配电室智能巡检机器人系统分析与应用
2022-08-23鹤壁丰鹤发电有限责任公司陈志清
鹤壁丰鹤发电有限责任公司 陈志清
传统的配电室人工巡检方式存在耗时费力、实时性差的缺点,正在被智能巡检机器人替代。鹤壁丰鹤发电有限责任公司配电室采用轨道式智能巡检机器人实现配电室全天候、全方位、全自主智能巡检和监控,有效降低了劳动强度,提高了正常巡检作业和管理的自动化和智能化水平,为智慧电厂提供创新型的技术检测手段和全方位的安全保障。本文针对轨道式智能巡检机器人在鹤壁丰鹤发电有限责任公司配电室中的研究与应用情况,论述了系统架构、主要功能和设备状态识别技术等方面,该项目可在同类项目进行推广应用。
鹤壁丰鹤发电有限责任公司配电室长18m,宽7.5m,高6m,中间布置两排高低压成套配电柜,负责整个化学水车间所有设备的电源供电。为了减少运行人员日常劳动强度,提高工作质量和效率,保障配电室内安全运行,鹤壁丰鹤发电有限责任公司采用一台轨道式智能巡检机器人代替人工巡检,实现24小时不间断巡检。
1 系统架构
配电室轨道式智能巡检机器人系统主要由巡检机器人、轨道、无线充电基站、通讯网络和监控平台组成。
1.1 巡检机器人
轨道式巡检机器人是整个巡检系统的核心组成部分,机器人本体搭载360°双光云台、红外热像仪、超声传感器、气体传感器、环境监测等传感器。前端为带伸缩可见光摄像机,通过伸缩杆伸缩可见监测配电柜底部设备状态,后端为红外热像仪,可以检测配电柜设备温度信息,巡检机器人外型如图1所示。

图1 巡检机器人 Fig.1 Inspection Robot
1.2 轨道
机器人轨道采用工字型高强度铝合金型材,表面经阳极氧化处理,具备高抗腐蚀和较强的耐磨损性能。在配电室两排配电柜之间从屋顶吊装轨道,工字型轨道通过专用的吊装结构悬挂于配电室顶部。轨道现场图如图2所示。
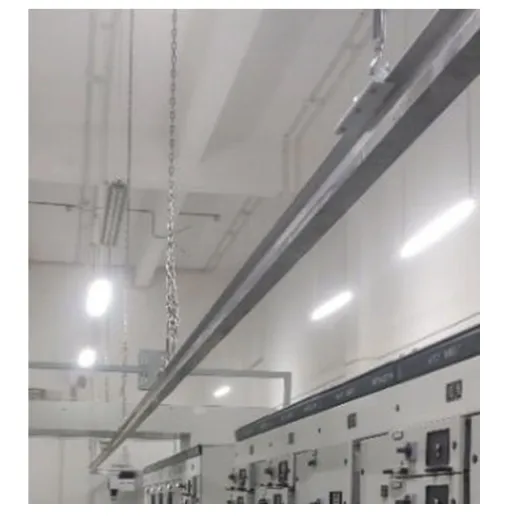
图2 轨道Fig.2 Track
1.3 无线充电基站
根据配电室布局在机器人轨道一端部署无线充电基站,机器人电量不足时自动进入基站进行无线电能补给。
1.4 通讯网络
在配电室部署无线通讯设备,机器人与基站之间通过无线网络通讯,在基站与后台监控平台敷设光缆,通过光缆与后台监控平台实时通讯。其组网拓扑图如图3所示。

图3 网络拓扑图Fig.3 Network topology diagram
1.5 监控平台
监控平台是机器人任务分配的可视化智能调度平台,主要完成机器人的集中监控、任务配置、数据分析和报警等功能。主要包含机器人管理模块、实时监控模块、任务管理模块、巡检结果确认模块、巡检结果分析模块、用户管理模块、系统调试维护模块和通讯接口模块。
2 主要功能及特点
配电室轨道式智能巡检机器人代替传统人工巡检的“看”“听”“嗅”“触”,对配电室设备、环境等进行不间断巡检。主要功能和特点如下:
2.1 主要功能
2.1.1 移动高清视频监控
轨道式巡检机器人安装360°连续转动球型云台,实现全方位巡检监控。搭载1080P高清可见光相机,实现配电室内实时移动视频监控。
2.1.2 设备状态识别功能
智能巡检机器人采用视觉导航技术和深度学习算法对现场典型设备进行学习。在实施过程中轨道机器人可自动移动到指定位置,控制云台自由转动,拍摄区域内各种表计设备照片,并将采集到的信息实时传输到主控后台服务器,系统自动根据图像信息,识别表计读数,并记录在数据库,当发现表计数据冲超过预设的报警值时,进行联动预警并反馈位置,运维人员第一时间进行抢修。
主要识别设备有:电压表、电流表等表计指示;开关柄、接地刀闸、贮能状态等机械位置及电气指示检测;状态指示灯自动识别;旋钮开关位置识别。设备状态识别图如图4所示。

图4 设备状态识别图Fig.4 Device status recognition diagram
2.1.3 红外测温检监测
智能巡检机器人搭载红外热成像仪,控制云台自由转动,拍摄配电室内各种设备红外热成像图谱。自动巡检过程中,自动发现温度超限节点和设备,依照行业规范对巡检设备进行温度检测,对缺陷或故障进行自动分析判断,并预警。
2.1.4 监测环境温度与湿度
轨道式机器人配备有先进的温湿度传感器,温度测温范围为-20℃~60℃,湿度测量范围为0~99%RH。机器人对配电室局部位置或全线的温湿度进行实时监测,生成温湿度变化趋势图,根据局部温湿度变化情况进行按需巡检。
2.1.5 自动巡检功能
轨道式机器人提供多种方式的自动巡检计划和方案,实现完全自动化运行,实现每天多次的对设备工作状态的巡检、自动预警、自动输出报表等功能,减少人员到现场巡视次数,提高运行人员工作效率,有效降低运行人员的工作强度。
2.1.6 可燃、有毒有害气体检测
智能巡检机器人搭载多种气体传感器,采用线性模拟电压输出,经DSP内置高精度ADC进行模拟/数字转换,实时监测气体浓度和烟雾,当浓度不在安全范围内时在本地和远程中心管理平台进行声光报警。
2.1.7 语音对讲及现场指挥功能
巡检机器人具有双向语音对讲功能,运行人员远程操作机器人监督现场人员操作及施工,是定期检修的有效工具。
2.2 主要特点
2.2.1 无线自主充电
轨道式机器人采用无线自主充电的供电方式,机器人自身带电量管理系统,根据设备电量阈值灵活自主进行电能补给,无需人为干预。
2.2.2 遥控功能
智能巡检机器人可以通过监控平台远程遥控巡检机器人,还可以通过配套的手持遥控器在就地对巡检机器人进行遥控,方便维护人员后期维护。
2.2.3 精确定位功能
智能巡检机器人在运动过程中通过伺服电机编码器进行精确定位,远程中心管理平台可以实时了解巡检机器人的位置信息。
3 主要技术
本系统在配电室设备状态识别上采用了视觉导航技术和深度学习算法相结合的技术,巡检机器人通过视觉导航定位设备,然后采集开关状态、指示灯等设备图像信息上传至服务器,通过服务器上建立的设备状态模型识别出设备状态信息。为了提高设备识别率,本系统搭建了基于Tensorflow平台的深度学习模型,通过不断采集现场数据进行训练迭代,得到最优模型。配电室设备状态自动识别步骤如图5所示。

图5 设备状态自动识别步骤Fig.5 Automatic identification steps of device status
3.1 获取各设备图像数据集并进行预处理
(1)采集配电房内设备运行状态、指示灯图像数据;
(2)利用标注工具Labelimg对图像数据中设备运行状态进行标注;例如:设备指示灯状态时,若指示灯亮灯则标注“light”,若指示灯灭灯则标注“dark”;
(3)对标注完成的数据按照检查错标、漏标数据、筛选重复数据等数据清洗的规则进行数据清洗,做为模型训练的数据集,并按照比例划分训练集与测试集。
3.2 设备状态模型的构建、训练、测试
(1)获取各设备图像的形状、颜色、尺寸和线条特征,构建模板图像,并根据模板图像特征分别进行训练建模;
(2)利用Cascade R-CNN算法,搭建设备状态分析模型,使用不同的IOU阈值,采用Cascade回归的采样机制,以上一步输出作为下一步输入,得到越来越高的IOU阈值,训练多个级联的检测器,从而提升识别精度,定位各待测图像内的目标区域;
(3)导入训练集数据进行训练,获得初始模型;
(4)利用测试集数据对初始模型进行测试。
3.3 模型的部署
将设备状态模型封装在应用容器引擎Docker中并一键启动,调用对应的设备状态模型接口即可实现相应的图像识别,并反馈测试结果。
3.4 获得最优模型
根据测试结果调整学习率Learningrate、Batch_size、Resize等,新的一版模型可以在上一版的基础上进行参数的调整,不断进行迭代优化调整模型参数,直至模型的识别准确率达到95%以上时,获得最优模型。
4 结语
配电室智能巡检系统以西安华控智能巡检机器人为核心,融合多种先进技术,既具有人工巡检的灵活性、智能性,同时也克服和弥补了人工巡检存在的一些缺陷和不足,更适应智慧电厂发展的实际需求,具有巨大的优越性,是智能巡检技术的发展方向,具有广阔的发展空间和应用前景。
