基于负载观测器与新型趋近律的光电稳定平台伺服系统RBF+SMC控制策略设计
2022-08-19李玉腾陈机林侯远龙戴宇辰
李玉腾,陈机林,侯远龙,刘 政,戴宇辰
(南京理工大学中法工程师学院,江苏 南京 210094)
车载光电稳定平台伺服系统,主要由稳定平台与光电探测设备构成,用于对目标物体进行探测、识别、捕捉、跟踪以及瞄准。光电稳定平台作为光电探测设备的支撑载体,其控制的精度直接关系到光电探测设备视轴的准确性,影响伺服系统的整体性能。而在实际工况中,稳定平台伺服系统会受到诸如内部摩擦力矩、外部路面扰动以及负载转矩与内部参数时变等非线性因素的影响。这些因素影响了稳定平台的控制精度,使平台上光电设备的视轴产生偏移,导致系统对目标跟踪的精度下降,产生误差,使得后续对目标打击的精度降低。因此,为了保证光电探测设备在车辆行进等实际工况下视轴稳定,对目标物体进行高精度追踪,从而进行高效精准的打击,有必要针对其支承载体——稳定平台伺服系统的控制算法进行有效设计。
在光电测量平台伺服系统中采用无刷直流力矩电机(Brushless DC Motors,BLDCM)作为驱动电机,以电机的输出轴配合齿轮箱带动稳定平台运动。而在实际的工作中,传统的PID控制方法无法克服电机中的非线性扰动因素,导致控制电机的鲁棒性较差。而滑模变结构控制(Sliding Mode Control,SMC)具有对扰动与参数不敏感,响应速度快等优点,其鲁棒性强,近年来广泛应用于各类控制算法中。本文主要基于滑模控制对系统的控制器进行有效设计,然而,传统的滑模控制在实际的开关控制中存在因不可避免的时间延迟以及空间滞后问题带来的高频抖震现象,会造成不必要的能量损失,导致系统的整体性能下降,因此,削弱滑模控制中控制器的输出抖震十分必要。针对这一问题,国内外众多学者提出了许多改进趋近率的滑模控制方法来减少其中的抖震,缩短系统的响应时间。本文使用一种改进的滑模趋近率对控制器进行设计,在系统误差快速收敛的同时,削弱控制器输出的抖震,进而提高系统的总体性能。
RBF神经网络具有很强的泛化能力,其网络结构简单,可以避免繁琐的计算,其可以在一个紧凑集与任意精度下,逼近任意的非线性函数。在控制器的设计中,可以利用此优点对系统未建模部分加以逼近补偿,将其与鲁棒性较强的SMC结合起来,以设计高精度的控制。并且,针对系统运行时的负载扰动,设计了负载观测器,用观测值替换原控制率中的高增益开关函数,以达到削弱控制器输出抖震的效果。仿真结果表明:该控制方法削弱了传统滑模控制中输出抖震的问题,加快了动态响应速度,提高了测量平台的位置控制精度,大幅度改善了系统性能。
1 光电稳定平台系统组成与数学模型
1.1 光电稳定平台伺服系统组成
光电稳定平台伺服系统内部结构主要由操作台、控制箱、D/A转换器、伺服放大器、齿轮箱减速器、减速器以及旋转编码器构成,如图1所示。

图1 稳定平台伺服系统结构
可通过全电式的伺服系统从水平与俯仰两个方向对稳定平台进行位置控制。将指定位置信号输入稳定平台水平与俯仰的控制箱中,使用D/A转换器将控制信号转化为数字信号,通过伺服放大器输送至PWM逆变器中以驱动交流伺服电机转动,再由电机输出轴配合减速箱带动稳定平台进行俯仰与水平的位置移动,最后,由旋转编码器检测当前稳定平台实时角度,反馈至控制器中,对稳定平台的位置误差进行实时调整。
1.2 光电稳定平台数学模型
本文主要研究的稳定平台为两轴稳定平台,分别为俯仰轴和水平轴。此处主要针对俯仰轴进行分析。由图1可以得到简化后稳定平台伺服系统的数学模型,如图2所示。

图2 稳定平台伺服系统数学模型
图中:为位置信号(角度),为控制率,为比例环节,为电机的电枢回路中的电阻,为电机的电枢回路中的电感,为电机的反电动势,为电机的电磁转矩系数,为电磁转矩,为负载转矩,为摩擦转矩,为折算到电机输出轴的转动惯量,为电机黏性摩擦系数,为电机角速度,为电机位置角度,为减速比,Δ为路面扰动产生的俯仰角度,为平台实际角度。
根据稳定平台系统的结构框图,可以计算出驱动电机的电磁转矩为

(1)
驱动电机的机械运动方程为

(2)
将式(1)代入式(2)可得

(3)
然而,在电机实际的工作过程中,机械的时间常数远远大于电流时间常数。因此,可以将电流响应的延迟时间忽略,即

(4)
因此,式(3)可以进一步简化为

(5)
车体在运动的过程中,会受到路面扰动的影响而产生小幅度振动,使得稳定平台在俯仰轴方向产生微小的偏移角度Δ,则引入路面扰动后的稳定平台伺服系统的数学方程改进为

(6)
其中,=+Δ。

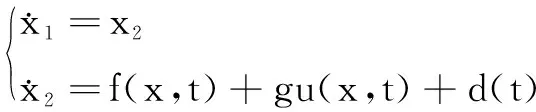
(7)

在实际的工作过程中,理想的位置信号为,则可跟踪误差可以定义为
=-
(8)
2 基于新型趋近率的RBF+SMC控制器设计
2.1 改进滑模控制器设计
为了提高滑模的动态性能,以进一步提高测量平台对目标物体的跟踪精度,设计滑模面为非线性积分型滑模面:

(9)
其中,、为大于零的常数;∈[-,0),记为
=-×exp(-e)
(10)
其中,与为大于零的可调参数。
在滑模的趋近运动中,为了保证趋近运动的动态质量,通常需要选择合适的趋近律。传统的趋近律存在抖震以及全局收敛速度缓慢的问题,因此,本次控制器设计使用了一种新型的滑模趋近律:

(11)
其中,0<<1,与为任意的正实数,()为非线性的函数,其表达式如下:

(12)
其中,为任意的正实数。
此趋近律由指数趋近项-()与幂次趋近项-||sgn()组成,指数趋近率||中的设计可以有效地限制滑模控制器输出量的变化幅值,引入幂次趋近项可以保证其在||≤时,系统在有限时间内到达滑模面,而且,指数趋近项的渐进特性与幂次趋近项的变速趋近特性可以有效地减少滑模控制的抖震问题。
由此,可以设计控制率为

(||+)sgn()+()]
(13)
2.2 RBF神经网络部分控制器设计
在平台伺服系统的实际工作中,无法得到系统时变非线性项(,)与的精确数学模型,使得控制精度受到影响。因此,本文利用RBF能对非线性函数任意精度逼近的特性,对控制率中的非线性项进行逼近,实现对系统的高精度控制。
RBF神经网络结构如图3所示。
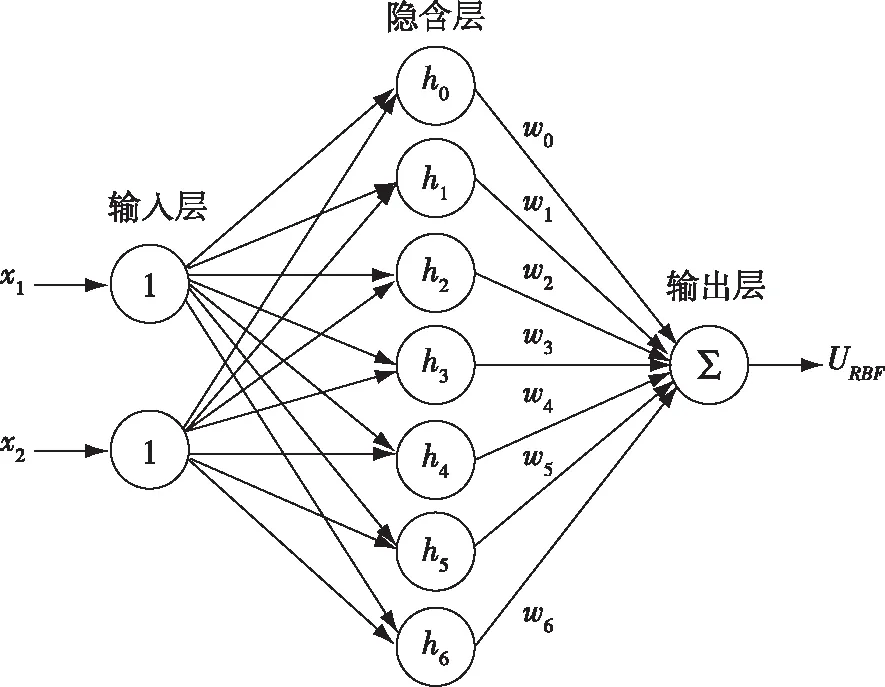
图3 RBF神经网络结构
本次神经网络结构采用三层框架,从左到右依次为输入层、隐藏层、输出层。其中,输入层有两个变量,隐藏层有7个神经元节点,输出层对神经网络运算结果进行输出。
1) 输入层:将系统的状态变量矩阵=[,]作为该神经网络的输入量。
2) 隐藏层:7个神经元节点=[,…]以高斯函数为基函数进行计算。
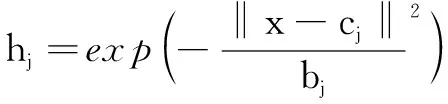
(14)
其中,为网络隐藏层的顺序,是基函数的宽度,是基函数的中心。
3) 输出层:输出RBF算法的逼近结果,其使用权值向量=[,,…,]与隐藏层连接。则逼近的非线性项(,)与可以表达为:
(,)=()+
(15)
=()+
(16)
其中,与为理想的权值矩阵,与为神经网络的逼近误差,()与()为其高斯基函数。
针对理想的权值矩阵未知,无法直接进行设计计算的问题,可以在对系统进行稳定性分析时,寻找其自适应率。


(17)

(18)


(19)

(20)
将式(17)、(18)代入原滑模控制率式(13),再代入式(11),经化简可得

(21)
设计Lyapunov函数为

(22)
其中,、为大于零的常数。
对式(22)求导,并代入式(15)与式(16)可得

(--(||+)sgn()--())
(23)
则可以设计自适应率为

(24)

(25)
则

(26)


(||+)sgn()+()]
(27)
3 负载观测器设计
虽然利用改进的趋近律对滑动模态的抖动有少许的抑制,但是利用较大的开关增益克服系统中的外部扰动,仍会使其在滑动模态中有较强的抖震。因此,可以考虑使用负载观测器对负载转矩进行观测,使用观测值代替控制率中的开关增益,达到进一步削弱控制器输出抖震的目的。
选取的状态变量为=[,],输入变量为,输出变量为=。则状态方程建立如下:
(28)
则可构建系统的状态观测器方程为:

(29)
通过式(29)、(28)相减得到观测器的误差方程:
(30)
其中,

可以得到负载观测器的状态方程为

(31)
设负载观测器系统的期望极点分别为与,则可以得到方程:

(32)
由此可以解出与的值分别为:

(33)
由式(29)、(33)可以得到设计的负载状态观测系统为
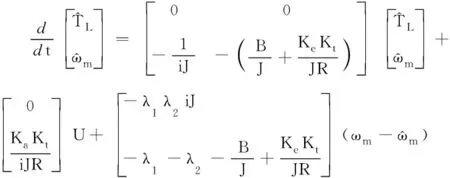
(34)
经负载观测器改进后的控制率为

(35)

控制器结构如图4所示。

图4 基于负载观测器的RBFSMC控制器
4 MATLAB/SIMULINK验证仿真
为了证明改进后的RBFSMC控制器的可行性,并与原未改进RBFSMC控制器进行比较,本文使用MATLAB/SIMULINK进行系统模拟。仿真所需的部分主要参数值如表1所示。

表1 仿真部分主要参数
输入信号为=30sin(),幅值为30°,周期为2s,仿真时长为20 s,其跟踪曲线如图5所示。

图5 正弦信号跟踪曲线
两种方法的追踪误差如图6所示。
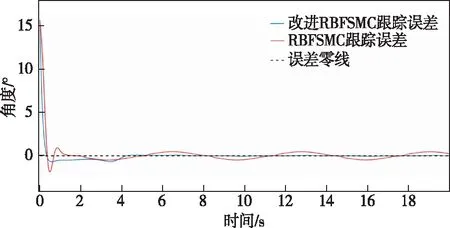
图6 正弦跟踪误差曲线
可以看出,两种控制方法均未产生过大的超调,但是从图5可以看出,基于改进后的RBFSMC系统的响应时间明显比基于传统RBFSMC少0.3 s(虽然在未进入稳态误差的0.5~2 s时,跟踪误差略大于改进前的控制系统)。但在进入系统稳态误差后,改进系统误差明显小于未改进系统,且误差控制在±0.01°,系统的控制精度有明显的提高。而未改进的控制系统追踪误差接近±0.15°,明显无法满足光电车载稳定平台的精度需求。设定目标位置为30°,仿真时间取20 s,阶跃响应如图7所示。

图7 阶跃响应跟踪曲线
由图7可知,虽然改进后系统稳态误差的时间较改进前稍长,但是系统超调量明显减少,二者的控制精度都较高。在对阶跃响应追踪时,两者的性能相近,精度能够到达±0.01°。
给系统添加持续的幅值为1°、1 Hz的正弦扰动来模拟路面扰动,其经过路面扰动的阶跃响应曲线如图8所示。

图8 负载扰动阶跃追踪曲线
可以看出,基于未改进RBFSMC系统的超调量较大,且进入稳态后总有±1°的误差,而基于改进的RBFSMC的系统超调量小,且进入稳态后,误差保持在±0.05°。改进后系统的抗干扰性较强,系统产生的偏移量更小,对目标有更高精度的追踪。因此,改进后的控制系统有更好的抗干扰性。
此外,控制器的输出如图9所示。从图9可以看出,改进后的系统控制量输出曲线抖震幅度在±2 V,小于未改进系统控制器的输出抖震±3 V,达到了预期目的。

图9 阶跃追踪控制器输出
5 结束语
本文针对提高光电稳定平台伺服系统的控制精度与抗干扰性问题,对RBFSMC控制算法进行改进,提出了基于负载观测器与改进趋近律的RBFSMC,经过试验证明其相对于改进前的控制方法,可以有效地提高稳定平台伺服系统控制精度,增强抗扰动能力,达到了良好的效果。
