煤矿井下智能机车运输系统改造设想
2022-08-18张星波
张星波
(山西华阳集团新能股份有限公司一矿,山西 阳泉 045008)
煤矿井下机车运输系统承担着煤炭生产人员、设备及物料的传送工作,对运输系统进行集装化管理,可以有效避免发生撞车、 脱轨等安全事故,提高煤炭生产的安全性。 因此,设计了一套以PLC为核心,使用车辆监控、物料运输和实时调度的“信号集中闭塞”的智能机车运输系统[1]。
1 煤矿井下机车运输系统现状及改造设想
矿井机车运输系统一般采用编码方式进行运输,对矿车已进行编码,但未实现集装化管理。 其车辆未实现精准定位和自动化控制,无法了解到车辆的具体位置,行进方向,行进速度等相关信息,给机车调度造成一定困难。 现有调车站门口缺少调车信息显示,机车运输调度系统主要采用人工调度指挥方式,地面无法实时了解机车运输情况,无法实现远程调度、智能调度和智能管控。
采用基于PLC的“信集闭”煤矿井下智能机车运输系统改进后的机车牵引系统,由控制装置、变频器、通信系统以及速度及位置传感器等组成,以可编程控制器(PLC)为核心,配以专业化人机界面,具备画面监控、速度实时测量、紧急状态制动、无极绳过卷过放、 过速、 欠速等保护运行状态功能,对于车辆状态具有岔路语音提示,道路边沿语音通信等功能,与电控开关配合使用,实现机车自动化控制,同时具有打点、通话、急停等功能[2]。
2 智能机车运输系统方案
在地面数据中心部署智能机车运输系统,建设一套机车运输管理系统,可以实时监控车辆状态,实时查询车辆当前位置,对整个运输过程进行监控,解决运输部门找车难的问题,同时也可以共享车辆运输所有信息,让使用部门能够实时了解运输情况,统一安排工作,提高工作效率[3]。结合井下LED显示屏,实现重要通知的同步显示;系统接入红绿灯,实现对红绿灯的管理和控制。 通过运输设备的实时监控,实现车辆的有序控制和运输过程的智能管控。 同时,实时监控数据及视频画面通过工业环网接入矿井智能综合管控平台,实现地面远程监控和智能调度。
3 智能机车运输系统设计
3.1 系统架构
矿用机车管理系统在地面设置控制中心,在井下车辆跟踪区域和巷道中放置一定数量的矿用通信基站,井上、井下之间通过工业环网相连接。智能运输系统结构组成如图1 所示。
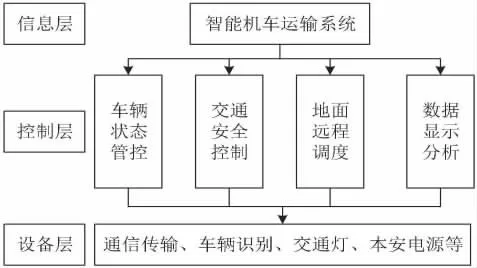
图1 智能运输系统结构组成
车载分站实时读取轨道上的标示卡信息,通过无线WiFi发送到巷道内的矿用无线基站,上传位置、速度信息至上位机,实现车辆的定位、测速,以及红绿灯的闭锁控制。 地面的数据中心通过信息识别卡的数据存储分析,确定车辆的运行区间,判断车辆是否闯红灯、是否超速。 通过后台的数据库录入,也可以实现对车辆的信息管理、车辆使用情况统计等[4]。
3.2 系统组成
智能运输系统架构如图2 所示,主要由三个子系统组成。
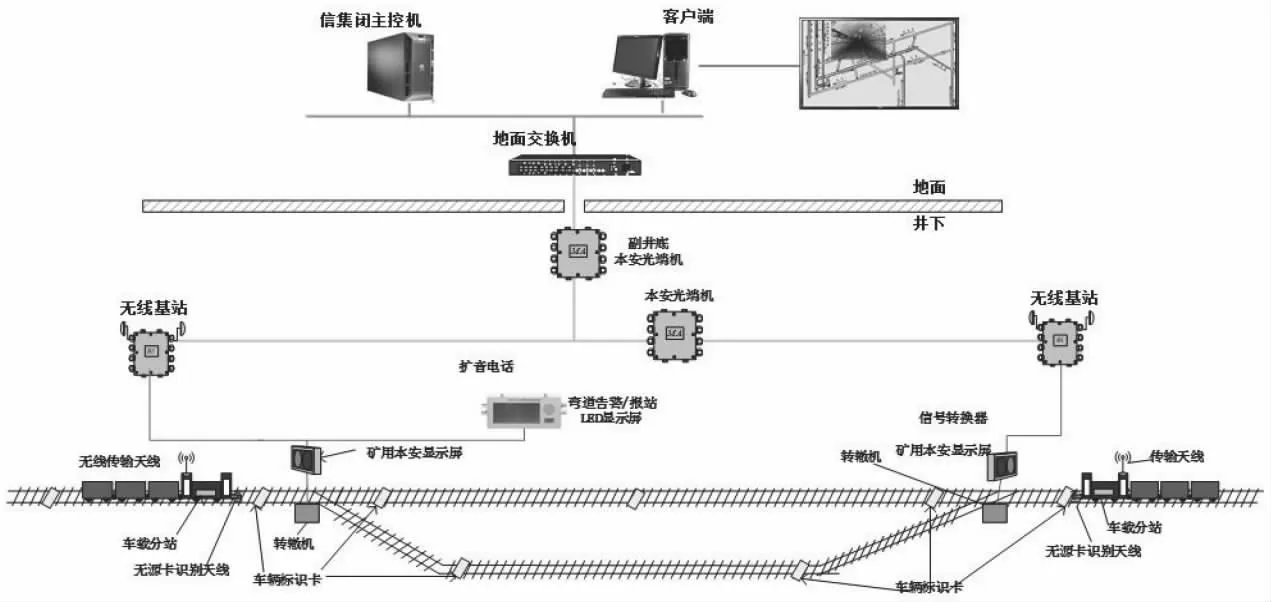
图2 智能运输系统架构
(1)车辆状态监控子系统。 采用本安无线基站设计,矿井轨道运输大巷实现WiFi信号覆盖,根据矿井辅助运输巷道情况,矿用本安型无线基站,在巷道拐弯及起伏的位置适当缩短基站之间的距离,实现对车场和主要轨道运输巷道的覆盖。对于机车通信设计系统,运输调度室配置IP语音交换机1台,实现巷道内本安无线基站的管理和本安手机通信之间的管理,配置矿用本安通讯信号器,实现和调度交换机之间进行连接,实现和调度通信之间的互联互通。 车载分站设计,每台电机车车头配置车载分站1 台,实现机车在运输巷道内的定位[5]。
(2)交通安全控制子系统。 对于信号灯设计,矿井副立井井底设置相应数量的红绿灯,实现道岔位置的指示和电机车的有序通行。 运输巷道岔路口、采区顺槽口设置相应数量的红绿灯,红绿灯按照规则进行显示,通过CAN总线接入巷道的定位基站,在地面服务器上可显示红绿灯的状态,井下车场调度室监控计算机也可通过软件控制红绿灯显示[6]。
(3)地面远程调度子系统。 对于主运输调度中心设计,在运输队配置机车运输系统管理服务器2台,主机和备机可实现自动切换,以保证系统的可靠稳定运行,实现机车运输系统的管理和数据分析汇总。 同时,在运输科配备1 台电脑,用于远程查看和监控机车运输系统的工作状态。 在运输队监控室配置液晶屏,实现矿用机车运输管理系统的动态模拟显示,便于主运输调度人员实时查看和管理[7]。

图3 智能运输领料功能组成
3.3 系统关键功能
除运输过程外,物资材料领用也是运输过程中的重要部分,通过系统软件对所需物料发起申请,待审核通过后,可开始装车并按使用时间运达井下指定位置。 审批人在审核的同时需分配合理的机车数量以确保后续运输任务的进行。 系统通过GIS图页面,对当前井下运送中的车辆进行当前时间点下的位置展示。 该系统还可对数据实现增、删、改操作,实现车辆类型信息的管理功能,具体功能有:运单超时告警、卸货超时告警、井口检查信息、物料申请报表生成及统计、人员配置中心管理、车辆到站提醒功能、车辆调度功能。 车辆调度管理功能包含用车管理、派车管理、还车管理等[8]。
4 软件系统设计
在智能机车运输系统中,车辆交通状况判断、物料管理和车辆调度同等重要,因此设计现场车辆调度流程,如图4 所示。
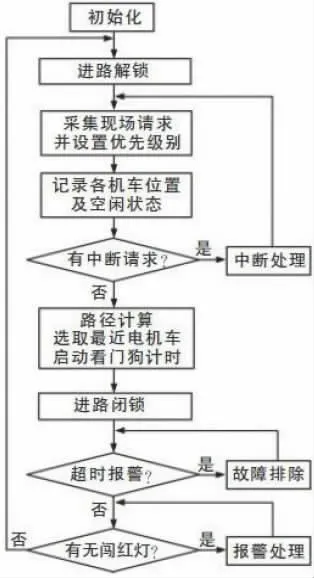
图4 调度控制流程
首先系统对调度业务进行初始化和进路解锁,确保道路安全可行,随后采集现场车辆运输请求并根据主次设置优先级别,同时完成车辆位置及空闲状态的登记。 当系统中有意外发生时,进入中断处理程序,否则车辆正常行驶,并计算出最近的道路,并将所选道路闭锁,确保运输安全。 在运输过程中发现运输超时或闯红灯时,则判定为故障或进行报警处置,若无上述情况发生,则继续进行运输,并完成下一路段的解锁及闭锁工作,直至顺利实现运输。
5 结语
随着煤炭生产机械化水平和自动化水平的提高,人们对安全生产也提出更高的要求。 在现有基础上融合PLC技术开展的煤矿井下智能机车运输系统,通过对人、车、料的综合控制,并加强交通运行环境的监控和车辆的实时配置,进一步提高管理水平。为提高机车运行安全性,提高煤炭生产效率,实现煤炭行业的数字化和现代化具有重要意义。
下一步,将对新设计的煤矿井下智能机车运输系统应用于某煤矿北翼轨道运输大巷,西大巷轨道运输大巷,以检验系统实用性能,并进行优化。
