Nonlinear Dynamics of Nervous Stomach Model Using Supervised Neural Networks
2022-08-24ZulqurnainSabirManojGuptaMuhammadAsifZahoorRajaSeshagiriRaoMuhammadMubasharHussainFaisalAlanaziOrawitThinnukoolandPattarapornKhuwuthyakorn
Zulqurnain Sabir, Manoj Gupta, Muhammad Asif Zahoor Raja, N.Seshagiri Rao,Muhammad Mubashar Hussain, Faisal Alanazi, Orawit Thinnukooland Pattaraporn Khuwuthyakorn,*
1Department of Mathematics and Statistics, Hazara University, Mansehra, Pakistan
2Department of Electronics and Communication Engineering, JECRC University, Jaipur (Rajasthan), 303905, India
3Future Technology Research Center, National Yunlin University of Science and Technology, Yunlin, 64002,Taiwan
4Department of Applied Mathematics, School of Applied Natural Sciences, Adama Science and Technology University,Adama, Ethiopia
5Department of Mathematics, University of Punjab, Jhelum Campus, Pakistan
6Department of Electrical Engineering, Prince Sattam Bin Abdulaziz University, College of Engineering, Al Kharj, 16278,Saudi Arabia
7Research Group of Embedded Systems and Mobile Application in Health Science, College of Arts, Media and Technology, Chiang Mai University, Chiang Mai, 50200, Thailand
Abstract: The purpose of the current investigations is to solve the nonlinear dynamics based on the nervous stomach model (NSM) using the supervised neural networks (SNNs) along with the novel features of Levenberg-Marquardt backpropagation technique (LMBT), i.e., SNNs-LMBT.The SNNs-LMBT is implemented with three different types of sample data,authentication, testing and training.The ratios for these statistics to solve three different variants of the nonlinear dynamics of the NSM are designated 75% for training, 15% for validation and 10% for testing, respectively.For the numerical measures of the nonlinear dynamics of the NSM, the Runge-Kutta scheme is implemented to form the reference dataset.The attained numerical form of the nonlinear dynamics of the NSM through the SNNs-LMBT is implemented in the reduction of the mean square error (MSE).For the exactness, competence, reliability and efficiency of the proposed SNNs-LMBT, the numerical actions are capable using the proportional arrangements through the features of the MSE results, error histograms(EHs), regression and correlation.
Keywords: Nonlinear dynamics; nervous stomach system; reference dataset;levenberg-marquardt backpropagation technique; numerical outcomes
1 Introduction
The nonlinear dynamics of the nervous stomach model (NSM) have three segments, Tension (T),Food (F) and Medicine (M), i.e., TFM model.The generic form of the TFM system Tab.1 along with its initial conditions (ICs) is given as [1]:

The detail of each segment of the nonlinearTFMsystem is described together with the description of each parameter shown in the above Eq.(1) as:
T(y): One of the major target is stress or tension in the nonlinear dynamics based on the NSM out of the various physical indications.The effects of the nervous stomach create a problem in the human’s physique due to stress.
F(y): The spicy, oily and crispy items of food play a major role to disturb the stomach.Those individuals who regularly use such food items, they may feel the disorder in their digestive parts.The presence of the spicy food like capsaicin is a main reason to upset the stomach.
M(y): The medicine excess is also a big factor to disturb the stomach.The use of the medicine of the highest potency can recover the minor illnesses, but it creates the stomach’s indiscretion.
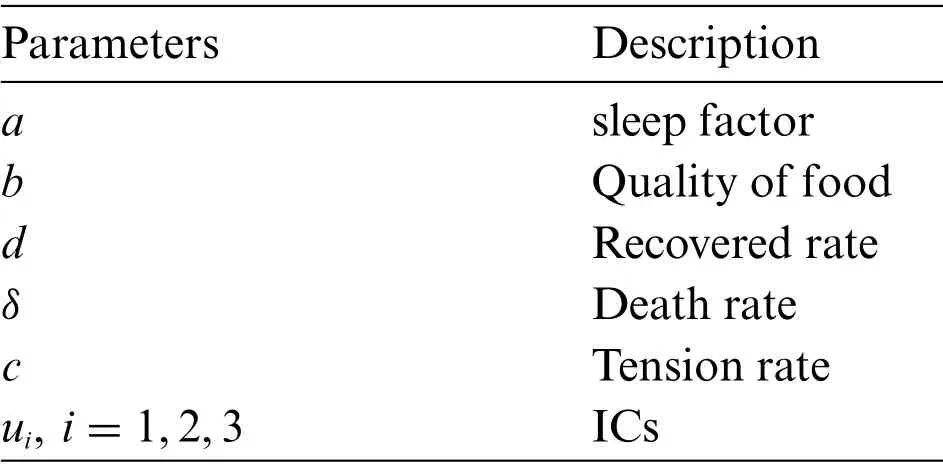
Table 1: Parameter details of the TFM
The stomach, like other organs in the human’s body has great significance.In human body every organ is linked to other organs, e.g., eye, nose and ear.If one organ doesn’t work properly, the other organs also feel its effects.Likewise, the stomach is linked to many other organs that play a vital role in maintaining the human health.The researchers studied the stomach for many years and the earliest Greeks professed the natural bitter gastric materials.In the beginning of the 16th century,the idea that stomach comprises acid in the digestion procedures presented by Sánchez et al.[1].The solvent features of digestive juice based on the animal tissues accessible by Reaumur.William Prout [2]studied the emission gastric acid nature andWilliam Beaumont presented the analysis of gastric fistula patient before three centuries.The gastric secretion by removal of the coeliac axis and vagotomy as healing interruptions was discovered in the beginning of the 19th century.Laidlaw et al.engrossed the histamine using the composite gastric secretion, which focused to the finding of the Popielski based the impacts of histamine gastric secretion.Bayliss et al.[3] discussed the secret in, while Edkins [4]investigated the gastrin performance.These stated discoveries recognized the gastric illnesses based pretentious advances in the pharmacologic connotation of peptic ulcer having H2-receptor presented by Sir James Black two centuries ago [5].Warrenet alin 1983 presented the acidic form of the diseases till the innovative of Helicobacter pylori discovery [6] and Jaworski discussedmany observations based on the bacterial inhabitants in the gastric juice.
The nonlinear dynamics of the NSM based TFM system is solved using the supervised neural networks (SNNs) along with the novel features of Levenberg-Marquardt backpropagation technique(LMBT), i.e., SNNs-LMBT.The obtained results have been compared with the designed database results based on the Runge-Kutta method.The data percentages to solve three different cases of the nonlinear dynamics of the NSM based TFM are designated 75% for training, 15% for validation and 10% for testing, respectively.The stochastic methods have been applied in diverse recent applications[7-10], but the nonlinear dynamics of the NSM based TFM system has never been explored by using the SNNs-LMBT[11,12].Few recent stochastic submissions are SITR dynamics [[13,14],singularthird kind of nonlinear system [15,16], Thomas-Fermi form of the model [17], heat conduction model [18],periodic differential singular system [19,20], functional models [21-23], dengue fever biological model[24], a multi-singular form of equations [25,26], prediction, delayed and pantograph models [27-29]and differential systems based on the fractional order [30-32].These well-known stochastic based applications inspire the authors to present a robust, consistent, accurate and reliable platform to solve the nonlinear dynamics of the NSM based TFM system using the SNNs-LMBT [33-35].Few novel features of the present study are provided as:
•A computational intelligent novel SNNs-LMBT is implemented to solve the nonlinear dynamics of the NSM based TFM system.
•The exact matching of the numerical outcomes with good measures based on the absolute error(AE) enhances the value of the proposed novel SNNs-LMBT to solve the nonlinear dynamics of the NSM based TFM system.
•The presentations using the related soundings onMSE, regression metrics, correlation measures and error histograms (EHs) validate the performances of the proposed novel SNNs-LMBT.
The remaining paper parts are organized as: The numerical performances of the proposed novel SNNs-LMBT to solve the nonlinear dynamics of the NSM based TFM systems are described in Section 2.The numerical results through SNNs-LMBT are presented in Section 3.The concluding outcomes with latent related soundings together with the future research reports are labeled in the Section 4.
2 Methodology
The proposed SNNs-LMBT is provided in two phases to solve the nonlinear dynamics of the NSM based TFM system.
•Essential explanations of the proposed SNNs-LMBT are provided.
•Implementation measures support the proposed SNNs-LMBT to solve the nonlinear dynamics of the NSM based TFM system.
The appropriate optimization based on the proposed SNNs-LMBT are provided in Fig.1 using the multi-layer procedures and proposed system form for a single neuron is plotted in Fig.2.The suggested SNNs-LMBT is implemented with the‘nftool’that is build-in procedure in‘Matlab’using the data as designated 75% for training, 15% for validation and 10% for testing, respectively.
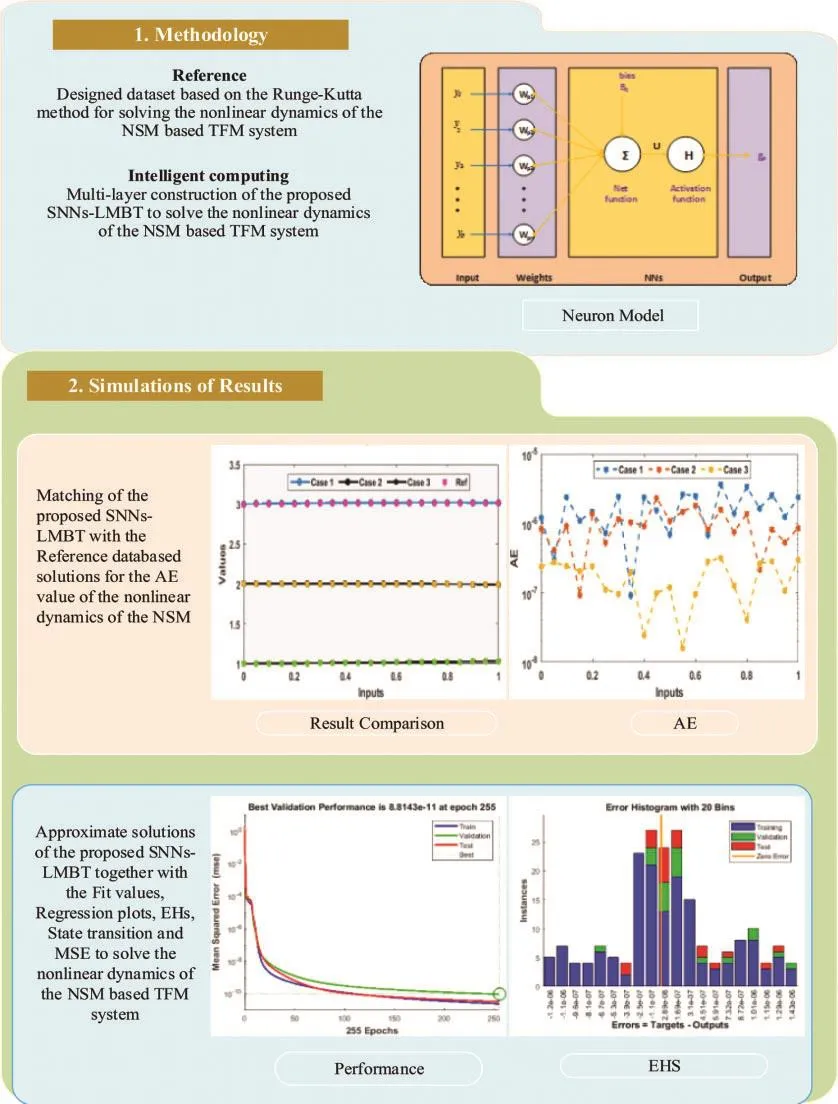
Figure 1: Workflow diagram of the proposed SNNs-LMBT to solve the nonlinear dynamics of the NSM based TFM system
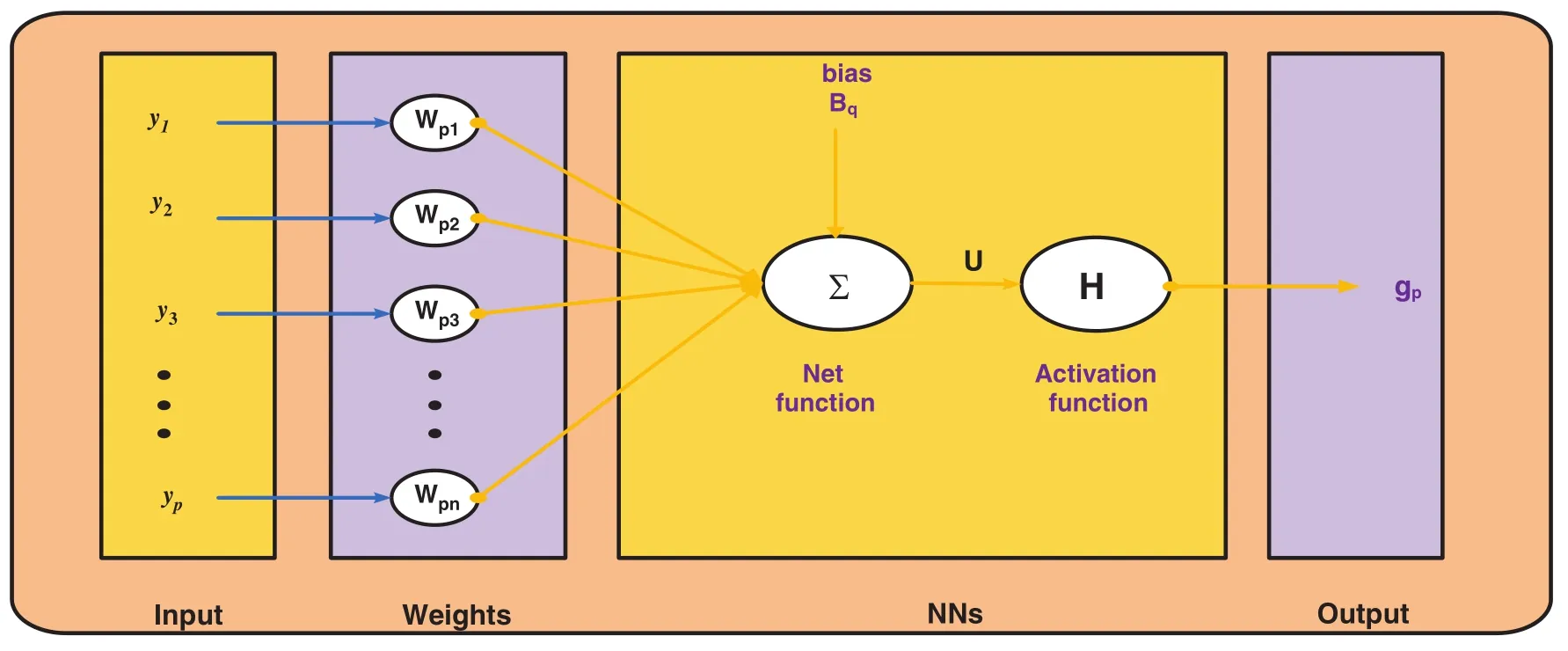
Figure 2: Proposed structure based on the single neuron
3 Numerical Simulations
This section indicates the numerical performances of the obtained results of three different cases based on the nonlinear dynamics of the NSM using the proposed SNNs-LMBT.The mathematical form of each case is given as:
Case-1: Consider the nonlinear dynamics of the NSM based TFM system witha= 0.2,b=0.1,c= 0.3,d= 0.4,δ= 0.5,u1= 0.9,u2= 0.7 andu3= 0.5.The mathematical form of the system (1) is given as:

Case-2: Consider the nonlinear dynamics of the NSM based TFM system witha= 0.5,b=0.1,c= 0.3,d= 0.4,δ= 0.5,u1= 0.8,u2= 0.6 andu3= 0.4.The mathematical form of the system (1) is given as:

Case-3: Consider the nonlinear dynamics of the NSM based TFM system witha= 0.8,b=0.1,c= 0.3,d= 0.4,δ= 0.5,u1= 0.7,u2= 0.5 andu3= 0.3.The mathematical form of the system (1) is given as:

The numerical performances are obtained using the SNNs-LMBT to solve the nonlinear dynamics of the NSM based TFM system with inputs (0, 1) and 0.01 step size.The‘nftool’command in Matlab is usedto solve the nonlinear dynamics of the NSM based TFM system using 15 numbers of neurons using the data as designated 75% for training, 15% for validation and 10% for testing, respectively.The achieved performance of the results using the SNNs-LMBT to solve the nonlinear dynamics of the NSM based TFM system is drawn in Fig.3.

Figure 3: Proposed SNNs-LMBT to solve the nonlinear dynamics of the NSM based TFM system
The graphs of the designed SNNs-LMBT to solve the nonlinear dynamics of the NSM based TFM system are provided in Figs.4-12.The accomplished numerical procedures of all three cases of the nonlinear dynamics of the NSM based TFM systems are provided in Figs.4 and 5 using the performance and transition states.The calculated outcomes based on MSE for the training,best curve, authentication and testing states are provided in Fig.4 to solve the nonlinear dynamics of the NSM based TFM system.The best performances for the nonlinear dynamics of the NSM based TFM system are obtained at epoch 125, 71 and 74, which lie around lie around 1.7601×10-10,1.3029×10-11and 2.3984×10-14, respectively.Fig.5 indicates the gradient values of the designed SNNs-LMBT to solve the nonlinear dynamics of the NSM based TFM system, which are calculated as 9.9838×10-08, 9.9615×10-08and 9.8429×10-08.These graphical plots indicate the precision,accuracy and convergence of the designed SNNs-LMBT to solve the nonlinear dynamics of the NSM based TFM system.The fitting curve plots for each case of the nonlinear dynamics of the NSM based TFM system are drawn in Figs.6-8, which authenticate the comparison of the obtained outcomes through the designed SNNs-LMBT and the reference database results.The maximum values of the error plots are plotted using the training, authentication and testing through the designed SNNs-LMBT to solve the nonlinear dynamics of the NSM based TFM system.The EHs are plotted in Fig.9a-9c, whereas the plots of regression are provided in Figs.10-12 to solve the nonlinear dynamics of the NSM based TFM system.The correlation plots are provided to validate the regression analysis.It is indicated that the correlation values are noticed around 1 to solve the nonlinear dynamics of the NSM based TFM system that shows the perfect model.The plots of testing, authentication and training designate the exactness of the designed SNNs-LMBT to solve the nonlinear dynamics of the NSM based TFM system.Moreover, the convergence for the MSE are capable for training,authentication, epochs, backpropagation values, testing and complexity investigations are given in Tab.2 to solve the TFM system.
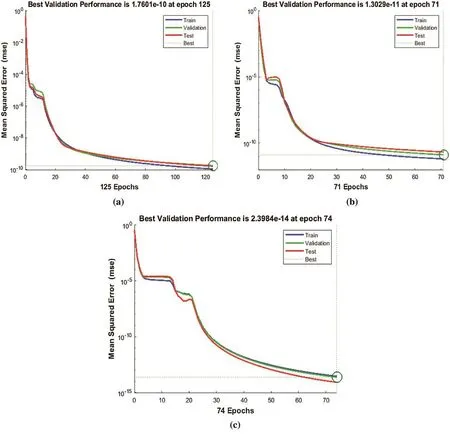
Figure 4: Performance through MSE results using the proposed SNNs-LMBT to solve the nonlinear dynamics of the NSM based TFM system (a) Case I: MSE values for the NSM based TFM system (b)Case II: MSE values for the NSM based TFM system (c) Case III: MSE values for the NSM based TFM system

Figure 5: State transition using the proposed SNNs-LMBT to solve the nonlinear dynamics of the NSM based TFM system (a) Case I: State transition for the NSM based TFM system (b) Case II:State transition for the NSM based TFM system (c) Case III: State transition for the NSM based TFM system
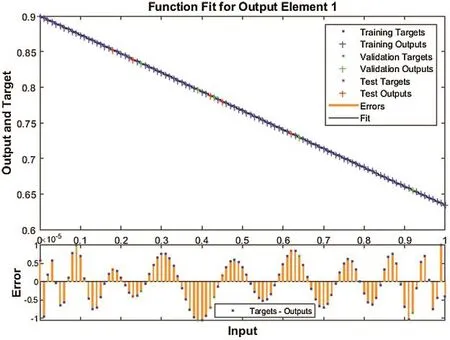
Figure 6: Case 1: Result comparison through the proposed SNNs-LMBT to solve the nonlinear dynamics of the NSM based TFM system
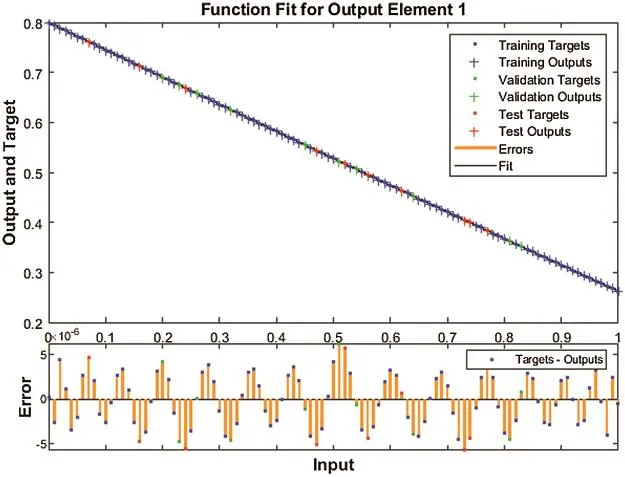
Figure 7: Case 2: Result comparison through the proposed SNNs-LMBT to solve the nonlinear dynamics of the NSM based TFM system
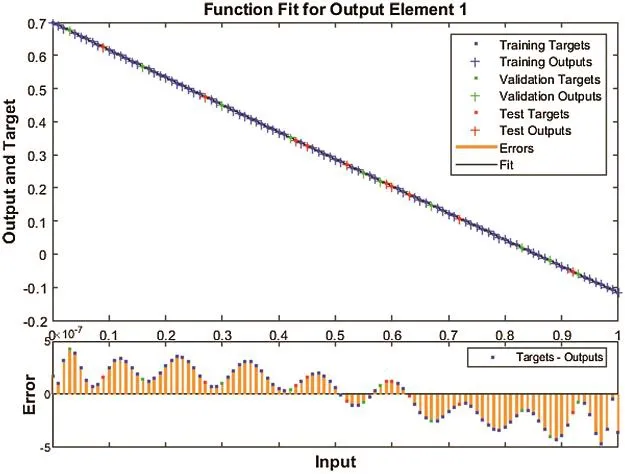
Figure 8: Case 3: Result comparison through the proposed SNNs-LMBT to solve the nonlinear dynamics of the NSM based TFM system
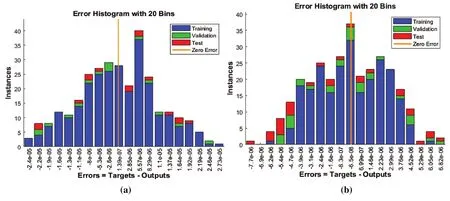
Figure 9: (Continued)
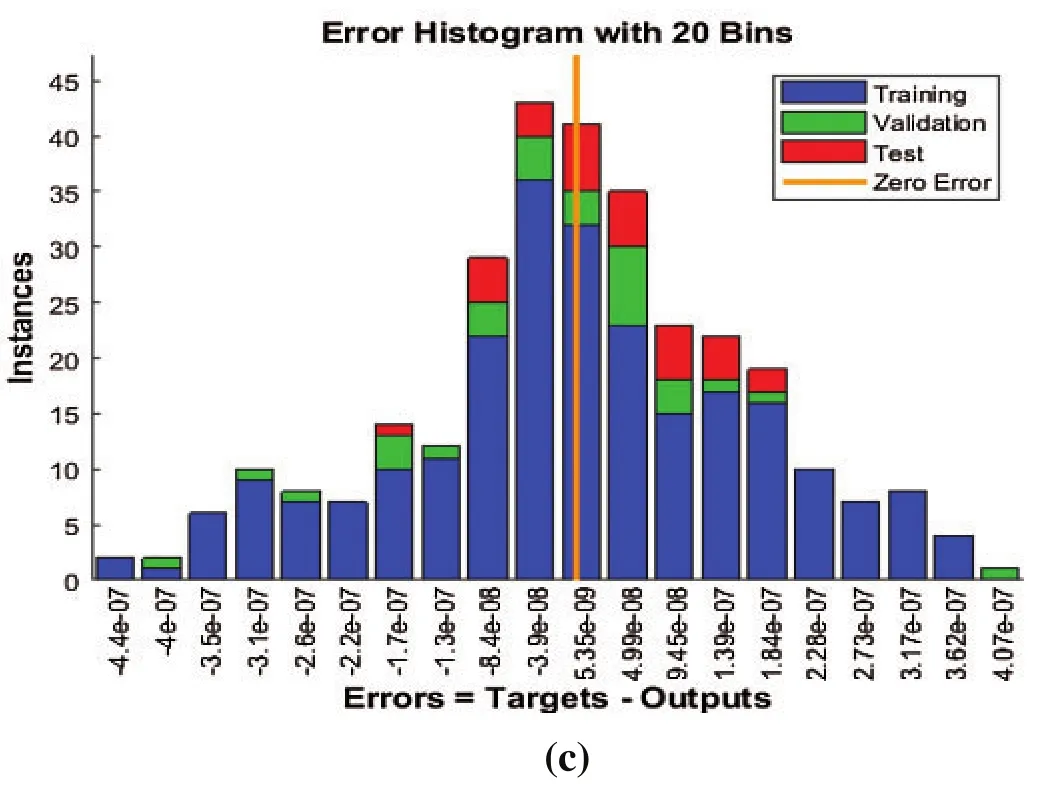
Figure 9: EHs values for the proposed SNNs-LMBT to solve the nonlinear dynamics of the NSM based TFM system (a) Case I: EHs for the NSM based TFM system (b) Case II: EHs for the NSM based TFM system (c) Case III: EHs for the NSM based TFM system
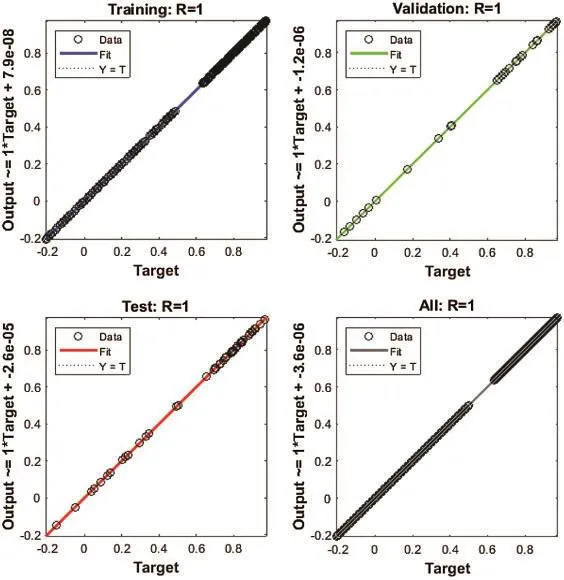
Figure 10: Case I: Regression plots for the NSM based TFM system
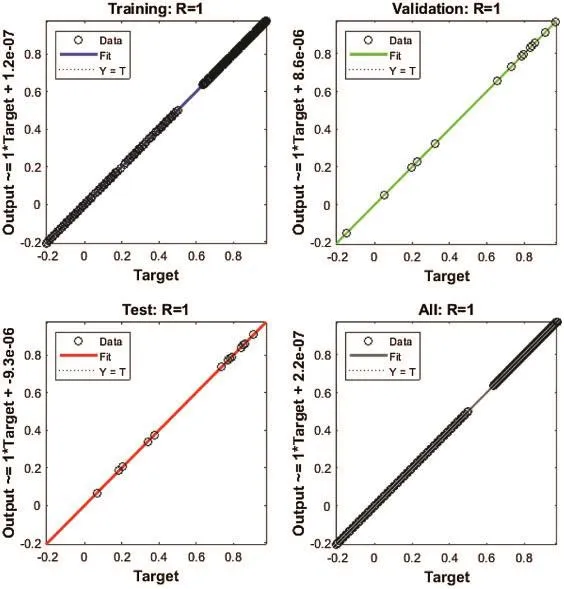
Figure 11: Case II: Regression plots for the NSM based TFM system
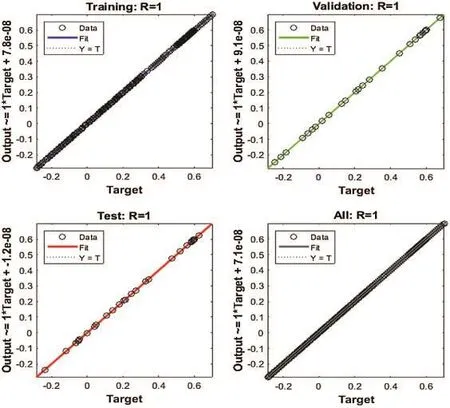
Figure 12: Case III: Regression plots for the NSM based TFM system

Table 2: Proposed SNNs-LMBT to solve the TFM system
The result comparisons are plotted in Figs.13 and 14 to solve the nonlinear dynamics of the NSM based TFM system.The outcomes of the parametersT(y),F(y) andM(y) using the proposed SNNs-LMBT to solve the nonlinear dynamics of the NSM based TFM systems are drawn in the subfigures 13(a-c).The overlapping of the outcomes is noticed, which designate the exactness and precision of the proposed SNNs-LMBT to solve the nonlinear dynamics of the NSM based TFM system.The AE plots are drawn for each case of the nonlinear dynamics of the NSM based TFM system in Fig.14.The parameter values based onT(y),F(y) andM(y) is drawn in Figs.14a-14c for each case of the TFM system.It is noticed in Fig.14a, that the AE for T(y) lie around 10-05to 10-06for case I and II,while the AE for case III lie around 10-06to 10-08.Fig.14b shows the AE for F(y) lie around 10-04to 10-06for case I and II, while the AE for case III lie around 10-06to 10-10.Similarly, the AE for M(y) is noticed in Fig.14c that lie around 10-05to 10-06for case I and II, while the AE for case III lie around 10-07to 10-08.These closely matched values of AE indicate the correctness of the proposed SNNs-LMBT to solve the nonlinear dynamics of the NSM based TFM system.

Figure 13: Comparison performance based on the proposed SNNs-LMBT to solve the nonlinear dynamics of the NSM based TFM system (a) Case 1: Results of the parameters T(y) (b) Case II:Results of the parameters F(y) (c) Case II: Results of the parameters M(y)
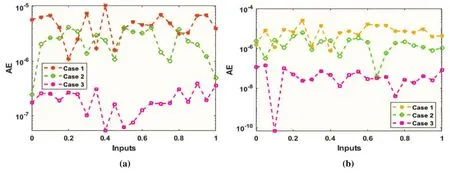
Figure 14: (Continued)
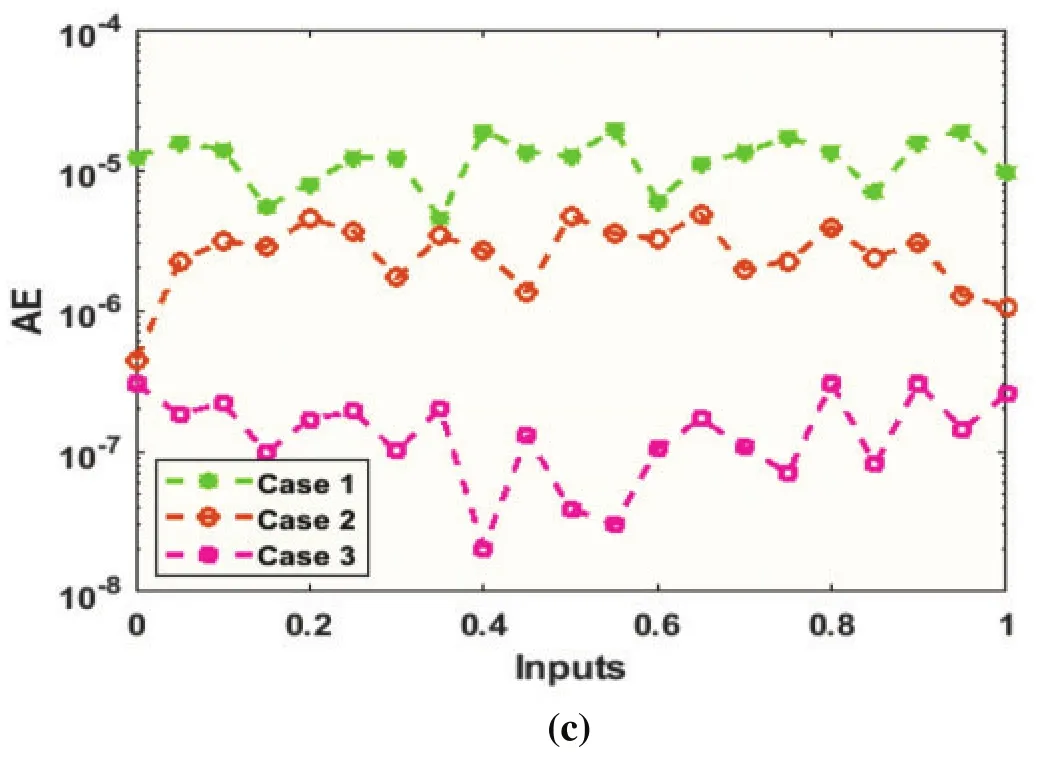
Figure 14: AE values based on the proposed SNNs-LMBT to solve the nonlinear dynamics of the NSM based TFM system (a) Case I: AE values for the parameters T(y) (b) Case II: AE values for the parameters F(y) (c) Case III: AE values for the parameters M(y)
4 Conclusions
The current investigations are related to solve the nonlinear dynamics of the nervous stomach model based on the three factors; Tension, Food and Medicine are using the proposed supervised neural networks along with the Levenberg-Marquardt backpropagation technique, i.e., SNNs-LMBT.The stomach is linked tomany other organs that play a vital role in maintaining the human health.The SNNs-LMBT is applied to the sample data testing, training, and authentication.The percentages used for these statistics for solving three different variants of the nervous stomachmodel are designated 75% for training, 15% for validation and 10% for testing, respectively.To check the brilliance, excellence, exactness and precision of the SNNs-LMBT, the matching of the outcomes is obtained to solve the nonlinear dynamics of the nervous stomach model.The presentations based on the MSE convergence are applied to the testing, best curve, training and authentication for each factor in the nonlinear dynamics of the nervous stomach model.The correlation performances are proficient to authenticate the regression procedures.The gradient values using the step size are attained for each factor of the nonlinear dynamics of the nervous stomach model.Moreover, the exactness, precision, correctness is observed using the graph aswell as the numerical conformations through the EHs, theMSE catalogues, regression dynamics, and convergence plots, respectively.
In future, the proposed SNNs-LMBT can be explored to solve the fractional models, lonngrenwave models, fluid systems and higher order singular models [36-44].
Acknowledgement:The authors would like to thanks the editors of CMC and anonymous reviewers for their time and reviewing this manuscript.
Funding Statement:This work was supported by the Chiang Mai University.
Conflicts of Interest:The authors declare that they have no conflicts of interest to report regarding the present study.
杂志排行

Computers Materials&Continua的其它文章
- Fusion-Based Deep Learning Model for Hyperspectral Images Classification
- Parkinson’s Detection Using RNN-Graph-LSTM with Optimization Based on Speech Signals
- Identification and Classification of Crowd Activities
- Classification COVID-19 Based on Enhancement X-Ray Images and Low Complexity Model
- A Novel Framework for Windows Malware Detection Using a Deep Learning Approach
- A Framework for e-Voting System Based on Blockchain and Distributed Ledger Technologies