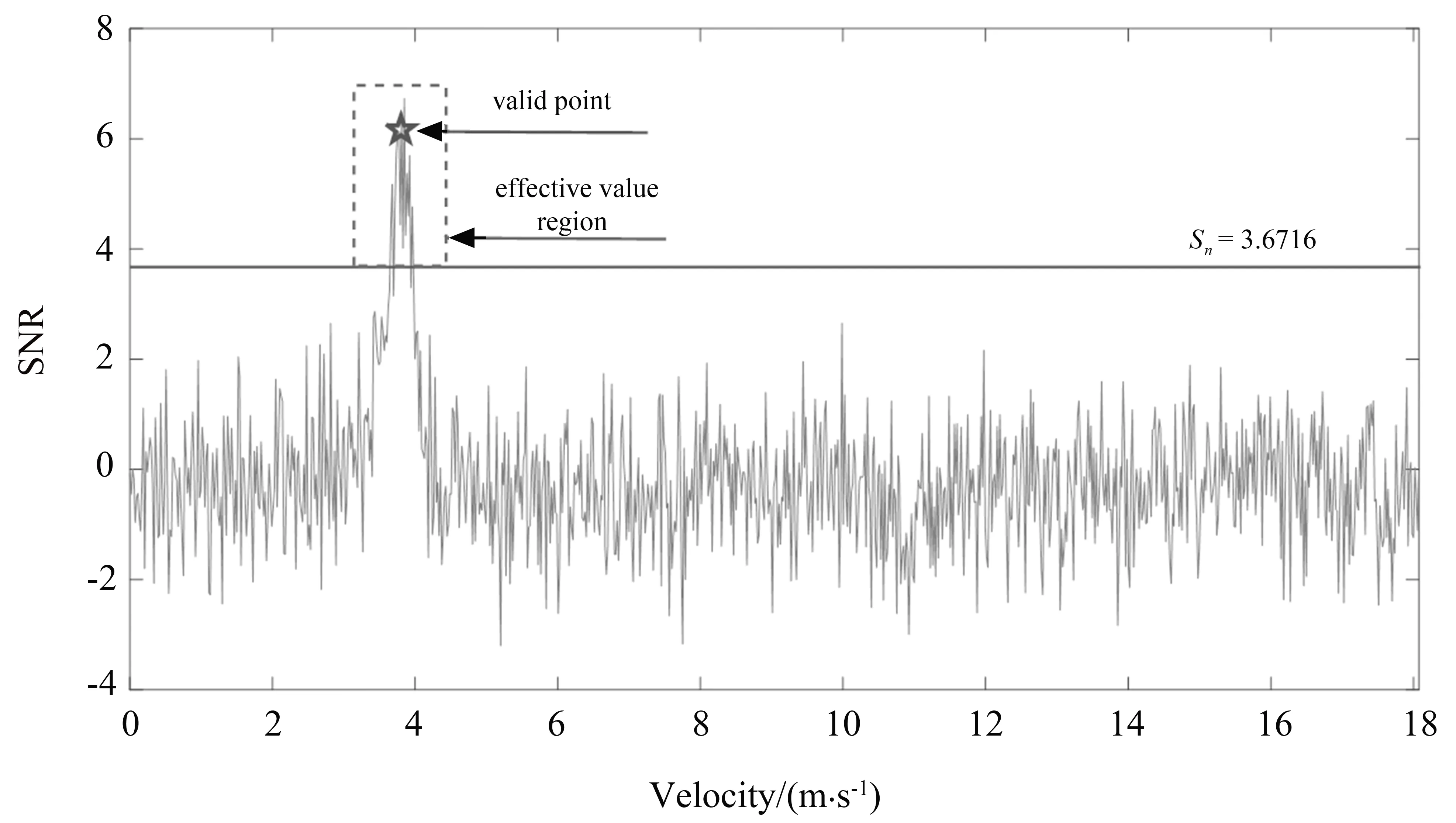
图7 当前频谱数据中信噪比阈值、有效值区域及速度有效值点Fig.7 SNR threshold,effective data region and velocity valid point in current spectrum data
3 系统测风对比实验
2021 年1 月激光雷达系统在中国海洋大学进行了长期的风速测量对比实验。为满足设备高分辨率高精度的测量需求,选用的对比设备为超声波风速计,其风速测量区间为0.1∼60 m·s−1,精度为2%。搭载超声波风速计的微型气象站固定于中国海洋大学激光雷达方舱实验室(36◦9′34′′N,120◦29′30′′E)上方5 m 高度处,因此需要调整雷达位置以及光束倾角,系统将测量位置调整至14 m,倾角32◦,方位角东南165◦,系统实验环境如图8 所示。

图8 实验环境Fig.8 Experimental environment
微型气象站每隔3 min 上报一次瞬时风速数据,为保障数据对比结果,需要长时间进行测量以保证数据质量。选取2021 年1 月14 日与1 月28 日的雷达实测数据与气象站数据进行对比,时间段为09:20–15:30,需将超声波风速计的数据与连续波激光雷达实测径向风速数据进行统一。超声波风速计的数据统一方位角后计算激光光束倾角方向的速度分量,与雷达实测的径向风速值进行比较,结果如图9(a)所示。图9(b)为二者相关性分析,数据点N为215,径向风速测量区间在0.3∼5 m·s−1,测量精度0.01 m·s−1,相关系数R2为0.98,标准差SD 为0.16 m·s−1,表明二者有较好的相关性。
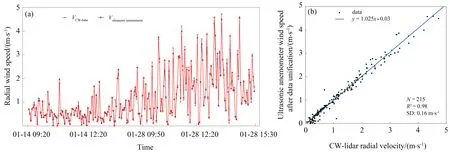
图9 连续波测风激光雷达与超声波风速计数据对比。(a)数据对比;(b)数据相关性Fig.9 Comparison of CW-wind lidar data and ultrasonic anemometer data. (a)The comparison of data;(b)the correlation of data
4 局地风速观测实验
4.1 不同天气风速观测
为进一步测试变焦式连续波测风激光雷达系统的风场测量性能,首先选取不同天气情况以及白天、夜晚进行风速测试,地点位于中国海洋大学内(36◦9′36′′N,120◦29′30′′E),光束倾角45◦,实验环境如图10 所示。图中分别对应的时间及天气状况为:1)2020 年12 月25 日14:00–17:00,晴天,风力等级2 级,温度6◦C,相对湿度35%;2)2020 年12 月27 日19:00–21:00,雾霾,风力等级1 级,温度1◦C,相对湿度100%;3)2020年12 月29 日16:00,雪,风力等级6∼7 级,温度−7◦C,相对湿度83%。

图10 不同天气情况的实验环境。(a)晴天;(b)雾霾天;(c)雪天Fig.10 Experimental environment in different weather conditions. (a)Clear day;(b)haze day;(c)snowy day
实验过程中调整光束聚焦位置,测试系统在不同测量环境时数据质量。测风激光雷达的探测原理是测量大气中气溶胶颗粒的运动速度,因此大气中气溶胶含量对系统测量性能有直接的影响。近地面由于天气变化、人类活动、植被、建筑物等复杂因素的作用,气溶胶含量不均匀且变化起伏较大。空气湿度增加会使气溶胶粒子吸收水分增大[25],但是降雨和降雪会显著减少大气中气溶胶含量,风速风向的变化也会影响气溶胶含量[26],这些变化的影响在雷达的实测数据中也有相应的体现。
图11 为系统测量的对应晴天、雾霾、雪天三种天气条件的基于激光雷达系统实测径向风速数据反演的不同高度处大气水平风速值。由图可知,雾霾天气气溶胶含量较高,测量时间段内有效数据占比99.89%,数据质量较高,同时也能看出风速变化剧烈程度与高度成反比;晴天天气湿度较小,测量时间段内有效数据占比84.75%,数据质量较好;雪天天气由于低温降雪等致空气中气溶胶含量较少,测量时间内有效数据占比41.94%,数据质量一般,且因为寒潮大幅降温等原因,风场变化非常剧烈。
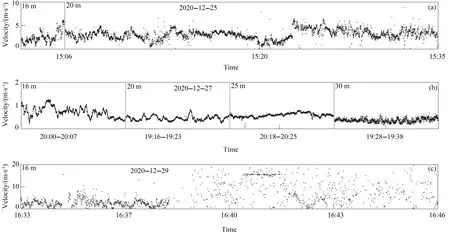
图11 不同天气不同测量位置水平风速值。(a)晴天;(b)雾霾天;(c)雪天Fig.11 Wind speed at different measuring locations in different weather. (a)Clear day;(b)haze day;(c)snowy day
通过比较不同天气近地面风场测量情况,发现激光雷达系统数据质量受气溶胶含量影响较大,且近地面风场与较高位置相比变化剧烈且无规律。应用激光雷达系统进行近地面风场的高精度测量,对分析近地面气溶胶含量、复杂地形对风场作用变化等有着重要的意义。
4.2 近建筑物风场风速观测
变焦式连续波测风激光雷达所搭载的变焦光学模块通过软件控制能够实现聚焦位置的连续变化,本系统设置为1 min 完成一次测量位置的逐点扫描过程。为提高系统采集数据信噪比,将雷达放置在中国海洋大学信息科学与工程学院南楼较高楼层(36◦9′34′′N,120◦29′30′′E),设置测量区间在5∼30 m,实验条件为:2021 年3 月15 日,雨,温度10◦C,相对湿度100%,望远镜倾角45◦,实验环境如图12 所示。

图12 实验环境Fig.12 Experimental environment
选取09:30–11:30 时间段进行测量实验,该时间段内大气中气溶胶含量较高,系统数据信噪比较高,能够较好地实现观测过程。图13 及图14 为系统连续采集的目标区域部分径向风速数据。分析图13 及图14 的实验观测数据可知,在较近的5 m 及8 m 观测位置处风速较小,较远位置风速较大,此种观测现象受到激光雷达系统放置位置所影响。从图12 实验地点可知,较近距离受到建筑物的遮挡作用,会在一定程度上影响大气运动,因此近距离实测风速较小,而较远距离处受到的遮挡作用较小,实测风速较大。图14 中能明显看出风速在时间轴上显著的变化过程,符合近地面风场的阵风特性。
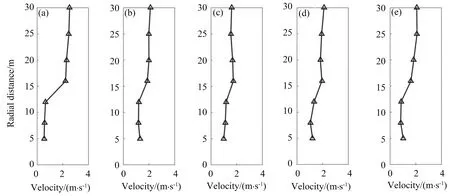
图13 径向风速梯度曲线。(a)10:01;(b)10:02;(c)10:03;(d)10:04;(e)10:05Fig.13 The curve of radial wind speed gradient. (a)10:01;(b)10:02;(c)10:03;(d)10:04;(e)10:05

图14 径向风速梯度观测数据Fig.14 The observation data of radial wind speed gradient
4.3 近地面风场风速观测
激光雷达系统能够实现较小尺度内高分辨率风速测量, 结合扫描模块可进行固定仰角的风速扫描测量,因此可实现近地面风场风速扫描观测。实验时间及环境为:2021 年3 月25 日10:50–11:05,天气晴,湿度35%;观测地点选择图10 所示位置,设置光束仰角45◦,光束扫描区域范围为60◦,选取光束径向方向2∼20 m内10 个测量点位,系统调整至每个测量点位后5 s 内完成一次扫描测量,3 min 完成一组区域扫描测量。为验证地表、植被、建筑物等的摩擦效应对近地面风速的影响,需要计算各测量点水平风速。由于每组测量时间较短,且距离较近,可认为测量区域内主风向不变,因此可使用当前状态风向数据对扫描区域内各方位角方向的风速进行校正,且由于连续波变焦过程存在一定时间延迟,需要进行多组测量后对数据做平均处理。校正后数据如图15 所示。由图可知,在主风向方向风速较大,其余方向对应方位角的水平风速较小,符合近地面风场实际情况,同时可知距地面较近位置风速小于较高处风速,能够较好地表现风速受地面、植被、建筑物等摩擦效应的影响。由此可见,变焦式连续波测风激光雷达系统能够较好地进行近地面风场内风速的观测工作。
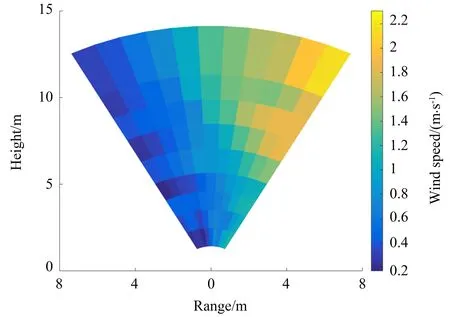
图15 扫描区域内风速数据Fig.15 Wind speed data in the scanning area
5 结 论
搭建的高分辨率变焦式连续波测风激光雷达系统能够实现2∼30 m 测量范围内测量位置的连续变化,风速测量区间为0∼18 m·s−1,且风速测量精度可达0.01 m·s−1,空间分辨率小于1 m,具有小型化、高精度、高分辨率的特点,通过优化系统参数及反演算法提高数据质量可实现不同测量位置的扫描观测过程。
激光雷达系统在中国海洋大学崂山校区进行了长期的风速测量实验: 对比超声波风速计验证了系统风速测量准确性;验证了天气状况对系统观测性能有直接影响,风速数据能够明显反映出近地面风场在雨雪天等强对流天气时较为剧烈的变化;对近建筑物风场进行持续的风速梯度扫描测量,能够明显观测到建筑物对大气运动的阻碍作用以及不同位置风速在时间轴的变化情况;结合扫描模块对近地面不同方位角度的风速进行测量,发现受地面摩擦等效应的影响主风向方向风速随高度增加而增大。
本研究所述激光雷达系统设计及实验可作为相关应用拓展的基础研究工作:海表面至海面以上十几米的海气边界层处存在剧烈的动量通量交换过程,系统可作为高效的观测手段对近海表面风场进行持续观测,可结合漂浮式激光雷达实现海面以上风场的观测;由于连续波测风激光雷达测量体积的存在,测量体积内多个风速数据都会被系统探测到,为微小尺度内湍流的观测提供新的思路。由于连续波变焦特性,系统需要改变测量位置的变焦时间,需要优化快速变换测量位置的能力,在后续的研发及实验工作中需要改善系统变焦速度及数据采集速度,并搭配声光调制器及多种扫描模式实现风场的全面测量。
变焦式连续波测风激光雷达能够补充脉冲测风激光雷达的近场测量盲区,实现小尺度高精度高分辨率的非接触式测量以及空间尺度上的风速梯度测量,在风场内风速的测量研究、近地面及近建筑物复杂风场分析、海气边界层通量观测等领域有着广阔的应用前景。
致谢: 感谢王筱晔、张芯瑜等同学在数据处理工作中的帮助。感谢青岛镭测创芯科技有限公司秦胜光、王希涛等在设备搭建过程中的支持。感谢中国海洋大学激光雷达课题组全体成员在实验中的支持与帮助。
