基于UWB的双向测距TOA定位系统设计
2022-08-23中国电子科技集团公司第五十四研究所王丹丹许磊
中国电子科技集团公司第五十四研究所 王丹丹 许磊
针对传统室内定位技术定位精度低、抗干扰能力差的问题,设计了一种基于UWB的双向测距TOA定位系统。首先对其系统架构和UWB技术进行了概述。然后提出采用双向测距算法进行距离测量,避免了定位标签和定位基站时钟同步的难题。最后,运用TOA估计求解出定位标签的位置坐标。该系统实现简单,功耗低,能够满足在室内复杂环境中精确实时定位的需求。
随着我国北斗三号全球卫星导航系统的建成及开通,基于北斗系统的导航定位已经广泛应用于农林业、交通运输、防灾减灾、公安应急等诸多领域。但由于卫星定位属于室外定位,其自身技术特点使其容易受到建筑物遮挡,难以接收到足够的卫星信号进行室内定位。而人们所处环境日益复杂,对室内位置服务的需求强烈,如隧道、矿井、医院人员定位等。如何实现室内定位并提高室内定位精度成为较为热门的研究方向。
目前比较常用的室内定位技术有RFID、ZigBee、WiFi、蓝牙等,可以很好的弥补北斗定位在室内环境中的缺陷。但是RIFD技术只能识别目标是否存在,无法实时定位;且ZigBee、WiFi、蓝牙只能定位约几十米的范围,定位精度约为3m左右。超宽带(Ultra Wide Band,UWB)技术是近几年新兴的一种无线通信技术,不需载波对数据进行调制,仅使用纳秒级非正弦波窄脉冲进行数据传输,传输速率高达几十Mbit/s到几百Mbit/s。相较于以上几种室内定位技术,UWB定位范围更大(大约100m),定位精度可达厘米级。除此之外,UWB定位具有较强的抗干扰能力和较低的功耗,在现实生活中具有更好的实用性。
本文针对室内实时精确定位的需求,设计了基于UWB的双向测距TOA定位系统。采用双向测距算法摒弃定位标签与定位基站时钟未同步带来的误差,提高测距精度,并结合TOA定位方法实现目标定位。该系统抗干扰能力强,定位精度高,适合用于工地、仓库、矿井、隧道等诸多室内环境中。
1 系统架构设计
基于TOA估计的UWB双向测距定位系统由定位基站、定位标签、交换机、服务器组成,其系统结构图如图1所示。
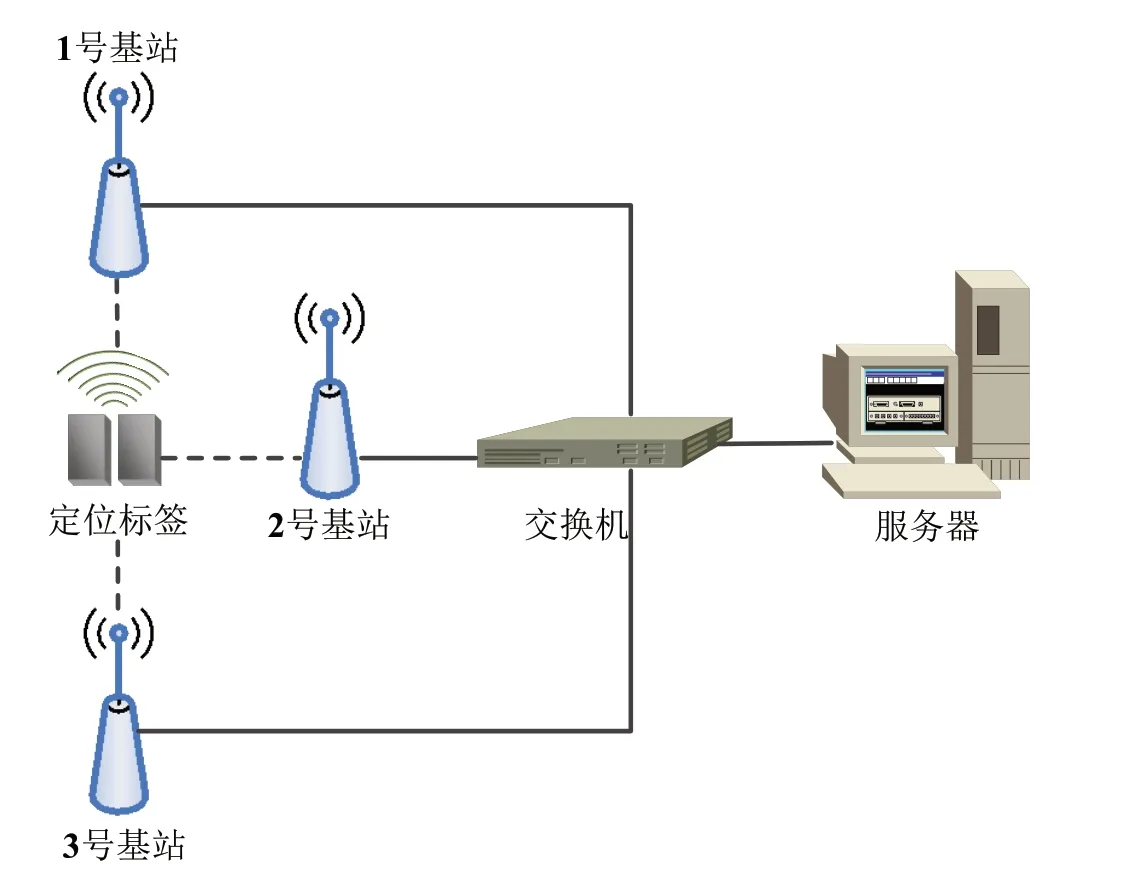
图1 系统结构图Fig.1 System structure diagram
在室内布置已知位置坐标的定位基站,待测人员携带用于定位的定位标签。定位标签按照规定的频率持续发射UWB信号,各定位基站接收信号后采用双向测距算法获得定位标签与基站的距离,并将距离信息通过交换机传送给服务器。服务器调用TOA定位算法建立方程组,求解出定位标签的位置坐标。
双向测距要求定位标签和定位基站均具备发射接收功能,既是信号发射器也是信号接收器。UWB信号发射器的工作原理如图2所示。首先将调制数据输入脉冲调制器,代码生成器根据调制方法对数据进行调制。然后将脉冲数据输入带有时钟振荡器的可编程延时单元,把每个数据放置在时间轴上的特定位置。根据数据的位置,脉冲发射器产生具有一定幅度的脉冲,最后发射天线将脉冲信号发送出去。
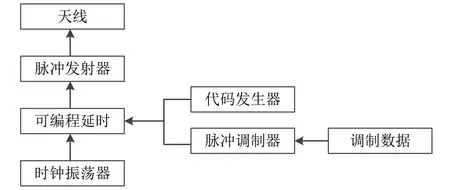
图2 UWB信号发射器工作原理图Fig.2 Working principle diagram of UWB signal transmitter
UWB信号接收器的工作原理如图3所示。为了使接收器和发射器保持帧同步,指令生成器生成一个波形,该波形通过模板生成器生成bit信号。同时接收天线接收UWB信号,当UWB信号和bit信号共同作用于脉冲相关器时,相关器会将接收信号输入到内部函数生成单个直流电压,该直流电压被送到脉冲解调器中,输出最终的解调数据。
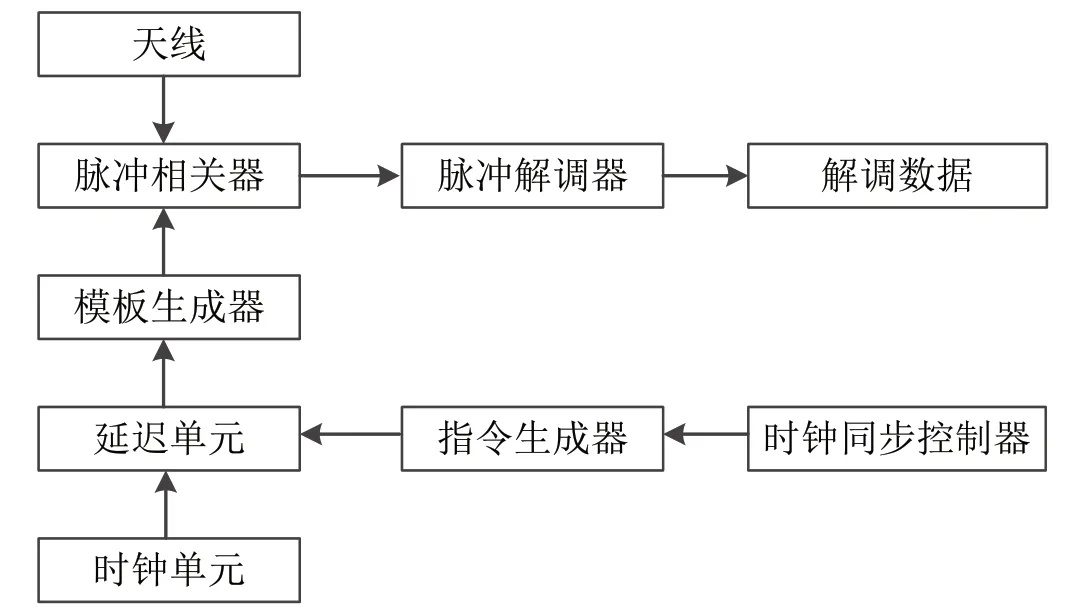
图3 UWB信号接收器工作原理图Fig.3 Working principle diagram of UWB signal receiver
2 UWB技术
UWB是一种无载波通信技术,其信号采用纳秒级窄脉冲进行短距离数据传播。UWB信号的通信频率为3.1GHz~10.6GHz,绝对带宽不小于500MHz,相对带宽不小于0.2,其表达式如式(1)所示:

f
表示信号的中心频率,f
和f
分别为信号功率谱密度的峰值衰减10dB所对应的上限频率和下限频率。UWB系统结构简单,功耗低,成本低;信道容量大,传输速率快;多径分辨能力强,定位精度高;抗干扰能力强,安全性高。这些特点和优势使UWB技术具有很高的定位准确度和定位精度,逐渐发展为近年来室内定位技术中的主流技术。
3 双向测距算法
双向测距算法是在定位标签和定位基站没有精确时钟同步的情况下,利用收发节点的往返时间来估算这两个节点之间的距离。UWB定位系统中双向测距各节点具备双工通信能力,双向测距示意图如图4所示。
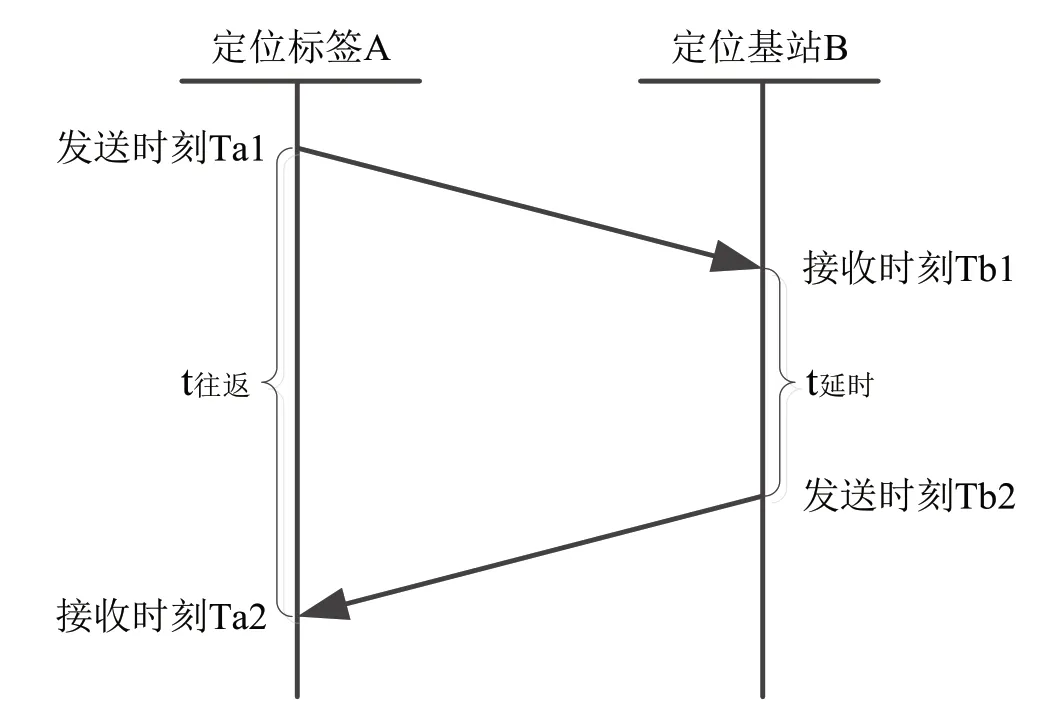
图4 双向测距示意图Fig.4 Schematic diagram of two-way ranging
定位标签A在Ta1时刻向定位基站B发送一个搭载时间标记的UWB无线电信息,当定位基站B收到信息时记下当前时刻Tb1。为了避免定位标签A接收冲突,定位基站B延时一定时隙t延时后,将回复信息、定位基站的接收信息时刻Tb1和信息发送时刻Tb2发送至定位标签A。定位标签在Ta2时刻收到定位基站发来的数据包,再根据数据包中的时间信息来计算信号的传播时延T。将T乘以电磁波传播速度c,即可得到定位标签A、定位基站B之间的距离D。
根据各自的本地时钟,定位标签A可以计算出UWB信号的往返时间t,如式(2)所示:

由于定位基站B延时t=Tb2-Tb1已知,定位标签A和定位基站B之间UWB信息的传输时间如式(3)所示:

则定位标签和定位基站之间的距离D由如式(4)所示:

双向测距能够屏蔽定位标签和定位基站之间时钟不同步带来的影响,提高测距精度。同时基于双向测距实现的定位系统的复杂度可以大大降低,具有更强的实用性。
4 TOA定位方法
基于TOA的定位方法即基于信号到达时间(Time Of Arrival)的定位方法,其原理是通过定位标签发出的信号到达定位基站的传播时间,来计算定位标签和定位基站之间的距离。二维空间下的TOA定位模型如图5所示。
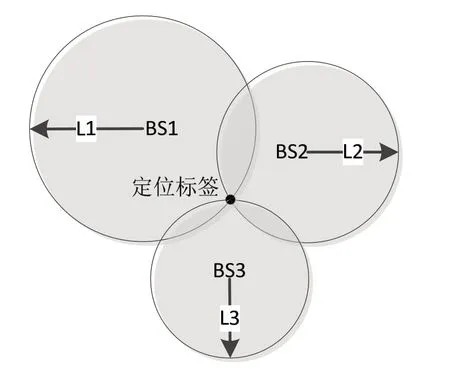
图5 TOA定位模型Fig.5 TOA positioning model
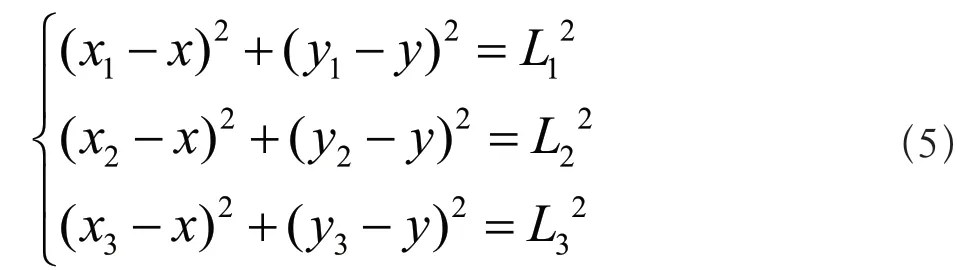
假设定位标签的坐标位置为(x,y),基站坐标位置为(xi,yi),其中(i=1,2,3)。Li(i=1,2,3)为定位标签与基站之间的距离,由双向测距算法获得。以每个基站为圆心,分别以各个距离为半径画圆,三个圆相交的点即为定位标签的位置。其定位方程组如式(5)所示:
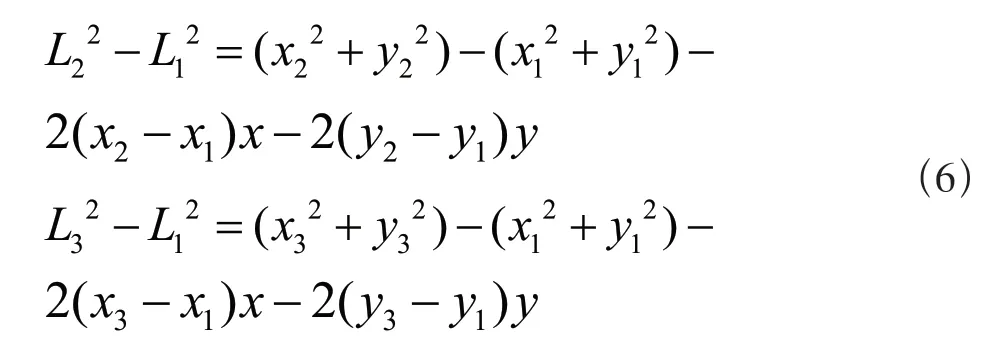
将方程组等式展开,分别减去第一项可得,如式(6)所示:
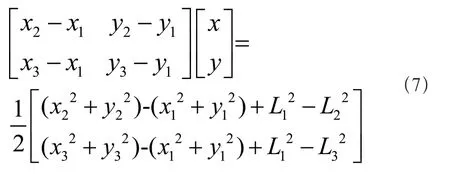
将上式转化为矩阵形式可以得到,如式(7)所示:
上式可以简化后如式(8)所示:

其中:
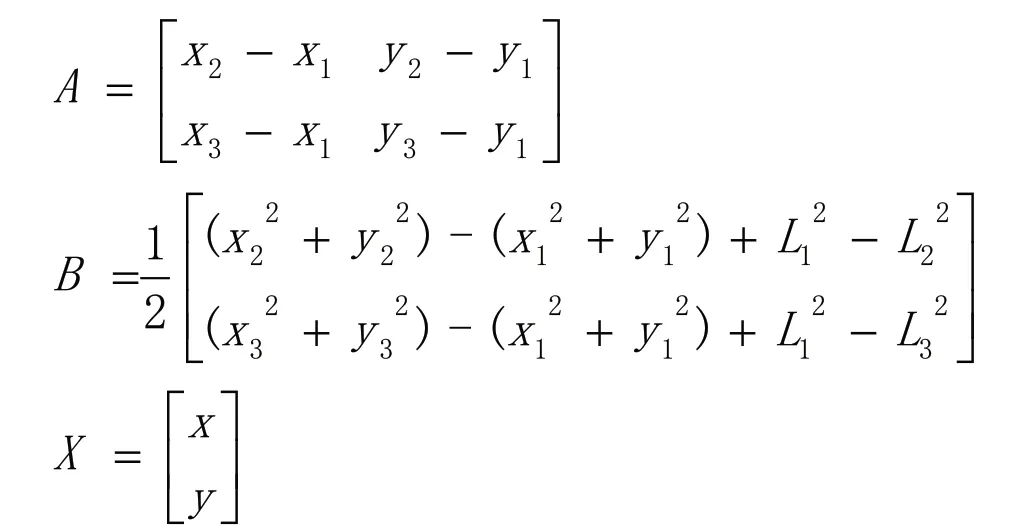
由此可以得到待测定位标签的位置坐标X,如式(9)所示:

5 结语
针对传统定位系统定位精度低、抗干扰能力差、抗多径效应差的问题,设计了一种基于UWB技术的室内定位系统。本文介绍了系统架构,描述了UWB技术,结合双向测距算法,采用TOA定位方法,无需定位标签和定位基站间的时间同步,实现了室内定位功能。该系统实现简单,可广泛应用于室内、隧道等复杂环境中。
