基于移动机载平台的输电线绝缘子激光除冰机构设计
2022-08-18叶高呈邹德华邝江华
叶高呈,邹德华,邝江华,江 维*
基于移动机载平台的输电线绝缘子激光除冰机构设计
叶高呈1,邹德华2,邝江华2,江 维*1
(1. 武汉纺织大学 机械工程与自动化学院,湖北 武汉 430200;2. 国网湖南省电力有限公司 超高压输电公司,湖南 衡阳 420100)
为了解决冬季严寒时期对输电线路及其金具的除冰作业任务,综合分析现有的除冰技术,本文提出一种基于激光技术的新型输电线路除冰方法,设计了能够在地面行走并搭载激光除冰器的激光除冰装备的基本构型和虚拟样机模型,通过合理的作业运动规划,利用激光头的旋转和俯仰运动对输电覆冰处定点激光照射使覆冰脱落,和常规除冰作业方式相比,该除冰装备移动平台采用四轮行走模式能够灵活移动,同时激光可以实现无接触式的除冰作业,再配合激光头的多自由度运动对覆冰处实现无盲区除冰,其作业效率和作业可靠性得到一定保证,该研究对于输电线路智能运维管理具有重要理论意义和实际应用价值。
机载平台;非接触式;激光除冰;多自由度运动;无盲区作业
0 引言
高压输电线路通过架空形式跨越原始森林、大江大河,冬季严寒气候造成输电线路及线路上悬垂绝缘子串上产生覆冰,悬垂绝缘子串[1-4]上的覆冰主要包括盘面的覆冰和绝缘子串上绝缘子和绝缘子之间形成的冰凌[5-8],这些覆冰和冰凌不仅仅增加了整个输电线路杆塔的负重,更重要的是会影响绝缘子的绝缘性能,特别是绝缘子和绝缘子间的冰凌最容易造成绝缘子片间短路事故的发生[9-10],因此,去除容易造成短路事故的绝缘子冰凌是保障整个输电线路安全稳定运行的关键。
目前国内外针对输电线路除冰技术已有多种不同方法,但是主要可以归纳为3类,即热力融冰法[11-12]、机械破冰法[13-14]、其他除冰法[15-16]等。第一种方法,热力融冰法的缺点就是在融冰过程中需要断电,难以实现带电除冰作业,这样会造成巨大的经济损失,但其优点就在于对除冰技术人员不需要过高的知识和技能要求,只需要进行简单的培训即可操作设备进行融冰作业,如国家电网[17-18]、南方电网[19-20]及其它研究单位都提出了许多直流热力融冰技术方案及其实际应用;第二种方法,机械除冰其优点和第一种一样,不需要进行专门的除冰知识和设备操作培训,还有就是耗能小,价格便宜。但其主要缺点是操作人员需要近距离的进行除冰作业,脱落的冰块以及带电的输电导线对操作人员的人身安全有极大的威胁。除此之外,其它的一些除冰方法大多都有除冰效率低、安全隐患大、设备花费高昂等缺点[21-22]。
基于上述分析,综合几种输电线路除冰作业的优缺点,本文提出了一种利用激光新技术的输电线路除冰方法,通过移动机载平台搭载输电线激光除冰设备来进行除冰作业,机载移动平台可以实现各个方向灵活运动,同时,搭载的激光装备具有俯仰和旋转两个自由度的关节运动,可以实现输电线路绝缘子串覆冰作业范围的无死角覆盖,激光除冰装备发射激光到达覆冰处,覆冰吸收激光能量,温度升高,最后使冰层融化脱落,激光除冰技术是激光技术与电网系统作业需求的深度融合和新尝试,具有除冰方向性强、能量定向传输效率高、采用非接触式等显著特征,其对于输电线路安全、稳定、智能运维管理具有重要理论意义和实际应用价值。
1 除冰对象绝缘子及其作业环境分析
如图1所示为输电线路除冰作业环境示意图,其主要包括电线杆塔、电线、绝缘子串、电线配件、拉线、电线塔基础、接地装置等组成,架设于地面上。其中绝缘子串是带有固定和运行需要的输电线路保护装置,用于悬挂导线并使导线与杆塔和大地绝缘的作用。有关研究结果表明,绝缘子串覆冰越重、电压分布畸变越大,特别是高压电线上的绝缘子串承受电压百分数越高,越容易造成冰闪事故。另外,从物理性能分析,当绝缘子的覆冰超过额定载荷的限度时,会使绝缘子摔毁。而当悬垂绝缘子的覆冰不均时,会造成绝缘子向一侧大幅度倾斜而碰到杆塔,使绝缘子损坏,这些后果严重影响着电力系统的安全稳定运行,输电线路激光除冰作业通过移动机载平台搭载激光装备在输电杆塔附件开展作业,主要是通过机载平台的运动和激光装备的多自由度协调运动,控制激光头实现除冰区域的无盲区扫射,从而实现整个输电线路的除冰作业。
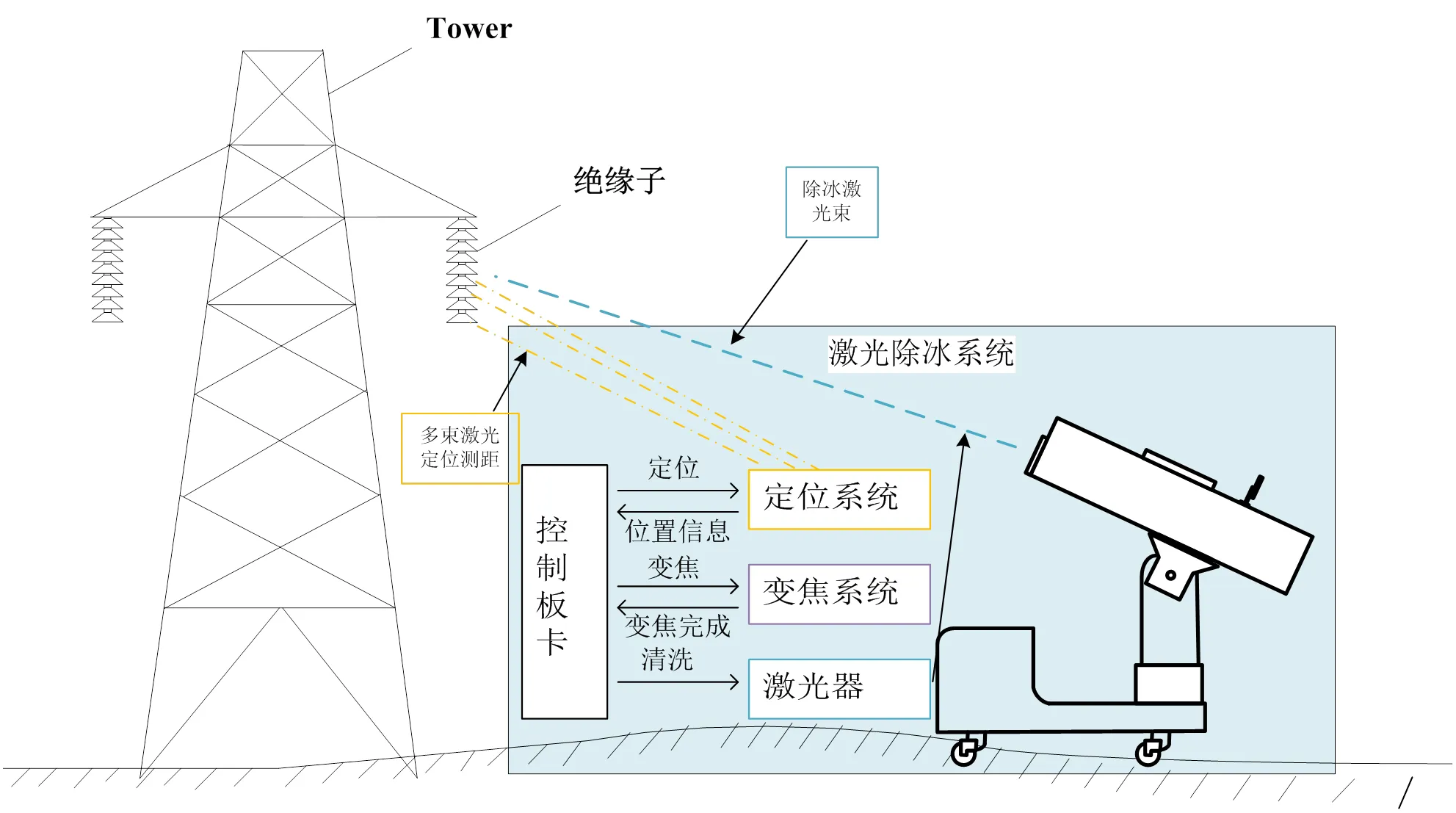
图1 绝缘子串除冰作业环境示意图
2 基于机载平台的激光除冰机构系统设计
2.1 激光除冰机构构型设计
激光除冰装备包括激光器和移动平台两大部分,激光器上搭载瞄准装置和显示屏,使其对覆冰处更精确定位,激光器结构如图2(a)所示。移动平台包括移动柜体、转台和四个行走轮,激光装备机械部分包括旋转和俯仰两个自由度对激光头的方向进行调整,通过转台旋转和激光器绕着转台俯仰运动,其中最大角度视实际情况及工作需要决定,再通过移动柜体下的四个行走轮实现整体的位姿调整,从而实现激光器发射的激光扫描既定的除冰区域,完整的激光除冰装备二维结构简图如图2(b)所示。
2.2 激光除冰实体模型与虚拟样机设计
基于上述激光除冰装备的基本构型图,输电线路绝缘子串激光新型除冰系统装备实体模型图如图3(a)所示,其中激光部件包括激光头、频率转换装置、准直镜、扫描振镜、聚焦镜等如图3(b)所示,瞄准装置和显示屏固定于激光器上,其实体结构主要包括瞄准装置、激光部件、移动柜体、转台、显示屏等几个主要部分。采用激光频率转换技术和振镜扫描聚焦原理,通过激光头输出红外激光,经过准直镜和扫描振镜还有聚焦镜照射到绝缘子串覆冰处。机载移动平台柜体内具有电源系统、控制设备、冷却设备等如图4所示,电源系统给激光头供电,冷却设备与激光头连接。控制设备与激光电源和扫描振镜的电源的外部控制端口连接,转台包括方位旋转部件如图5(a)所示和俯仰部件如图5(b)所示,可通过控制转台进行方位旋转和俯仰两自由度的转动,瞄准装置通过电子望远镜将图像信息传送给控制系统,并在显示屏上显示,对可见激光照射的位置进行观察,避免激光对绝缘子串的损伤。
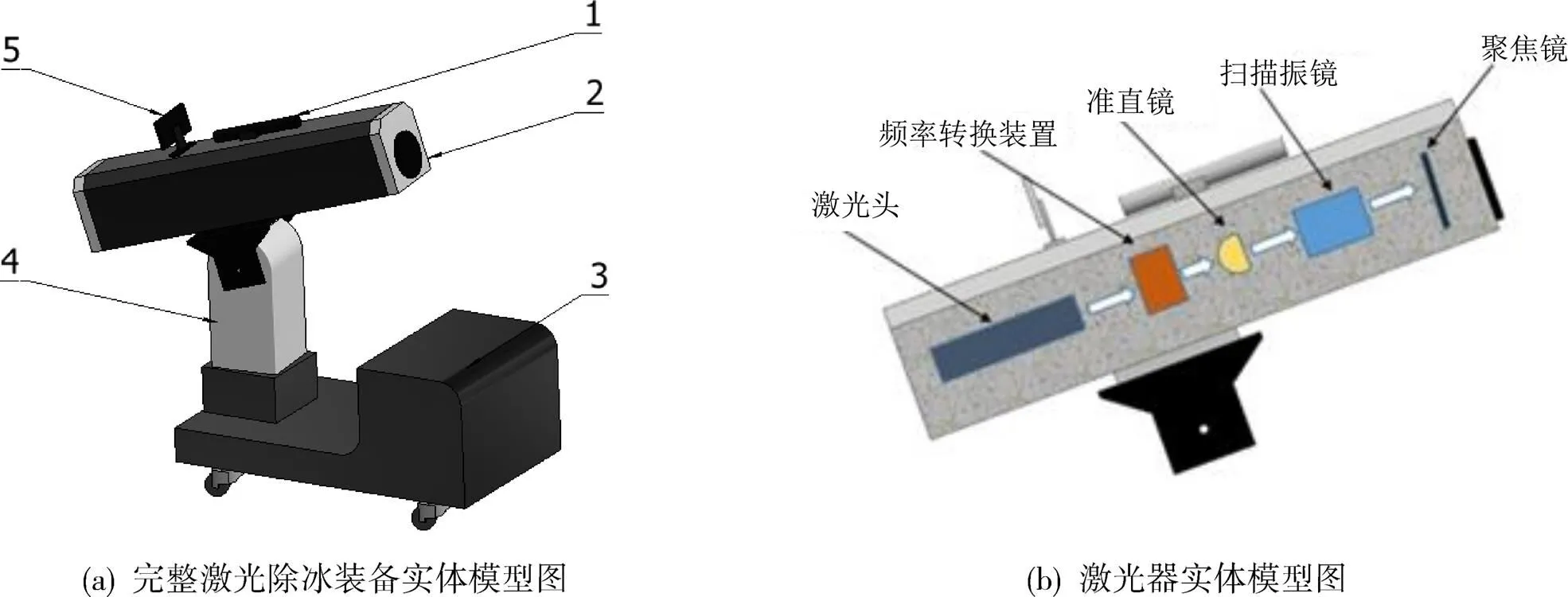
图3 激光除冰系统的三维实体模型图
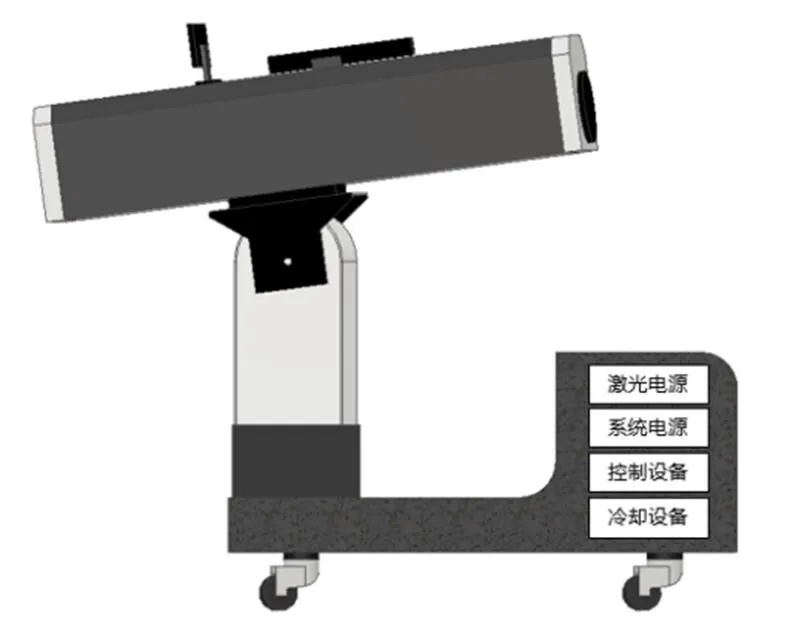
图4 移动柜体内部示意图
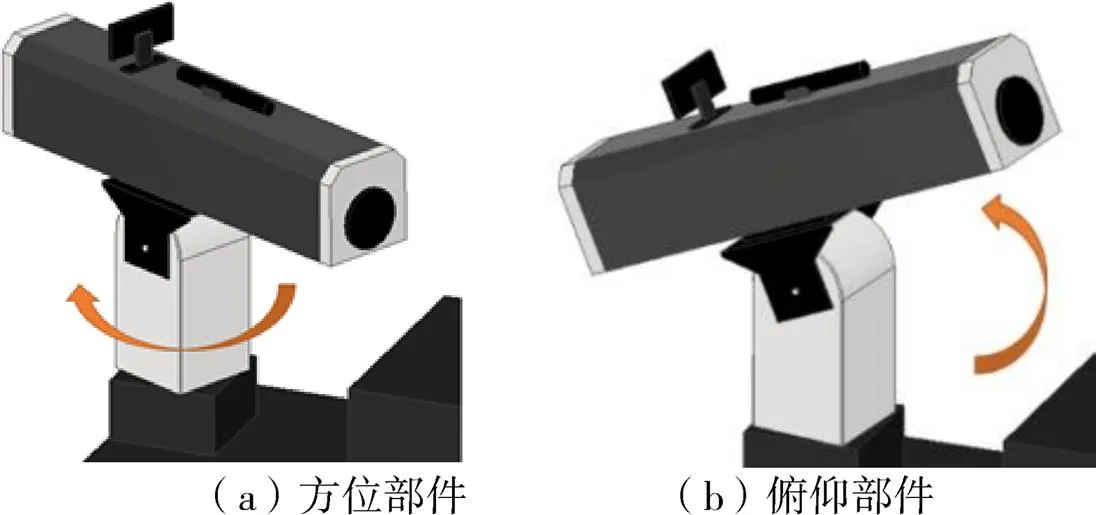
图5 激光除冰装备机转台
3 基于机载平台的激光绝缘子除冰作业运动规划
当进行高空中绝缘子串除冰作业时,通过移动平台搭载激光除冰机移动至合适位置,作业前,激光除冰机初始工作状态如图6(a)所示。通过控制系统调整至合适激光俯仰角度,使得激光可以远距离传输到绝缘子串上,再通过瞄准装置精准对着绝缘子串上的覆冰如图6(b)所示,同时,应保证扫描振镜、聚焦镜、激光头等同光轴。当进行绝缘子串顶部绝缘子除冰时,可通过控制系统进行位姿的调整如图6(c),6(d)所示,激光束在水平面扫描运动,使得绝缘子上覆冰充分融化。通过移动平台和旋转机构实现一个绝缘子盘面覆冰的清除,然后通过俯仰机构,对准下一片绝缘子,并通过移动机载平台和激光器的关节运动重复上述过程实现整串绝缘子覆冰的清除作业。
4 激光扫射除冰作业空间测试与分析
为进一步验证激光除冰机器人机构构型在绝缘子覆冰清除作业中的可行性和有效性,通过调节激光装备上的两个运动自由度的偏转角α、β来测试激光束在绝缘子串上扫描的作业空间范围,以本文作业运动规划中垂直形态下的5片悬垂绝缘子构成的1个绝缘子串来进行激光扫描作业运动空间范围测试,规定俯仰运动向上俯仰角α为正,左右运动向左偏转,偏转角β为正,初始位置为两个偏转角都为0,且激光头正对绝缘子串第3片中心位置,所得到的测试结果如表1所示。
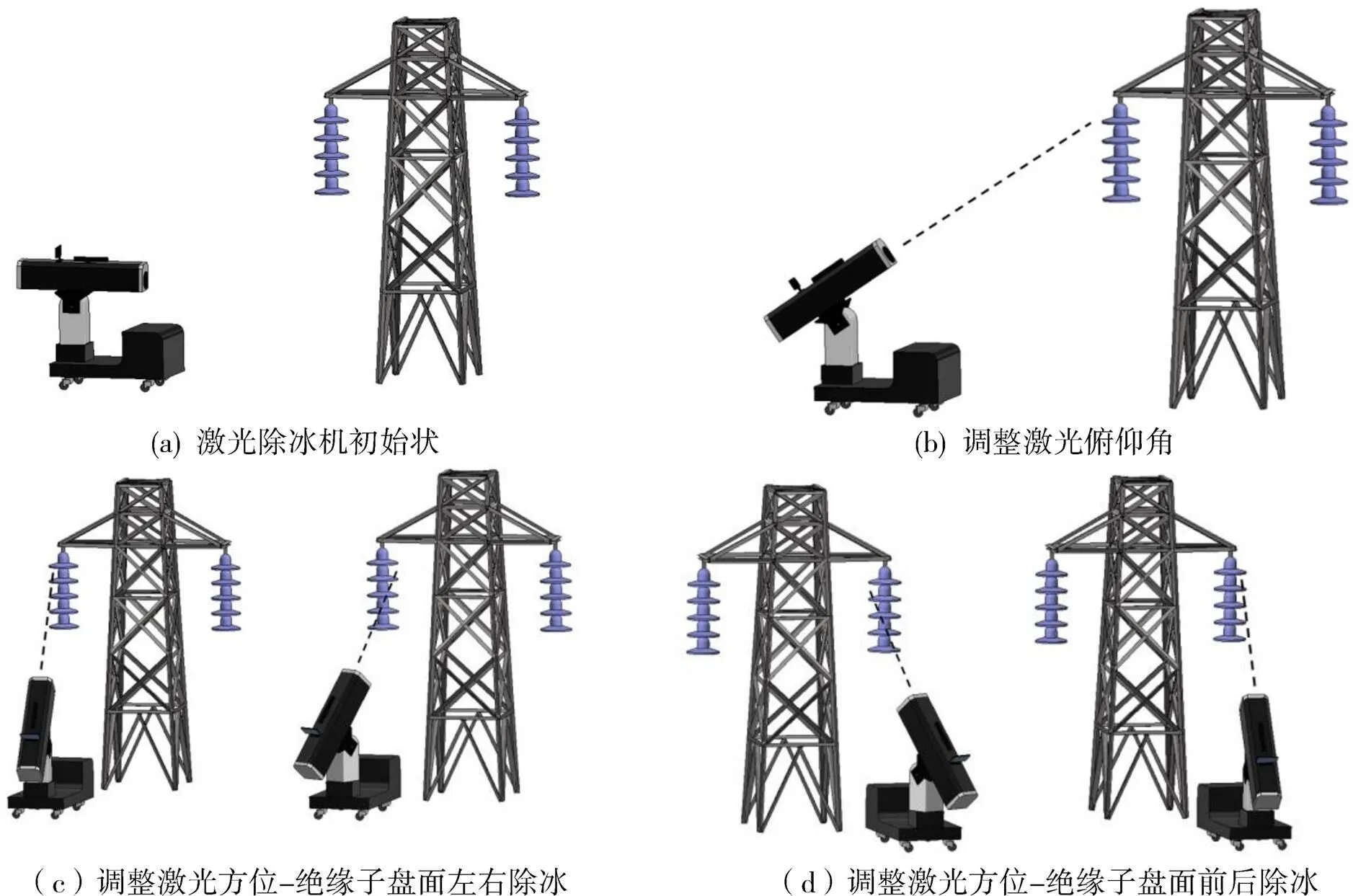
图6 绝缘子串激光除冰装备作业运动规划

表1 激光扫射范围测试结果
通过表1的测试结果可知,在激光装备构型设计时,2自由度的激光运动关节控制系统其偏转角分别在45度到-45度之间和60度到-60度之间,激光器在运动过程中不会与激光装备自身及机载平台之间发生运动干涉,且通过偏转角的调节可以实现一串绝缘子的上下扫描和一片绝缘子的左右扫描,因此,机械设计上通过设置该偏转角及其运动控制,激光除冰机器人能够实现超高压输电线路悬垂绝缘子的无盲区除冰作业。
5 结论与展望
本文针对输电线路非接触式除冰作业,提出了一种基于移动机载平台的输电线绝缘子激光除冰装备的基本构型,设计了相应的三维实体模型图,提出了适用于输电线路悬垂绝缘子串的激光新型除冰作业运动规划及除冰作业方法。提出了移动平台-激光头复合系统的嵌入式集成控制体系架构,通过这种复合模式能够大大增加激光扫射的范围以及增加激光头运动的灵活性和可靠性从而实现输电线路绝缘子串无盲区除冰作业,实现了激光技术在电力系统中的创新应用,同时本文所提出的激光除冰系统新构型和除冰新方法还需要在实际物理系统中做进一步的实验以验证其工程实用性。
[1] Pouliot N, Richard P L, Montambault S. LineScout Technology Opens the Way to Robotic Inspection and Maintenance of High-Voltage Power Lines [J]. IEEE Power & Energy Technology Systems Journal, 2015, 2(1):1-11.
[2] Lima E J, Bomfim M H S, Mourão M A M. POLIBOT–Power Lines Inspection Robot [J]. Industrial Robot: An International Journal, 2018, 45(1): 98-109.
[3] Wang W, Wu G, Bai Y, et al. Hand-Eye-Vision based Control for an Inspection Robot’s Autonomous Line Grasping[J]. Journal of Central South University, 2014,21(6): 2216-2227.
[4] Shruthi C M, Sudheer A P, Joy M L. Optimal crossing and control of mobile dual-arm robot through tension towers by using fuzzy and Newton barrier method[J]. Journal of the Brazilian Society of Mechanical Sciences and Engineering, 2019, 41(6): 245-270.
[5] Seok K H, Kim Y S. A state of the art of power transmission line maintenance robots [J]. Journal of Electrical Engineering & Technology, 2016, 11(5): 1412-1422.
[6] Alhassan A B, Zhang X, Shen H, et al. Power transmission line inspection robots: A review, trends and challenges for future research[J]. International Journal of Electrical Power & Energy Systems, 2020, 118: 105862.
[7] Sun C, He W, Hong J. Neural Network Control of a Flexible Robotic Manipulator Using the Lumped Spring-Mass Model [J]. IEEE Transactions on Systems Man & Cybernetics Systems, 2017, 47(8):1863-1874.
[8] Wang K, Luo M, Mei T, et al. Posture Error Correction of a Six-DOF Serial Manipulator Based on Genetic Algorithms [J]. Lecture Notes in Electrical Engineering, 2013, 226(5): 203-211.
[9] 巢亚锋, 岳一石, 王成, 等. 输电线路融冰、除冰技术研究综述[J]. 高压电器, 2016, 52(11):1-9+24.
[10] 庄红军, 杨永谦, 陈友坤, 等. 输电线路双向除冰机器人系统设计[J]. 自动化与仪器仪表, 2020, (10): 141- 144.
[11] 郝艳捧, 刘国特, 薛艺为, 等. 输电线路覆冰厚度的小波分析图像识别[J]. 高电压技术, 2014, 40(02): 368- 373.
[12] 张秉良, 张都清, 韩梁. 架空输电线路激光远程融冰试验及分析[J]. 山东电力技术, 2019, 46(01): 78-80.
[13] 梁显涛, 廖梓杰, 林俞先. 一种新型的高压线巡检除冰设备[J]. 广西农业机械化, 2020, (01): 39.
[14] 周维维, 樊卫华, 姜姗. 激光异物清除器装置研究[J]. 计算机测量与控制,2018,26(7):123-127.
[15] 张欢, 李炜, 张亚军, 等. 输电线路档距组合对覆冰导线动态特性的影响分析[J]. 高电压技术, 2013, 39(03): 755-761.
[16] 曹雷, 郭锐, 张峰. 高压输电线路除冰机器人机械本体结构的研究[J]. 机械设计与制造, 2013, (04): 147- 149+152.
[17] 魏书宁, 王耀南, 印峰, 等. 基于K-最近邻分类增强学习的除冰机器人抓线控制[J]. 控制理论与应用, 2012, 29(4): 470-476.
[18] 鲜开义, 彭志远, 谷湘煜, 等. 变电站巡检机器人避障方法研究与应用[J]. 科学技术与工程, 2021, 21(5): 1957-1962.
[19] 张建华, 许晓林, 刘璇, 等. 双臂协调机器人相对动力学建模木[J]. 机械工程学报, 2019, 55(3): 34-42.
[20] 马宏伟, 张珍珍, 杨林, 等. 巡检机器人全球定位系统/里程计组合定位方法[J]. 科学技术与工程, 2020, 20(23): 9440-9444.
[21] 李小彭, 尚东阳, 李凡杰,等. 输电线巡检机器人动力学建模与DME评价[J]. 东北大学学报(自然科学版), 2020, 41(9): 1280-1284.
[22] 魏永乐, 房立金, 等. 双臂巡检机器人沿输电线路行走特性分析[J]. 北京理工大学报, 2019, (8): 813-818.
Design of Laser Deicing Mechanism for Transmission Line Insulator based on Mobile Airborne Platform
YE Gao-cheng1, ZOU De-hua2, KUANG Jiang-hua2, JIANG Wei1
(1. School of Mechanical Engineering and Automation, Wuhan Textile University, Wuhan Hubei 430200, China; 2. State Grid Hunan EHV Transmission Company, Hengyang Hunan 420100, China)
In order to solve the deicing task of transmission lines and their fittings in the severe cold period of winter, based on a comprehensive analysis of the existing deicing technologies, this paper proposes a new deicing method for transmission lines based on laser technology, and designs the basic configuration and virtual prototype model of the laser deicing equipment which can walk on the ground and carry the laser deicer. Through the reasonable operation movement planning, the rotation and elevation motion of the laser head irradiates the fixed-point laser at the icing place of the transmission line to make the ice fall off, and the conventional deicing. Compared with the operation mode, the mobile platform of the deicing equipment adopts the four-wheel walking mode, which can move flexibly. At the same time, the laser can realize the non-contact deicing operation, and cooperate with the multi degree of freedom movement of the laser head to realize the ice free deicing at the icing area, and the operation efficiency and reliability are provided to a certain extent practical application value.
Airborne platform; contactless; laser deicing; multi degree of freedom motion; no blind area operation
TM411
A
2095-414X(2022)04-0033-05
通讯作者:江维(1983-),男,讲师,博士研究生,研究方向:电力作业机器人.
武汉纺织大学研究生创新基金资助项目(2022).