车辆跟驰模型的发展综述
2022-08-18王道意宇仁德闫兴奎胡婧晖朱燕华崔淑艳
王道意,宇仁德,闫兴奎,胡婧晖,朱燕华,崔淑艳
(山东理工大学 交通与车辆工程学院,山东 淄博 255049)
车辆跟驰模型研究一直以来就是交通流理论的热点,随着研究的不断深入,跟驰模型逐渐成为微观交通流的核心问题之一。从20世纪50年代开始至今,跟驰模型已经经历了近70年的发展历程,在这期间吸引了不同领域的专家参与研究,同时取得了很多富有重要意义的研究成果。
1 跟驰理论的概述
跟驰理论主要是运用动力学的方法研究单一车道上、在不允许超车的情况下后车跟随前车行驶的一种理论状态,跟驰过程中的各个环节可以通过数学建模的方法表示。跟驰理论从微观角度表达交通流特性,继而将驾驶员的微观行为和交通流的宏观现象联系起来。研究跟驰理论最重要的目的就是通过观察各个车辆的跟驰方式来了解交通流特性,从而将其应用于车辆对城市交通流的影响分析、交通安全评价和无人驾驶等领域。
车辆在道路的行驶可以分为自由状态行驶和非自由状态行驶。自由状态行驶是指行驶在道路上的车辆,因交通流密度较小、车头间距较大,几乎不受其它车辆的影响,所以发生交通事故的概率较小,此时车速主要取决于驾驶员驾驶意愿和车辆性能。非自由状态行驶即本车受到周围车辆的影响,不再能够按照驾驶员的意愿随意驾驶,为了避免发生追尾等交通事故,驾驶员会根据前后车的运动状态实时调整本车车速,并且这种受干扰的程度会随着道路交通流量的增加而愈加明显。本文所分析的跟驰模型均是在非自由状态行驶下的车辆驾驶行为。
在非自由状态行驶下,车队的跟驰理论有如下3个特性:
1)制约性。制约性包括车速条件、间距条件和紧随要求。车速条件即跟驰车速度不能长时间大于前车速度,否则会发生追尾等交通事故,故车速条件限制了跟驰车速度只能在前车速度附近摆动;间距条件就是要保持一定的安全车距,即在前车制动时,跟驰车接受到信号并采取紧急制动措施,当前后两车制动停车或减速到相同速度时(以最大的相同减速度),要保持的最小安全间距;紧随要求即跟驰车要紧随前车行驶,两车相距不能太远,若前后两车的间距大于120 m,则不能构成车辆跟驰。
2) 延迟性。前车的运动状态发生改变(加速、减速)时,跟驰车的运动状态也会随之发生相同的变化,但这种变化并不是同步发生的,跟驰车驾驶员在感知前车变化时,需要一定的反应时间T。若前车在t时刻改变运动状态,则跟驰车的运动状态在(t+T)时刻才能变化。对于车联网环境下的交通流特性,延迟性可忽略不计。
3)传递性。当第1辆车运动状态发生改变时,随之就会影响第2辆车的运动状态,第2辆又会影响第3辆,以此类推,第n辆车影响第n+1辆车,这就是跟驰模型的传递性。跟驰车n受前车n-1的影响最大,而距离跟驰车越远的前车对其影响则越小。
2 跟驰模型的发展历程
跟驰模型的概念最初是由Reuschel[1]和Pipes[2]运用运筹学方法分析车辆跟驰时提出的。Pipes假设在车辆行驶时,后车驾驶员总是期望与前车始终保持一个安全的车头间距,即车速每增加4.47 m/s,车头间距就要增加一个车长(约4.57 m)。20世纪50年代末,美国通用汽车的实验室对跟驰模型进行了大量的研究,其成果对现在的跟驰模型研究仍有很大影响。Robert等[3]基于刺激-反应类框架建立了最原始的GM模型,该模型的因变量为跟驰车加速度,此加速度会受到前车速度变化的刺激而发生改变,故GM模型的自变量为前后两车的相对速度,但是GM模型忽略了前后两车的安全行车间距。1959年,Gazis等[4]提出了GHR模型,该模型在线性跟驰模型的基础上进一步考虑前后两车的车头间距和跟驰车速度,被称为最经典的跟驰模型。Newell[5]认为车头间距是跟驰车驾驶员的直接刺激项而非相对速度,故提出了基于车头间距的非线性跟驰模型,也是经典的刺激-反应类模型。Helly[6]综合考虑前后两车的相对速度和车头间距的影响,并通过加权的方式提出了Helly模型。
安全距离是跟驰车驾驶员期望与前车保持一个安全的车头间距,并在前车紧急制动的情况下,跟驰车有足够的时间做出反应,以免发生追尾等交通事故。安全距离模型最早由Kometani等[7]提出,其通过计算前后两车的相对速度得出安全跟驰车头间距。Gipps[8]综合考虑车辆加速度和安全车头距离的约束,同时还考虑了驾驶过程中其它安全因素的影响,建立了Gipps模型。
20世纪60年代,一些专家学者开始注意到人-车-路交通系统中驾驶员对车辆行驶时的影响。跟驰模型的研究看似是前后两车运动状态的变化,实则是研究驾驶员在特定驾驶环境下的驾驶行为。Michaels[9]首次将心理学与跟驰模型理论相结合,提出的心理-生理模型假设:在跟驰行为中,跟驰车驾驶员根据前车运动状态的变化来改变本车的状态。驾驶员并非直接感知速度和加速度的变化,而是通过视觉感知和判断视野中前车后部尺寸大小的变化,来辨识与本车的距离信息,随后做出判断并实施操作。但是只有在超过特定的阈值时,驾驶员才能感知到刺激带来的信息变化。这些研究丰富了车辆的跟驰模型,使模型不再局限于传统的数值分析,增加了心理学的知识。从心理学角度出发进行认知和建模,促使多学科交叉融合发展,不断完善跟驰模型,并最终形成了心理-生理跟驰模型体系。心理-生理模型不是基于动力学产生的,而是一种决策模型。
人工智能类跟驰模型包括模糊逻辑模型、神经网络模型和模糊神经网络模型等,人工智能类跟驰模型具有计算速度快、精度高、学习能力强且能处理大量数据等优点。跟驰行为是一个复杂的非线性过程,而人工智能在处理非线性问题时占有很大的优势,同时能够精确地描述数学模型不能表达的跟驰行为特性。
1995年,Bando等[10]从物理学的角度提出了最优速度模型(简称OV模型),该模型的提出是为了解决Newell模型在车辆停启时加速度过大的问题。OV模型认为跟驰车驾驶员有一个随着车头间距而变化的最优速度,这个最优速度是跟驰车在行驶过程中期望的稳定车速;同时,模型引入敏感系数得到跟驰车加速度的变化,故跟驰车加速度由实际车速和最优速度的差值决定。OV模型能够较好地描述交叉口车辆时走时停、局部阻塞等交通流现象,但是该模型会出现减速度与实际不符的情况。1998年,Helbing等[11]提出了广义力模型(GF模型),考虑跟驰车速度大于前车速度时,前后两车的相对速度会对跟驰车的加速度产生影响,并构建了负速度差函数。2001年,Jiang等[12]在GF模型的基础上继续研究完善,提出了考虑因素更多的全速度差模型(FVD模型),即同时将前后两车的正负速度差考虑在内,探求其对跟驰行为产生的影响。
Treiber等[13]提出了智能驾驶员模型(IDM模型),即用同一种模型描述不同交通流状态(从自由行驶状态到交通拥堵状态)下的驾驶员跟驰行为,同时考虑加速和减速两种情况。此后,Treiber等在IDM模型的基础上进一步扩展,建立了HDM模型,该模型拟合结果更加关注驾驶员对驾驶过程的影响。
3 跟驰模型的分类和改进
3.1 刺激-反应类模型
刺激-反应类模型是跟驰模型中最基础的框架,它将前后两车的相对速度作为模型刺激项,跟驰车随前车状态(加速度)的变化而发生的改变为跟驰车反应,跟驰车驾驶员的反应能力为感知刺激的敏感系数;同时,为了更好地将模型还原实际,充分考虑了前后两车的车头间距和跟驰车速度,从而形成了最经典的GM跟驰模型[14-15]。GM模型具有重大意义,近年来很多专家学者提出的跟驰模型均是以该模型为基础。GM跟驰模型的一般表达式为
vn(t)],
(1)
式中:an(t+Δt)为跟驰车n在t+Δt时刻的加速度;vn(t)、xn(t)为跟驰车n在t时刻的速度和位移;vn-1(t)、xn-1(t)为前车n-1在t时刻的速度和位移;λ为感知刺激的敏感系数;Δt为驾驶员的反应时间;m、l为待标定的参数。
参数标定的精度直接影响跟驰模型的好坏,随着科学技术的不断进步,专家学者们对数据采集和处理精度的要求也越来越高。典型的GM跟驰模型在标定过程中会出现加速度不对称、危险情况下驾驶员敏感系数偏大等缺陷,为此,Lee[16]提出了基于驾驶员记忆效应的GM模型,Herman等[17]提出了基于多辆前车影响的GM跟驰模型。
3.2 安全距离Gipps模型
vn(t+τ)=vn(t)+

(2)
vn(t+τ)=-bnτ+
(3)
式(2)是车辆在自由状态行驶下的公式,该公式是Gipps根据经验所得的;式(3)是车辆在拥挤状态下对行驶速度做出的分析,在前车紧急制动时,跟驰车经过所需反应时间采取措施,车辆停止时恰好与前车保持安全距离的最小速度。
在实际运动过程中,为使两车不发生追尾等交通事故,需满足:
xn-1(T)-xn(T)≥Sn-1,
(4)

(5)
xn(T)=xn-1(t)+vn(t+τ)θ+
(6)
式中:xn-1(T)为前车在T时刻停止时的位移;xn(T)为跟驰车在T时刻停止时的位移;an为跟驰车采取的最大加速度;vn为跟驰车在当时所处环境的最大速度;bn为跟驰车的减速度;bn-1为前车的减速度;τ为驾驶员的反应时间;θ为附加安全反应时间;Sn-1为前车的有效车长,等于前后两车刹车停止后的最小安全间距与前车的实际车长之和。
Gipps模型运用牛顿运动学公式推导,具有明确的物理意义,但是该模型只考虑了拥挤状态下前后两车保持最小安全距离时的最小车速,严重约束了跟驰车速度。因为在实际的驾驶过程中,车头间距并非完全等于安全车距,而是在安全车距上下徘徊。
3.3 优化速度FVD模型
优化速度模型的思想是跟驰车驾驶员在跟驰过程中总有一个期望速度,而期望速度是由前后两车车头间距决定的。不同的车头间距对应不同的期望速度,故优化速度模型的直接反馈项是跟驰车的期望车速与当前实际车速的差值。在OV模型提出之后,专家学者们对其进行了完善,2001年,姜锐等[18]提出全速度差模型(full velocity difference,FVD模型),该模型充分考虑前后两车的车头间距、跟驰车速度以及正负速度差等因素,能够较全面准确地描述交通流中的跟驰现象。FVD模型的基本公式为
an(t)=λΔvn(t)+
α{V[Δxn(t)]-vn(t)} ,
(7)
式中:α、λ为常量敏感系数;V[Δxn(t)]为跟驰车的最优速度;Δxn(t)=xn-1(t)-xn(t)为t时刻前后两车的车头间距;Δvn(t)=vn-1(t)-vn(t)为t时刻前后两车的相对速度。其中,xn-1(t)、vn-1(t)为前车在t时刻的位移和速度;xn(t)、vn(t)为跟驰车在t时刻的位移和速度。V[Δxn(t)]的计算公式为

(8)
(9)
式中:vmax为跟驰车行驶时的最大速度;hc为安全车头间距;a为跟驰车在t时刻的加速度;τ为跟驰车驾驶员的反应时间,一般取τ=1 s;l为前导车的车长。
FVD模型被更多地应用于多车跟驰、双车道跟驰以及侧向干扰情况下的交通流非线性特性研究中。在FVD模型的基础上,Gong等[19]提出了不对称全速差模型(AFVD模型);Zhao等[20]提出了全速差和加速度差模型(FVAD模型)。
3.4 元胞自动机模型
元胞自动机(CA)模型实质上是定义在一个具有离散、有限状态的元胞组成的元胞空间,按照事先制定的局部规则在离散的时间维度上,将元胞间的相互作用转变为动力系统[21-23]。Cremer等[24]最早将这种理论运用到交通流中,较好地描述了车辆间彼此作用的个体行为。1992年,Nagel和Schreckenberg提出了NaSch模型[25],该模型只考虑了同向运动元胞的局部相互作用,车辆在运动过程中按照四步骤规则进行演化,依次为加速规则、减速规则、随机慢化规则和运动规则。NaSch模型引入了两个重要参数,即随机慢化概率p和最大速度vmax。Nagel和Ricket还提出了双车道的元胞自动机模型,研究对基本图有影响作用的参数。1996年,Fukui和Ishibashi提出了FI模型[26],FI模型和NaSch模型的区别在于FI模型认为车辆不再需要逐步加速,且只有车辆在高速行驶时随机慢化过程才起作用;Barlovic等[27]提出了VDR模型,该模型是基于车速制定的随机慢化规则。在NaSch模型的基础上,专家学者们不断修正规则、标定参数,探究对车辆运动演化的影响因素,使模型更加贴近实际情况。
3.5 经典跟驰模型的对比分析
通过对比分析刺激-反应类模型、安全距离Gipps模型、优化速度FVD模型、元胞自动机模型可以发现,虽然这几类经典跟驰模型从不同的角度进行建模,因而表现出较大的差异性,但他们也具有一些共性,如均是基于传统环境的研究且仅考虑前方一辆车运行状态的影响。各类经典跟驰模型的对比分析见表1。
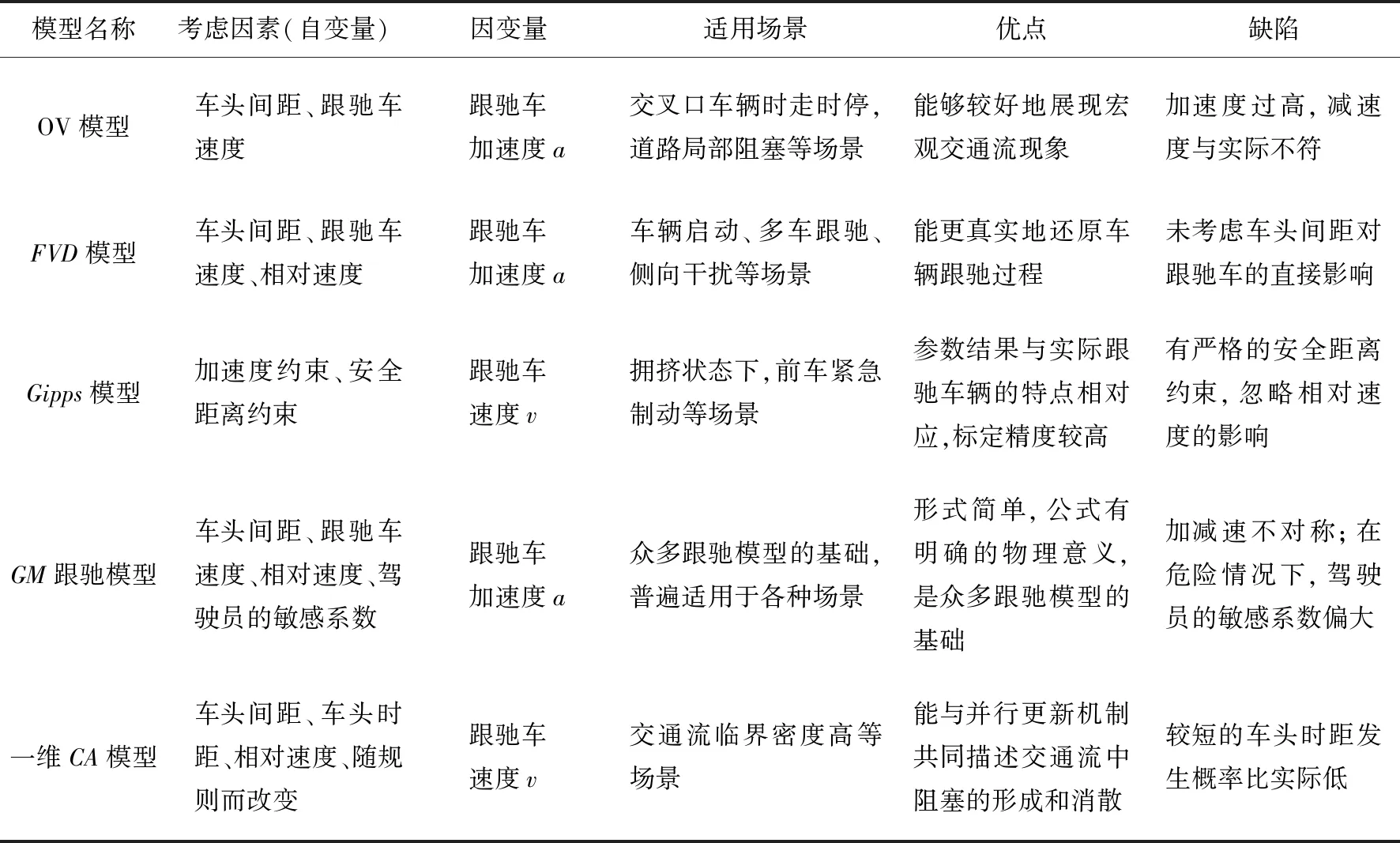
表1 经典跟驰模型对比Tab.1 Comparison of classic car-following models
4 跟驰模型未来发展趋势
随着科学技术的不断进步,跟驰模型逐渐向无人驾驶、智能网联等方向发展。根据驾驶员参与操作的程度,国际汽车工程师协会将自动驾驶分为六类,分别为无自动化驾驶、辅助驾驶、部分自动驾驶、有条件的自动驾驶、高度自动驾驶和无人驾驶。目前,高度自动驾驶是可以实现的,但因技术还不够成熟,需要做出进一步完善;无人驾驶因涉及的领域太多且难度较大,仍处于不断的探索中。要实现无人驾驶技术,需要搭建起无人驾驶的框架,实现人-车-路互联,数据实时更新和传输。在无人驾驶环境中,道路的运行效率、能源利用率和安全性能都能得到较好的改善。车辆在跟驰过程中,跟驰车能够实时接受周围车辆的信息,进而调整自身运动的状态,在保证汽车行驶安全的大前提下,控制自身车速在非自由状态行驶时达到最优。
在传统的跟驰模型中一般只考虑前面一辆车的运动状态,信息在传递过程中也存在延迟性,为“模糊的一对一”模式。但在无人驾驶环境中,车辆信息是交互共享的,多为“精准多对一”模式,因此降低了驾驶过程中人为的不确定性、随机性和差异性等。无人驾驶系统框架如图1所示。

图1 无人驾驶系统框架图Fig.1 Driverless system framework
传统跟驰模型多是在天气、地形条件良好的情况下研究的,因而忽略了外部环境的影响,如雨雪天气、大雾天气、丘陵山区等。在无人驾驶环境下,对车辆跟驰有影响的天气环境、地形变化等因素也需被考虑在内。基于路侧信息感知子系统的应用,可将天气信息、地形信息传输到网络中,经过系统分析,提高车辆安全跟驰效率。总之,无人驾驶环境下的多信息融合跟驰模型是未来研究车辆跟驰的趋势和热点。
5 结束语
车辆跟驰模型经历了近70年的发展历程,学者们也一直在已有经典模型的基础上再分析、再优化。为了使模型更好地贴合实际,在建模过程中,综合考虑各种因素,模型由简单到复杂,由单一到多元。随着科学技术的发展和5G技术的出现,无人驾驶环境下,多信息融合的跟驰模型未来会更精准地还原道路上的交通流。
