无人机红外自主巡检方法研究与应用
2022-08-23陈剑涛段春瑞李翔
陈剑涛,段春瑞,李翔
(国网宁夏电力有限公司石嘴山供电公司,宁夏 石嘴山 753000)
0 引言
电网安全关系国家公共安全和国计民生,输电线路遭受台风、雷击、树障威胁、人为破坏及设备老化是影响电网安全的主要因素,因此,对输电线路巡视检查是保障输电线路安全稳定运行的重要手段[1]。目前,宁夏地区110 kV以上输电线路超过15 000 km,每条输电线路一般每月都需巡检一次,而电网巡检多采用人工巡视,并且由于输电线路工作环境艰苦,人工巡检效率低,成本高,同时,随着电网建设快速推进,输电线路的巡检工作量与日俱增,巡视难度不断加大,对输电线路巡检的时效性及精度要求不断提升。近年来,无人机技术的迅速发展可以解决许多人工难以处理的问题,无人机技术在电网中的应用前景非常广阔[2],因此,通过研究激光雷达自动避障技术、红外成像及无人机自主巡检等方面的技术,以提升对输电线路的巡检能力,并且及时发现输电线路存在的隐患。
1 雷达避障技术
1.1 激光扫描测距雷达
无人机避障硬件设施采用360°激光扫描测距雷达,型号为iLiDAR-S30,基于DJI-PAYLOAD SDK开发的360°激光扫描测距雷达,打通大疆全线通讯链路,可直接挂载云台。配合无人机智能操作系统可实现与环境的实时互动,帮助用户完成复杂的线路巡视任务。其主要参数如表1所示,雷达如图1所示。

表1 iLiDAR-S30激光扫描测距雷达参数

图1 激光扫描测距雷达
1.2 基于RRT算法的避障方法
由于输电线路通道环境复杂,通道内建筑物、树、竹、车辆机械等障碍物时有出现,因此,无人机自主巡检必须根据环境约束条件,采用合适的障碍物躲避算法,从而调整无人机的飞行航线,避免与障碍物碰撞[3]。本文避障算法的基础是快速扩展随机树,其核心思想是对于特定区域采用随机寻点的方式进行采样、数据处理及分析,根据目标要求判断采用标准,并以同样的方式在区域内对其他物体采样。假设无人机的飞行区域可用集合A表示,集合A1为空间内的可飞行区域,集合A2为不可飞行的障碍物区域,则其集合关系可用式(1)表示。

因此根据式(1)的集合关系,可将雷达避障问题转化成在有限空间内以选定起点为出发点,终点为目的地,在能躲避障碍物的前提下,自动寻求起点和终点连线,算法如图2所示,图中空白区域为A1,灰色区域为A2。
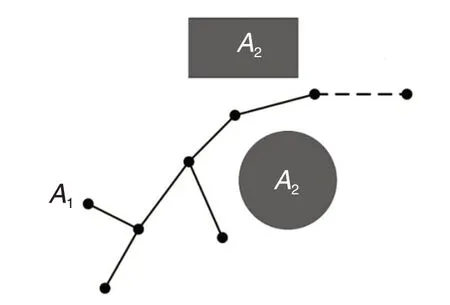
图2 算法
该算法是将空间集合问题转化为空间路线问题的搜索算法,因此该算法共分为随机树生成和反向搜索两个连续的阶段。
随机树生成是以迭代次数为限制的前提下,采用不断增量的方式构建无人机飞行路径信息。首先,在有限空间内随机生成符合算法条件的第一个目标点;然后,以目标点为中心随机生成满足约束条件的空间中的其他点,在增量约束条件下,算法会寻找与第一个目标点距离最为接近的点为新的目标点,并与第一个目标点连接,形成搜索树的第一枝;第一枝搜索完成后,新的目标点会与下一个距离最为接近的点为新的目标点,两者连接形成搜索树的第二枝,以此类推形成搜索树。若两个节点之间存在障碍物,则两个目标点不会连接,会形成断点,所以在两个节点间存在障碍物且无法规避的情况下,系统会自动舍弃该节点并重新生成新的节点[4]。利用Matlab对基本快速扩展随机树算法进行仿真,仿真地图为500 m×500 m的二维空间,从二维空间的中心向空间四周进行扩散。采用快速扩展随机树算法在设定的空间分别迭代扩展10步、100步、500步的效果如图3所示。
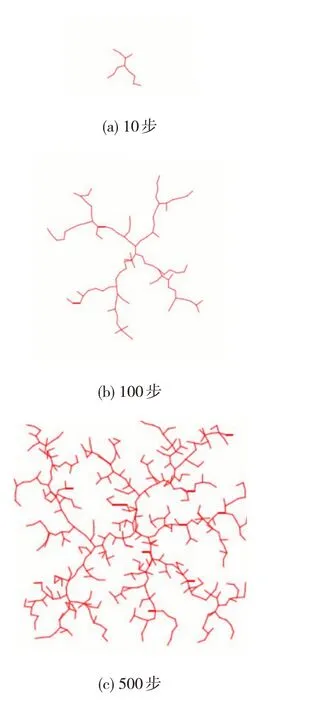
图3 快速扩展随机树算法
快速扩展随机树算法在迭代过程中,在二维空间内随机均匀采样,快速生成随机树,随着迭代次数的增加,快速扩展随机树朝着二维空间的四个方向进行扩展,当迭代次数达到一定的次数时,快速扩展随机树的节点会充满整个二维空间。以上说明快速扩展随机树算法搜索路径成功率较大和搜索的稳定性较好,也体现了快速扩展随机树算法的概率完备性。
反向搜索是在随机树生成的基础上以终点为目标,与搜索树前端搜索算法相似,以搜索树上距离目标点最近的点为目的地,形成起点和目的地间的有效路线[5],此路线即为规划可行的航线。
1.3 无人机路径规划
在三维环境中,对于某个点是否满足要求判断较为困难,无法在三维空间中对各个点进行逐个检查,因此本文从概率论的角度出发,对于节点的概率是否达到数值c为判断依据,设节点A在空间的坐标为(x1,y1,z1),节点的下一级节点B坐标为(x2,y2,z2),则采样后点c(x,y,z)的坐标用式(2)表示。

根据上述计算方法和原则将空间环境下路线规划分为以下八步:第一步,初始化任务参数;第二步,采用数据化的形式对三维空间进行模拟分析,生成三维空间中的障碍物模型,并且对空间的边界进行定义;第三步,对飞行线路的起点和终点进行定义,确定飞行线路的长度和搜索树的步长;第四步,判断初始起点和终点的距离与步长关系,若距离小于步长进入第八步,否则进入下一步;第五步,对目标点编辑,用三维坐标的形式赋予其在空间中的路线属性,在此基础上确定终点的临近节点;第六步,不断生成随机节点;第七步,判断节点连接是否存在障碍物,若存在障碍物则舍弃该节点,不断重复第六步和第七步操作;第八步,在众多随机树中寻找符合要求的起点与终点搜索树。
以上步骤如图4所示,随机生成下一节点p和节点h,因节点h存在障碍物,则舍弃节点h;节点p不存在障碍物,则与节点p连接。
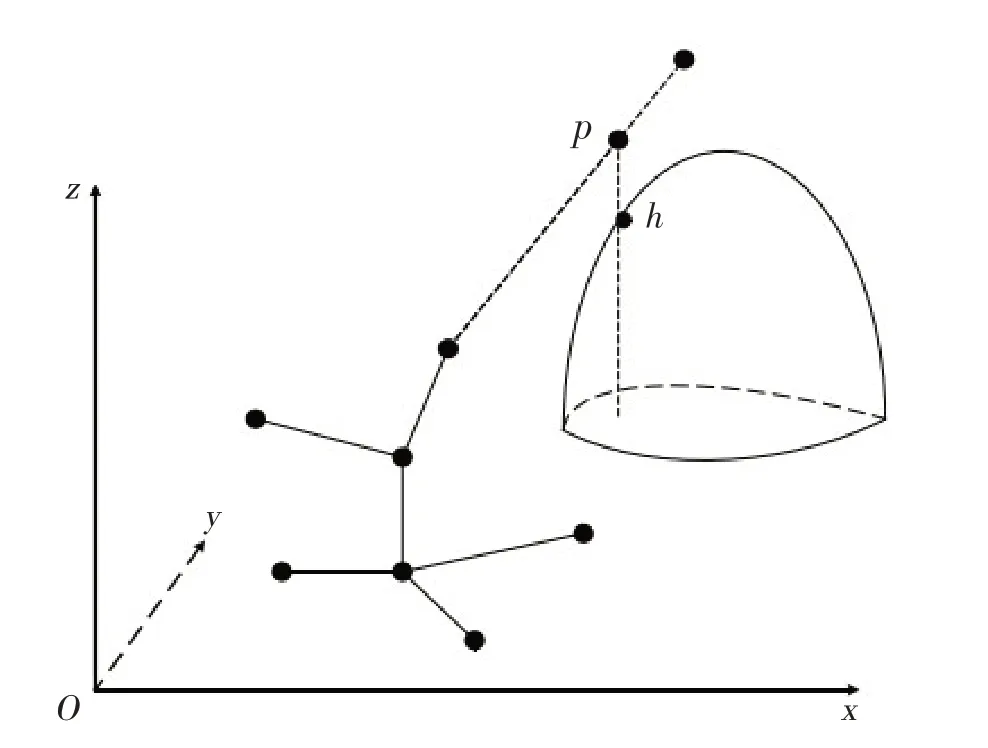
图4 三维空间路线规划
对于上述步骤,关键点是确定碰撞点进行碰撞检查。按照以上测距雷达搜索模型和算法对自主研发的雷达在无人机搭载条件下进行自主避障试验分析,试验用无人机是四旋翼的大疆经纬M210,装载的避障雷达是iLiDAR-S30。
本文开发的无人机搭载雷达技术能有效识别树障等障碍物,可以测量出与潜在障碍物之间的距离,当无人机与障碍物的空间距离低于安全值时,无人机会绕开障碍物,始终保持合适的安全距离,从而实现避障功能。
2 红外成像增强技术
无人机搭载的红外设备可形成物体的红外影像,利用导线的红外影像判断导线是否存在缺陷故障,它是利用物体发射的辐射信息,物体温度不同,其辐射信息也不尽相同[6],因此从其成像原理中可知红外成像技术的噪声较大。本文采用直方图均衡化的方法调整图像的灰度范围和分布,图像处理的原则是设置一个阈值T(临界值),当某一灰度级像素频率P大于T时取最大值T,否则取原有的频率,其计算公式如式(3)所示。

经过图像处理后的输电线路红外图像如图5所示。

图5 红外图像与灰度直方图
根据公式(3)的图像处理原则,处理图像时必须设置合适的c值。若c值过大,处理后图像与原图像并无太大差别,达不到预期效果;若c值过小,图像的有用信息过滤量会增加,图像会出现失真现象。如图5(b)、图5(d)所示,通过相关数据对比可以发现,基于增强技术的应用,能够有效改善红外图像处理的实际效果,尤其是数据分析的精准度有了大幅提升,可为后续分析提供更为全面的参考;因此在利用无人机红外技术进行自主巡检时,必须结合数据分析的实际要求,以及根据软件系统运行的要求,设置对应的阈值,确保图像处理效果能够满足分析应用的要求,为提升分析质量提供支撑。
3 巡检控制系统
无人机对电力线路巡检必须依靠一套完善的地面操控系统以实现对飞行状态的控制和巡检数据的提取分析。该控制系统是在Android操作系统上配套使用大疆SDK技术,采用多旋翼无人机自动驾驶智能控制系统,该系统适用于输电线路巡视的无人机移动端操作平台,控制系统模块如图6所示。系统具有自主通道巡视、树障巡视、正斜射影像、全景采集及红外巡视等多种智能作业模式,可完成不同通道环境下长距离、超视距的无人机自动控制,满足各种应用场景的数据采集需求。
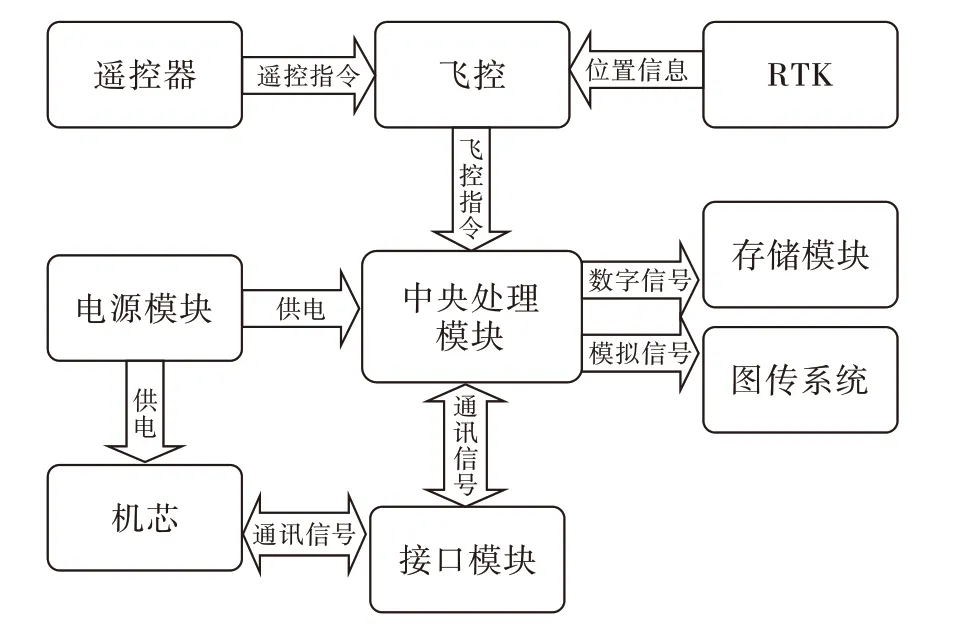
图6 控制系统模块
自主巡检模块根据地图信息可建立电力铁塔的坐标位置并导入系统中,系统会根据选定的巡检信号塔位置信息按照本文的快速扩展随机树算法进行自主巡检并生成巡检日志。
再利用系统全景采集模块对周围环境数据进行采集,系统提供自动和手动两种模式,最多支持一次添加三个点进行全景采集任务,全景采集模块需操作者设置飞行高度,利用机载雷达和红外设备对区域内进行景象采集,生成采集文件。
4 实践应用
搭载自主避障功能无人机可在4 min内自主完成一基杆塔的巡检工作,操作员操作无人机巡检能够大幅缩减工作时间,比传统人工巡检线路提高数倍效率,减少了人工劳动强度。巡检拍摄照片时,高清摄像头可以自动调整焦距,自如放大杆塔金具细节,可以针对性诊断杆塔故障问题,并对拍摄质量进行复核,如识别到曝光、虚焦及有画质问题的图片,无人机将自动调整朝向及相机云台角度,并再次拍摄,确保拍摄质量。对于线路耐张引流线夹等易发热部件,红外摄像头还可实时感知被检测目标以及周围环境,完成测温工作。通过完善的避障方法,使无人机巡检可自如应对复杂的环境干扰,保持一定的安全距离,以此保障电力系统的运行安全性和可靠性。
2021年,已完成1 596 km架空输电线路的无人机激光点云数据采集及航线规划工作,实现对石嘴山地区输电线路自主巡检全覆盖,已对147条输电线路开展无人机红外自主巡检工作,拍摄了5 000余张红外图像,通过后台缺陷识别系统,发现导线损伤11处、绝缘子M销脱出的危急缺陷18处,杆塔螺丝松动缺陷百余处。无人机红外巡检技术为输电线路运行检修管理工作提供依据,提高输电线路运行检修管理工作质量及供电服务质量,通过及时处理发现的问题,有效保障输电线路的安全可靠运行。
5 结论
以激光扫描测距雷达、无人机及红外仪为硬件基础,对适用于电力巡检的无人机自主巡检系统进行研究。系统采用反向搜索随机算法利用iLiDAR-S30激光雷达实现检测线路的自主避障,利用直方图均衡化的方法将红外设备采集的图像进行灰度处理,能够清晰地看到线路的缺陷故障,同时可以应对不同的通道环境,完成自主红外巡视工作。通过无人机搭载激光测距雷达和红外设备能够实现对输电线路的自主巡检,避免了人力巡检效率低、安全性差和巡检质量差等方面的不足。