基于TRIZ理论的辅助护理机器人结构设计①
2022-08-24毕亮亮王成军胡海霞常博斌
毕亮亮, 王成军, 胡海霞, 常博斌
(安徽理工大学a.机械工程学院,b.人工智能学院,安徽 淮南 232001)
0 引 言
我国人均寿命显著提升,老龄化现象愈发明显[1];人口老龄化与意外事故频发导致失能人数增加,辅助护理机器人逐渐成为医疗、家庭领域的一个研究热点[2-3]。刘玉鑫等人[4]研制出一种仿人背抱式移乘护理机器人构型,通过模仿人背人的动作可以实现患者的移乘护理。陆晨迪等人[5]在完成护理机器人设计的基础上,研究了一种主体由腰部和双臂组成的护理机器人,实现了对患者的抱举移动。许多学者利用TRIZ方法,研制出多种护理设备。贾丙琪等人[6]利用TRIZ进行创新设计,得到一款具有助力与缓冲两种工作状态的下肢外骨骼。张欣等人[7]采用功能裁剪法简化组件,优化一种养老护理床,降低了成本,增强系统可靠性。曾曦等人[8]基于QFD/TRIZ集成模型对老年轮椅进行改进设计,使得自主挪移或起身站立更加方便。
根据TRIZ在设计领域取得的成效[9],论文基于TRIZ理论设计出一种新型辅助护理机器人。新型吊带架采用并联机构可实现患者的调姿移位护理;悬吊臂与驱动装置组合实现了患者辅助行走、蹲起等康复训练。进一步对该机构关键结构件进行运动学分析,验证结构的合理性。
1 TRIZ理论对工程问题的分析
1.1 问题描述
如图1所示为电动移位机,使用坐垫承载患者,通过悬吊臂将患者吊起,利用电动推杆上下调节患者位置。该机构存在以下问题:(1)半失能患者无法进行身体姿态的调节,仅通过电动推杆移动患者,导致患者的舒适性差、稳定性不足和移位机整体自由度不足;(2)移位护理能力单一,不能满足半失能患者进行康复训练如辅助行走、辅助下蹲和直立等功能。

图1 电动移位机
1.2 系统功能组件分析
功能分析是从功能的角度分析,找到工程系统中的功能缺点或存在问题的组件。当前分析系统的超系统组件为被护理者与护理者;系统组件有悬吊臂、吊带架、电动升降杆、坐垫、主体支柱、移动底盘;作用对象为被护理者。组件功能分析如图2所示,电动升降杆对悬吊臂和主体支柱的移动性不足,吊带架对被护理者的适应性不足,坐垫对被护理者的姿态调节不足,移动底盘对被护理者的移动有害,悬吊臂对吊带架的角度调节有害。
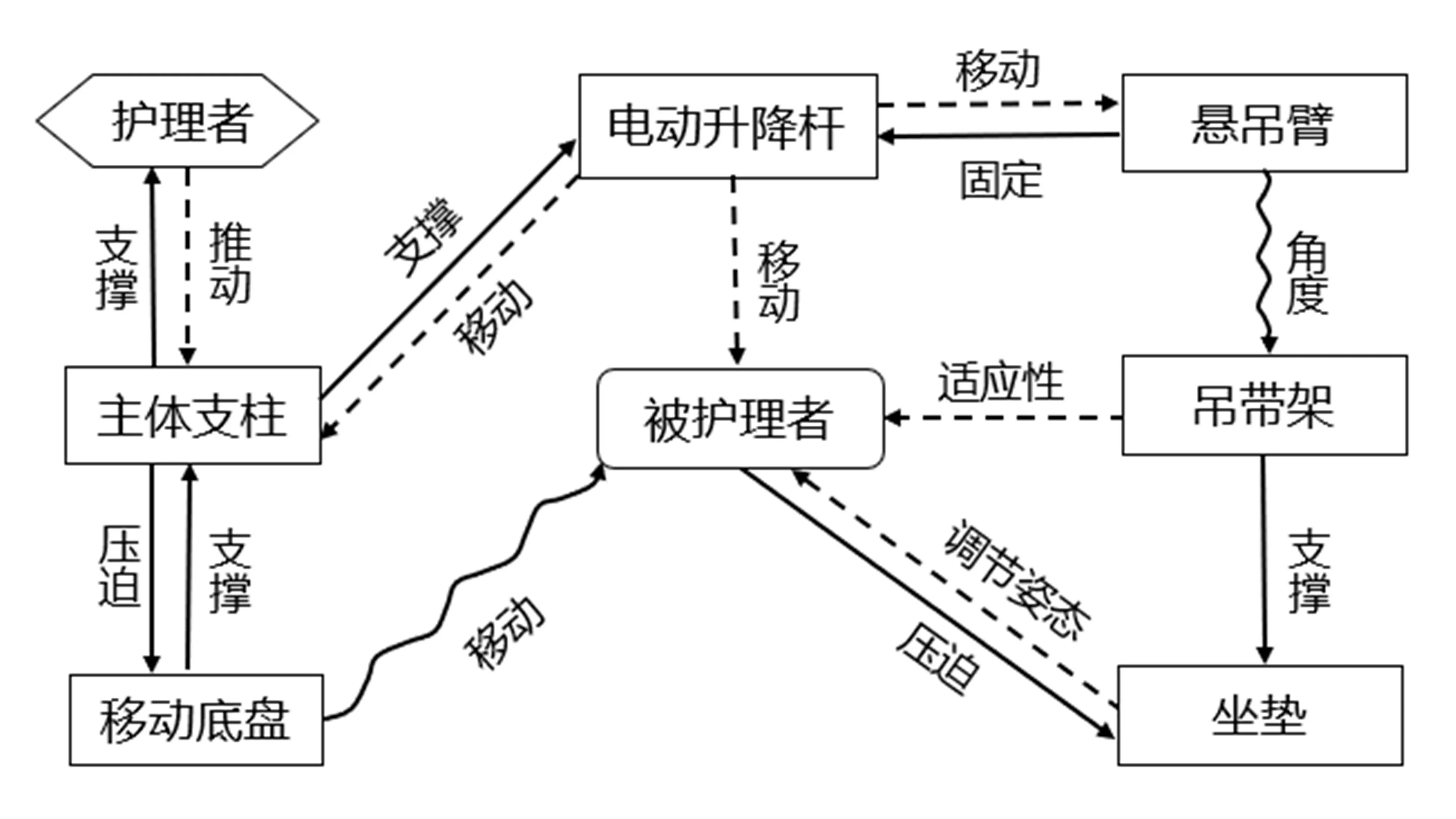
图2 功能模型图
1.3 因果轴分析
因果轴分析法是通过构建因果链探明事件发生的原因和产生结果之间关系的分析方法。针对问题描述,对当前系统进行因果轴分析,得到图3所示因果轴分析图。
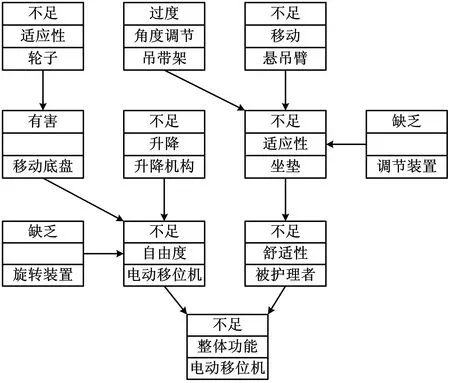
图3 因果轴分析图
对因果轴分析结果进行探讨,得出电动移位机几个功能因素:(1)吊带架无法调节坐垫使得患者无法调节姿态、舒适度不足;(2)仅靠电动升降杆和移动底盘移动,缺乏旋转装置;(3)设备功能过于单一,仅能移动患者,无法进行康复训练。
2 TRIZ工具对工程问题的求解
2.1 技术矛盾解决问题
通过组件功能模型图和因果轴分析,现有问题是吊带架无法使患者调节姿态;现有解决方案是更改吊带架几何形状,增加设备的适应性;该方案的缺点是增加了吊带架的体积。可将上述矛盾冲突的问题归纳为:适应性及多用性与物质的数量的冲突、自动化程度与运动物体的体积的矛盾。通过查找阿奇舒勒矛盾矩阵表,建立适合本问题的矛盾解决矩阵,如表1所示。
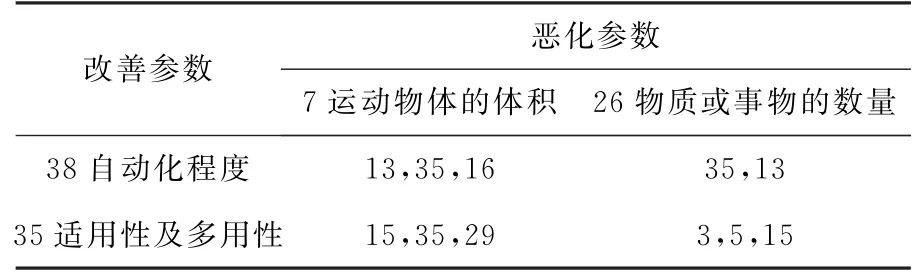
表1 TRIZ矛盾矩阵
对表1中的发明原理进行分析筛选,选择适合本设计的发明原理:13(反向作用原理)、15(动态化原理)、29(气压和液压结构原理)、35(物理或化学参数变化原理)。综合考虑表1所述矛盾分析解决问题的思路,采用15(动态化原理)、35(物理或化学参数变化原理)解决吊带架无法调节患者姿态的问题。
具体的方案为,设计新型吊带架,吊带架优选4-UPR并联机构,可实现两转动一平移。通过并联机构调节吊带架几何形状,从而满足患者的舒适度,提高整体的柔性度与自由度。底部两个弧形结构均固定柔性吊带,其中一侧固定在患者胸部位置,另一侧固定在患者腿部位置。调节患者胸部的伸缩杆内部的钢丝绳,通过电机驱动,达到调节患者上半部分姿态的功能;另一部分伸缩杆通过卡扣式调节腿部姿态,上端卡口采用万向节结构。改进后的吊带架如图4所示。

图4 4-UPR并联机构
2.2 物-场模型解决问题
通过技术矛盾分析,设计出新型吊带架,通过并联机构调节吊带架的几何形状可以有效解决患者移乘时姿态的调节,同时又产生新的矛盾,问题1:如何移动并联机构,确保患者的安全,提升整体系统的稳定性与灵活性。因此,根据TRIZ理论的不完整模型,应用一般解法1:补齐物-场模型中所缺失的元素(物质或场),构造完整有效的物-场模型,如图5所示。
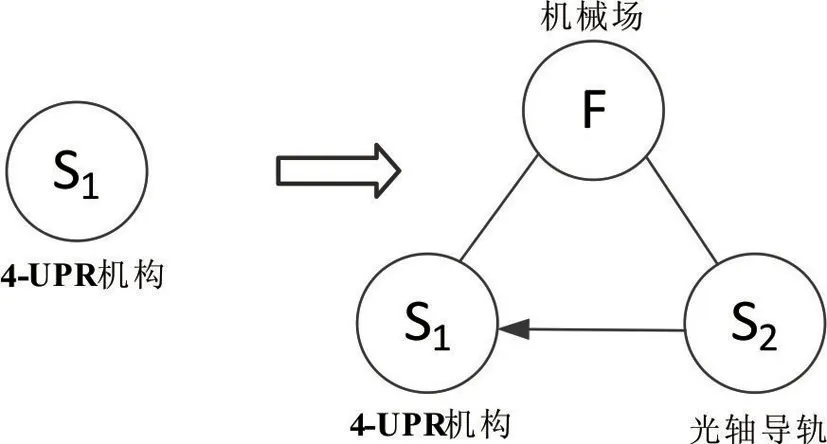
图5 补齐所缺失元素的物-场模型图
在并联机构上端的公共接口分别安装滑块,四个滑块安装在两个光轴导轨上。两光轴导轨分别固定在两前伸杆上,每个前伸杆的顶端外侧安装电机,电机轴上安装定滑轮;前伸杆的末端也装有定滑轮,两定滑轮通过钢丝绳连接,把四个滑块固定在钢丝绳上。通过电机带动钢丝绳转动,实现钢丝绳的往复运动,从而达到驱动并联机构的功能,实现患者的平移。前伸杆末端的定滑轮设有张紧装置,可以有效解决钢丝绳因长时间运转变松导致传动精度降低的情况。悬吊架优化设计如图6所示。
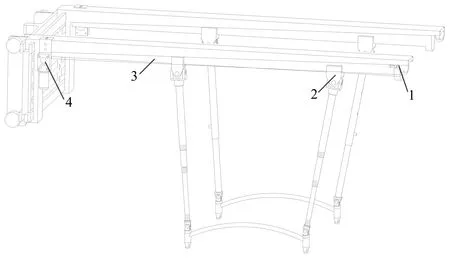
图6 悬吊臂优化设计图
问题2:电动推杆只能上下移动,自由度不足,缺乏旋转装置,导致整体自由度不足。根据TRIZ理论效应不足的完整模型,TRIZ提供了3种一般解法:一是用另一个场(F2)代替原来的场F;二是增加另外一个场F2来强化有用效应;三是引入一个物质S3并加上另一个场F2来提高有用效应。综合比较3种解法,优先采用第3种解法,如图7所示。根据上述资源分析,提出解决问题的方案:在改进后的主体支柱下方增加旋转装置,通过电机驱动,可以实现主体支柱的旋转,从而提升患者更好的移动效果。优化后设计如图8所示。
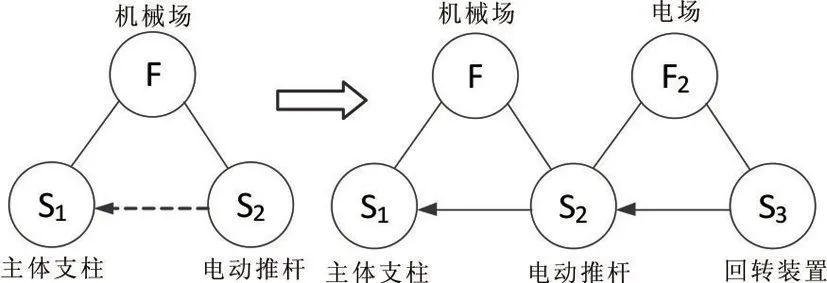
图7 增加另外物质和场的物-场模型图
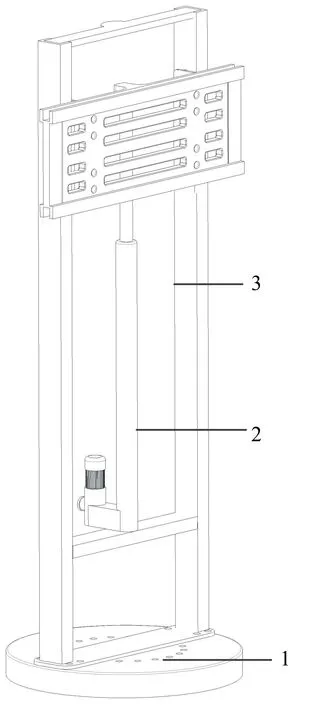
图8 驱动装置优化设计图
根据TRIZ理论创新思维与方法,对文中所得方案进行组合分析,设计出一种新型辅助护理机器人,如图9所示。
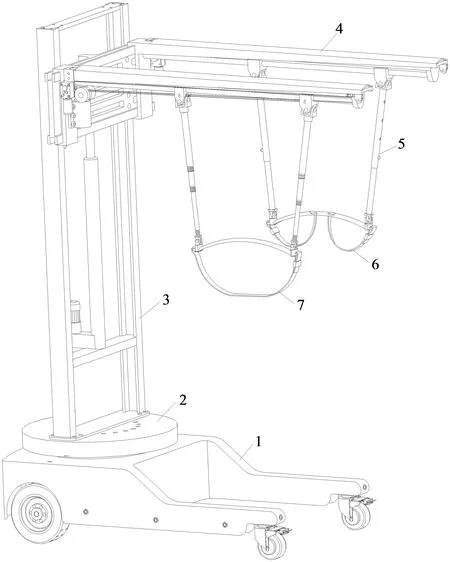
图9 辅助护理机器人总体图
辅助护理机器人由移动底盘、回转装置、主体支柱、前伸杆、吊带架和腿部、胸部吊带组成。其功能主要包括:实现卧床患者的自适应性卧床移位;进行清洁、如厕;进行辅助站立、辅助行走训练。前伸杆上安装扶手,使用者可站在移动底盘挖空部位,扶握扶手,通过移动底盘小车牵引实现辅助行走;通过电动推杆的上下移动,实现蹲起训练。在符合护理学原则的前提下对不同体型和所处不同环境的患者进行移动和康复训练,能够有效替代传统人工护理。
3 吊带架运动规律分析
在Solidworks中建立吊带架三维模型,并将模型导入ADAMS软件中,如图10所示。添加对应运动副和驱动函数,利用ADAMS软件仿真,进行机构质心变化和速度运动性能分析,结果如图11、图12、图13所示[10-11]。

图10 吊带架ADAMS仿真图
如图11所示,并联机构在一个运动周期内,三个方向速度变化平缓,z轴方向速度变化最为明显,最大值为35mm/s;如图12所示,调节胸部的弧形结构最大位移量为250mm,调节腿部的弧形结构最大位移量为220mm;如图13所示,并联机构四条支链的最大位移量为300mm,四条支链运动平稳。
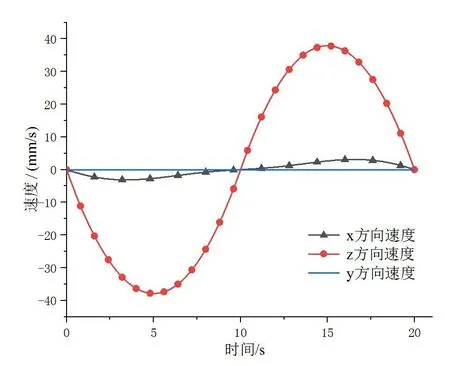
图11 并联机构x,y,z方向速度
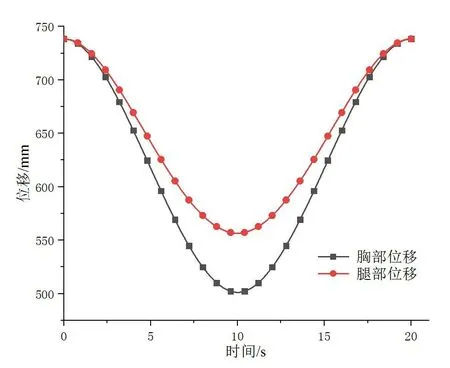
图12 两弧形结构位移
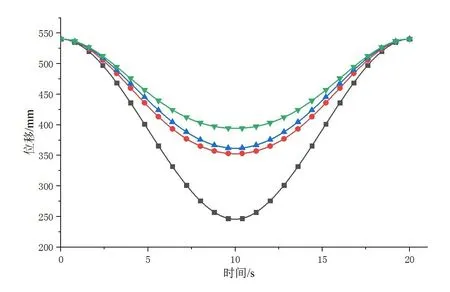
图13 四条支链位移
经过对并联机构进行运动学仿真分析,可以得到各运动变化运动变化平稳,无突变点,说明该机构的运动性能良好,在四条支链协同作用下实现患者安全移位,满足辅助护理移动要求。
4 结 论
对现有辅助护理设备存在的使用性能缺乏、适用对象有限等问题,运用TRIZ理论设计出一种新型辅助护理机器人。运用功能组件与因果轴分析,改进后的方案可以实现使用者卧床移位、如厕清洁和辅助康复训练等多种功能,能更好地满足患者的需求。运用ADAMS软件对关键结构件进行运动学分析,通过分析四条支链与两弧形结构位移曲线,验证了吊带架选用4-UPR并联机构运动性能良好,满足辅助护理作业要求。
