新型恒力机构的设计与分析
2022-08-18单烨钟建华丁冰晓
单烨,钟建华,丁冰晓
(1.福州大学 先进制造学院,福建 泉州 362200;2.福州大学 机械工程及自动化学院,福建 福州 350116;3.吉首大学 物理与机电工程学院,湖南 吉首 416000)
恒力机构在一定的输入位移范围内能够输出恒定或者接近恒定的力,在精密仪器[1]、振动隔离[2]、过载保护、微机电系统等方面应用广泛。柔顺机构是一种利用柔性构件的弹性变形来实现运动、能量、力的传递和转化的机构[3]。柔顺恒力机构是一种被动的力控方式,因此不需要精密的传感器和复杂的控制算法[4],降低了力控的成本和开发的难度。与传统的恒力机构相比,柔顺恒力机构不仅具有无摩擦,无磨损,无需润滑等特点[5],还具有与位置环境灵活交互的特点。
很多学者对柔顺恒力机构进行了深入研究,如Ma等[6]利用柔顺梁的第二弯曲模式开发出了大行程的常力机构,固定导向柔性梁的双梁约束模型(Bi-BCM)表明,当固定导向梁偏转到其第二弯曲模式(即偏转的梁带有两个拐点)时,其顶端轴力保持不变;Hao等[7]利用正刚度机构和负刚度机构并联构成了准零刚度机构即恒力机构并分析了影响恒力机构特性的参数,同时利用两个对称的恒力机构设计了一种恒力夹具,通过调节在正刚度机构上施加的力,可以调节恒力机构恒力的大小。针对空间恒力机构,Zhou等[8]通过将新型负刚度机构与正刚度机构并联连接,开发了一种具有良好轴向导向能力的准零刚度抗干扰机构,该机构呈现出空间对称性,使得机构具有较大的平面内横向刚度。本文提出一种新型恒力机构,并对机构进行数学建模和有限元分析。
1 恒力机构的设计
常见的恒力机构是由具有正刚度特性的正刚度机构和具有负刚度特性的负刚度机构并联而成[9]。正刚度机构符合胡克定律,其弹性力与位移成正比;负刚度机构一般为具有双稳态特性的双稳态梁。并联型恒力机构设计原理[10]如图1所示。

图1 并联型恒力机构原理Fig.1 Principle of parallel constant force mechanism
根据图1可得:
(1)

(2)
式中:F1为正刚度机构的弹力;F2为双稳态机构在负刚度特性阶段的弹力;F为恒力机构的弹力;K1为正刚度机构的刚度;K2为负刚度机构在负刚度特性阶段的刚度;K为恒力机构刚度;x为机构的输入位移。
当K1和K2大小相同时,相互抵消,机构表现出零刚度特性,实现常力输出[11]。因此
(3)
式中:Δx为恒力机构的位移;Δx1为正刚度机构的位移;Δx2为负刚度机构的位移。
(4)
式中K为恒力机构的刚度。
根据上述原理,构建出如图2所示的恒力机构[12],该机构由双稳态梁和折叠直梁组成的正刚度机构并联而成[13]。

图2 恒力机构模型图Fig.2 Model drawing of constant force mechanism
正刚度机构基于柔性的线性弹簧原理实现,设计结构如图3所示。正刚度线性弹簧机构是一种对称折叠的设计,能使机构在平面内进行较大的平移运动,且易于制造[14]。折叠设计消除了正刚度机构轴向位移的负面影响,使载荷在主平移方向上加强。

图3 正刚度机构参数Fig.3 Parameters of positive stiffness mechanism
1.1 负刚度机构
本文提出的负刚度机构由一对空间对称倾斜直梁组成,如图4所示。双稳态梁的尺寸参数见表1。

图4 双稳态梁机构Fig.4 Bistable beam mechanism

表1 双稳态机构参数Tab.1 Bistable mechanism parameters
双稳态梁在机构的变形过程中有两个稳定的状态,当处于这两个稳定的状态时,机构并不需要外力便可维持自身的状态[15]。
双稳态梁是由两对固定倾斜梁对称分布而成,由于结构的对称分布,使双稳态梁具有负刚度特性。如图5所示,D0-D1和D3-D4阶段为正刚度阶段[16],D1-D3为负刚度阶段,其中D1-D2与D2-D3阶段机构弹力的方向相反[17]。
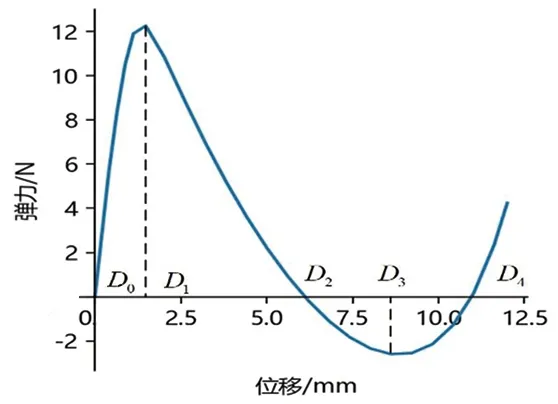
图5 双稳态梁特性图Fig.5 Bistable beam characteristic diagram
1.2 双稳态梁的结构分析
对于柔顺梁的大变形问题,可以把悬臂梁看做欧拉-伯努利梁来处理,符合平截面假定和垂直法线假定,只考虑弯曲变形,忽略梁的剪切变形。Euler-Bernoulli梁方程为[18]
(5)
悬臂梁的模型分析如图6所示,初始形状是直的悬臂梁受到力ηP和M0的组合作用,其中ηP可以分解为水平方向的nP和竖直方向的P。悬臂梁变形过后自由端的坐标值为(a,b),自由端的变形角为θ0[19],取悬臂梁上任意一点坐标为(x,y),则该点处力矩可以表示为
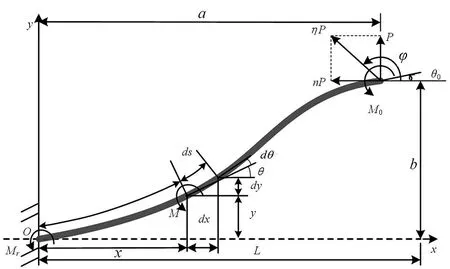
图6 悬臂梁的模型分析Fig.6 Model analysis of cantilever beam

(6)
M=P(a-x)+nP(b-y)+M0。
(7)
将式(5)、式(7)代入可得
(8)
式中:E为悬臂梁的杨氏模量;I为惯性矩;式(8)又可以写成
(9)
式中θ0是悬臂梁末端弯曲的角度。由式(9)可得

(10)
式中:a/L和b/L分别是悬臂梁变形后在x轴和y轴上的无量纲坐标。根据弹性理论,弯曲梁中可以有任意个拐点[20-21],令拐点的数量为m,如图7所示。

图7 悬臂梁的大变形弯曲模式Fig.7 Large deformation bending mode of cantilever beam

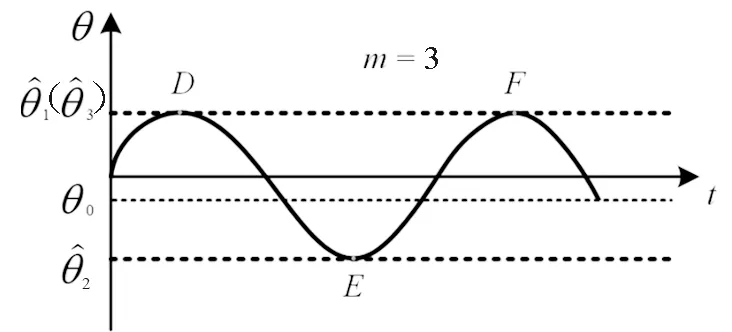
图8 弯曲梁角度θ的变化Fig.8 Bending beam angle θ change
(11)

(12)
第一和第二类不完全椭圆积分定义如下:
(13)

(14)
式中:γ为振幅;t为椭圆模。当γ=π/2时,变为第一、第二类完全椭圆积分,由于椭圆积分的限制,椭圆积分被划分为两部分|γ|>η和|γ|≤η。
当|γ|>η时,变形曲线呈单调变化[22],因此没有拐点(m=0),此时
(15)
式中:
当|γ|≤η,弯曲曲线可以有任意多个拐点(m≥0),此时

(17)
式中:
式(15)—式(18)中包括7个未知数:3个负载参数(α,k,n)、3个弯曲参数和1个形状参数(m)。计算时,应首先明确倾斜梁的弯曲模式即拐点数目。当拐点数目m=0时,变形可以通过式|γ|>η或|γ|≤η求解;当拐点数目m≥1时,可以通过式(17)、式(18),在其他的6个参数中任意给定其中3个,另外3个就可以得到求解。
2 模型仿真分析
2.1 双稳态梁模型的仿真分析
图4所示的双稳态梁机构中,设L为倾斜梁的长度,β为倾斜梁与水平方向的夹角,h为倾斜梁的厚度,w为平面外宽度,d为两个倾斜梁的间距。采用有限元分析软件Workbench对双稳态梁的参数进行建模分析,结果如图9—图12所示。
由图9可知,随着角度的增大,机构的负刚度也随着增大,同时倾斜角度的增大也使得机构的负刚度特性范围变大。由图10可知,随着长厚比的减小,双稳态梁的刚度在增加。由图11可以看出,倾斜梁的间距对倾斜梁特性的影响比较小,一般根据机构的尺寸来选取合适的倾斜梁间距。由图12可知,倾斜梁宽度的增加使得倾斜梁的负刚度增加,且三条曲线相交于一点;虽然倾斜梁的宽度不同,但弹力方向变化的临界点处于同一位置,且负刚度机构的负刚度特性范围也是一致的。
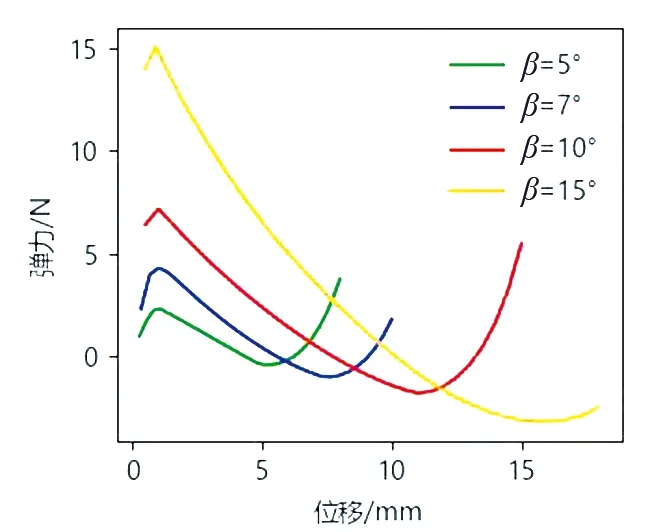
图9 角度β对双稳态特性的影响Fig.9 The influence of the angle β on the bistable characteristics

图10 长厚比对双稳态特性的影响Fig.10 The influence of the length-to-thickness ratio on the bistable characteristics

图11 间距对双稳态特性的影响Fig.11 The influence of the spacing on the bistable characteristics

图12 平面外宽度对双稳态特性的影响Fig.12 The influence of the out-of-plane width on the bistable characteristics
综上所述,双稳态梁的参数对负刚度特性的影响各不相同。双稳态梁的倾斜角度β、长厚比L/h、倾斜梁的宽度w对双稳态梁的特性有较大影响,双稳态梁的间距d对双稳态梁的特性影响较小。
2.2 恒力机构的仿真分析
利用仿真软件Workbench对恒力机构进行仿真分析,材料使用ABS树脂塑料。首先设置合适的边界条件,然后给恒力机构施加5 mm的位移,得到的整体变形图如图13所示。从图13可以看出,恒力机构的最大变形为6.200 8 mm,在恒力机构的最大变形范围之内。
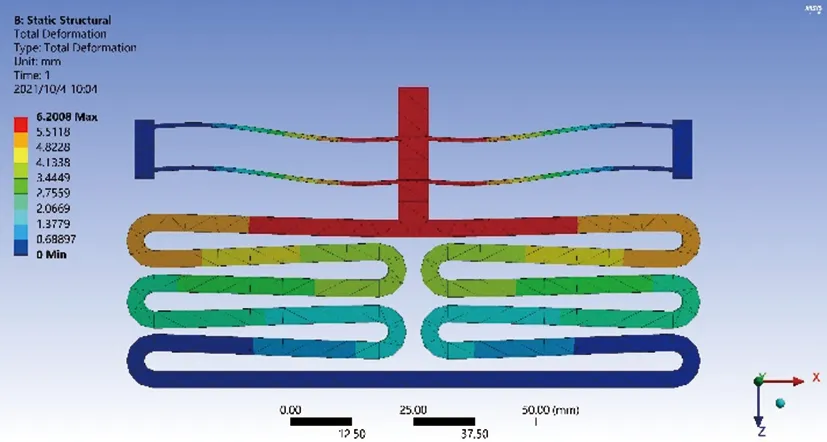
图13 恒力机构的整体变形图Fig.13 Total deformation diagram of constant force mechanism
图14为恒力机构的等效应力图,从图14中可以看出,整体机构的最大应力为11.785 MPa,最大应力在ABS的许用应力2 GPa之内,并且恒力机构的整体应力分布均匀,应力集中现象出现较少。

图14 恒力机构的等效应力图Fig.14 Equivalent stress of constant force mechanism
图15为柔顺恒力机构的恒力特性图,从图15中可以看出,当施加的位移从0开始至1.3 mm时,机构呈现正刚度机构特性;位移大于1.3 mm后,机构开始呈现出恒力机构特性,恒力值大约为6.2 N,恒力特性范围从1.3 mm至3.2 mm;位移大于3.2 mm后,恒力机构再次呈现出正刚度特性[23]
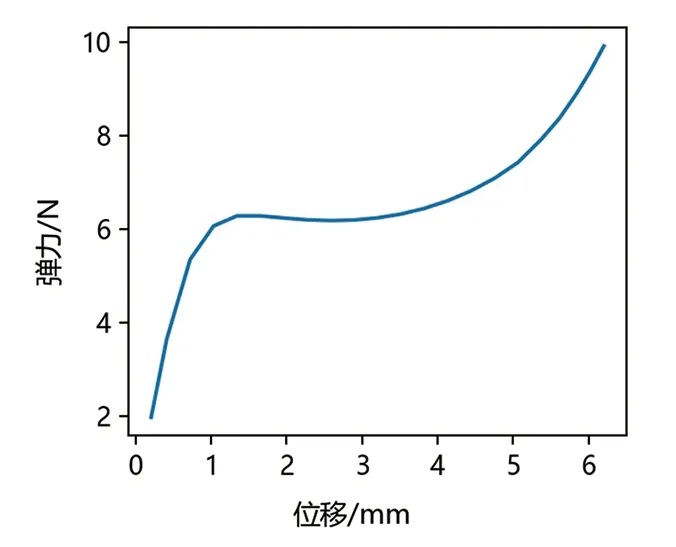
图15 恒力机构特性Fig.15 Constant force mechanism characteristics
3 结束语
本文设计了一种新型的恒力机构,对负刚度机构即双稳态机构的参数进行了对比分析,明确了各参数对负刚度机构特性的影响程度,同时对恒力机构进行了有限元仿真分析。仿真结果表明,所设计的柔顺恒力机构有约2 mm恒力范围且恒力大小约为6.2 N。本文所设计的柔顺恒力机构恒力范围较小,且并没有对恒力的可调性能进行测试,今后可进一步扩大恒力范围并对恒力机构的恒力可调性能进行测试。
