基于无线传感器的电力巡检机器人轨迹跟踪研究*
2022-08-17袁兴宇唐立军杨家全严玉廷冯勇
袁兴宇,唐立军,杨家全,严玉廷,冯勇
(云南电网有限责任公司电力科学研究院,云南昆明 650000)
1 引言
高压输电线路是电力系统中非常重要的设施,但由于长期暴露在外,受各种外界因素和不可抗力的多重影响,极易出现故障问题,输电线路的检测变得极为重要,因此高压输电线路的定期检测维修是供电安全的保障,可通过巡检机器人降低人力物力消耗,来对输电线路进行实时跟踪监测。在导航模式下,磁轨迹导航是巡检机器人常用的技术,机器人前端的传感器能够感应机器人行驶路径,若其偏离轨道,就会调整机器人两轮差速控制机器人回到原来的轨道。但是如果在干扰强的情况下,很容易出现定位精度不高的情况,而且轨道长时间裸露在外,也会导致轨道损耗加快。因为实时位置无法准确地反馈给控制室,操作人员也很难进行远程监控,这也是机器人最大的缺点。
文献[1]对巡检机器人建立了控制系统的数字模型,并且利用变换数值方法设计模糊控制器。当机器人的行驶轨迹与规定轨迹偏差特别大的时候,使用模糊控制器将机器人带回规定轨道上。实验结果被证明,模糊控制器对机器人的行驶轨迹控制远远比传统的控制方法要精准,且定位原理简单可靠,但是存在人工铺设磁道、地面处理工作量大的问题。文献[2]提出一种针对关节机器人的轨迹跟踪控制方法,基于前馈控制的思想,设计常规PID 控制的前馈补偿项,实验结果表明,该控制方法能保证系统良好的轨迹跟踪性能,并能有效抑制干扰,与常规PID 控制效果相比,具有更好的控制和跟踪性能。有效地提高了系统的跟踪性能,可将该方法应用于GR-II型双关节机器人系统,但是该系统定位路径灵活性和抗干扰能力较差。
基于上述研究,本文提出一种基于无线传感器的电力巡检机器人轨迹跟踪研究。其定位原理是充分考虑变电站外界环境因素的影响,设计双磁传感器导航系统,使机器人始终在给定的检测路径上行走。仿真实验结果表明:本文方法对巡检机器人轨迹跟踪定位精度高,重复性好,抗干扰能力强。
2 无线传感器下电力巡检机器人系统设计
轮式移动机器人可以通过采集电力设备运行状态等信息,去监控电力设备是否存在缺陷和是否有异常物体等。这样就可以对无人看管的变电站进行高压设备进行巡检,保证安全生产[3-4]。这就是电力巡检机器人的工作模式。
2.1 机器人远程测控系统
变电站位于户外,电压高,电磁干扰强,准确地控制和导航,可以确保巡检机器人工作时平稳运行。机械结构作为巡检机器人系统的基础,更是巡检机器人适应高压线路环境、完成作业要求的关键技术之一[5-6]。TCP连接建立及数据收发状态切换如图1所示。
2.2 总体结构
变电站巡检机器是一种轮式移动机器人,能够独立或远程控制非运行变电站内的外部高压设备,收集电气设备运行信息,快速察觉电气设备出现的异常现象,确保电力生产安全的安全性能。
巡检机器人的功能模块如图2所示。
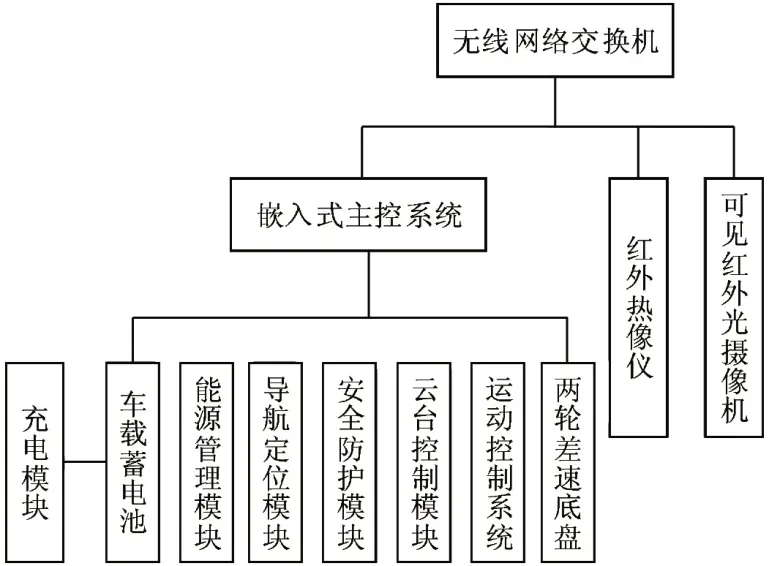
图2 巡检机器人功能模块
变电站内路面为水泥地面,机器人速度为0.4~1m/s,根据巡检机器人的工作环境和机动性要求,设计底盘,如图3所示。底盘采用四轮支撑、两轮差速驱动:两个万向轮5 安装在底盘前部,两个驱动轮1安装在底盘后部。通过两个驱动轮的轮速差可以实现柔性转向。为了使机器人上下山有在斜坡上翻倒的危险,请将较重的部件(如电池组4)放在机箱的中间。激光雷达8安装在底盘前端,用于检测机器人前进方向是否有行人、电线杆等防止碰撞障碍物[7-8]。
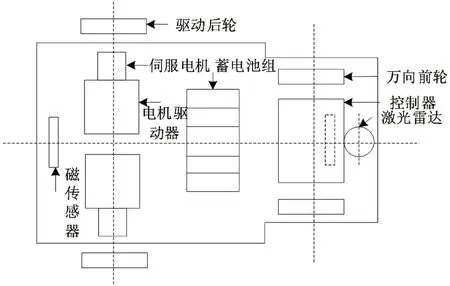
图3 巡检机器人底盘结构
两个驱动轮采用中空充气橡胶轮胎,减轻了车身重量,增强了减震效果。该底盘具有转弯半径小、灵活性强的优点。
两个磁性传感器安装在底盘的前部和后部,当机器人运行时,磁传感器连续感测位于检测路径上的磁条信息[9]。垂直于磁条上方的采样点可以感应到磁条信号并输出相应的状态,机器人控制系统可以获得车体轴线与已建立的检测路径的偏差,并调节驱动轮的速度,能够保证机器人一直在规定路线上行驶。磁条一般选用永久磁铁,能够不受外界环境影响。本文设计的系统在机器人本体的前部和底部安装了一个磁性传感器。
为了保证机器人有更强的越障能力,能够适应各种环境,一般采用四轮履带底盘的结构,整车采用24V锂电池供电。
3 电力巡检机器人轨迹跟踪
为了完成巡查、越障等多种作业,需要考虑不同作业任务的不同作业轨迹。因此,在关节空间进行初始规划,检查机器人的运动轨迹是否与障碍物相撞,并进行调整[10]。
电力巡检机器人轨迹跟踪要求机器人具有一定的智能。产生式推理系统是控制系统中广泛应用的一种智能控制方法。它以规则的形式存储一些已有知识。
3.1 机器人运动数学模型建立
机器人运动学分析包括正运动学分析和逆运动学分析。正运动学分析是根据给定的机器人关节变量求解机器人末端执行器的位置和姿态;逆运动学是根据给定的机器人末端执行器位置和姿态求解机器人关节变量。由于本文主要研究的是正向运动的控制,故不进行逆运动学分析。
控制机器人的运动就是控制机器人各杆件和关节之间的相对位置、速度和力[11-12]。因此,机器人运动数学模型是运动控制的基础。
在客户端的控制命令一共编制了18 个字节数,保证机器人能够进行前进、后退、停止和多档调速的工作,具体内容如表1所示。

表1 机器人运动控制指令格式
在平面坐标系内,机器人的位置信息为Rob=[x,y,q]T,其中x,y为平面坐标,θ所描述的是机器人实际控制角。为了简化控制,将机器人的轨迹分为两部分有直线运动和圆弧运动两种。对于复杂曲线,采用这两种曲线进行拟合。给出了圆弧移动时圆心和半径,圆心为Ro=[xo,yo,0]T,半径为R,速度为V,旋转角为△θ。机器人运动的数学模型如图4所示,则旋转矩阵为:
机器人转过角度△I=[0,0,Dq]T之后,为。并且:

机器人运动模型如图4所示。
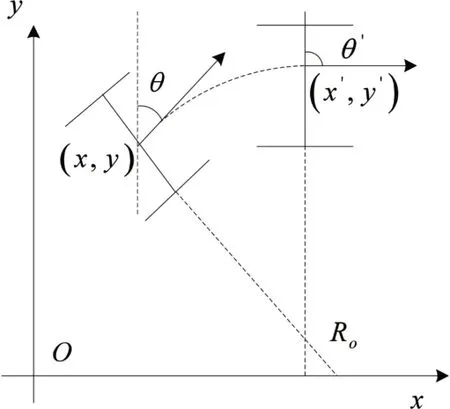
图4 机器人运动数学模型
3.2 自适应鲁棒滑模变结构轨迹跟踪算法
通过设置位置控制率,采用自适应鲁棒滑模变结构控制算法,对机器人进行坐标跟踪。假设理想轨迹为[xd,yd],实时位置为[x,y],那么位置误差为[xe,ye]=[x-xd,x-yd]。将其代入到式(1)中即可得出公式为:

3.2.1 位置控制率
(1)对于X轴控制率设计为:假设u1=υ cos θ,取滑模变结构函数s1=xe,经过求导可获得,设计控制了为。其中,k1>0,可得出。
构建李雅普诺夫函数,其公式为:

经过求导运算,得出公式即:

因为k1>0,所以成立≤0,系统稳定。
(2)对于Y轴控制率设计为:假设u2=υ cos θ,取滑模变结构函数s2=ye,经过求导可获得,设计控制了为。其中,k2>0,可得出。
构建李雅普诺夫函数,其公式为:

经过求导运算,得出公式即:

因为k2>0,所以≤0 成立,系统稳定。根据上述方程可以得出实际位置控制率即:

式中,理想控制角θd与系统运行过程存在误差,需要设计姿态控制率,使实际控制角与理想控制角的误差为0。
3.2.2 姿态控制率
假设理想角与实际控制角的误差为θe=θ-θd,取滑模函数s3=θe,得到导数为:

设计滑模姿态控制率即:

构建李雅普诺夫函数,其公式为:

经过求导运算,得出公式即:

利用柯西-施瓦茨不等式,能够获得公式为:

因为k3>0,所以≤0成立,系统稳定。
由于变电站巡检路径中的路径大多为直线,机器人运行路径可简化为直线路径。对于交叉路线中的长距离转弯,可采用多条直线路径代替。每个路径可以相互连接,以确定机器人的运行路径。根据路径点的不同,定义机器人的运行路径,从而灵活地确定机器人的运行路径。针对变电站路径的特点,利用后台监控软件和机器人运动控制器完成导航任务:当巡检机器人在导航任务中运行到预定路径的目的地时,将“机器人无路径运行”的异常信息发送给后台监控软件。异常处理完成后,后台监控软件将导航任务中的下一条路径信息发送给机器人运动控制器,机器人运动控制器相互配合完成整个检测任务的轨迹跟踪。该后台监控软件管理系统登录页面如图5所示。
图5 后台监控软件管理系统登录页面
4 轨迹跟踪仿真实验
为了验证基于无线传感器的电力巡检机器人轨迹跟踪的效果及可行性,设计仿真实验。在实验过程中,首先在室外环境中布置导航标志点,在全球坐标系中精确测量每个导航标志点的位置坐标并存储在NAV200系统中;然后通过后台监控计算机将导航任务数据传送给机器人运动控制器,使机器人能够沿着导航任务设置的路线稳定运行。运行系统为Windows 10。实验参数设置如表2所示。
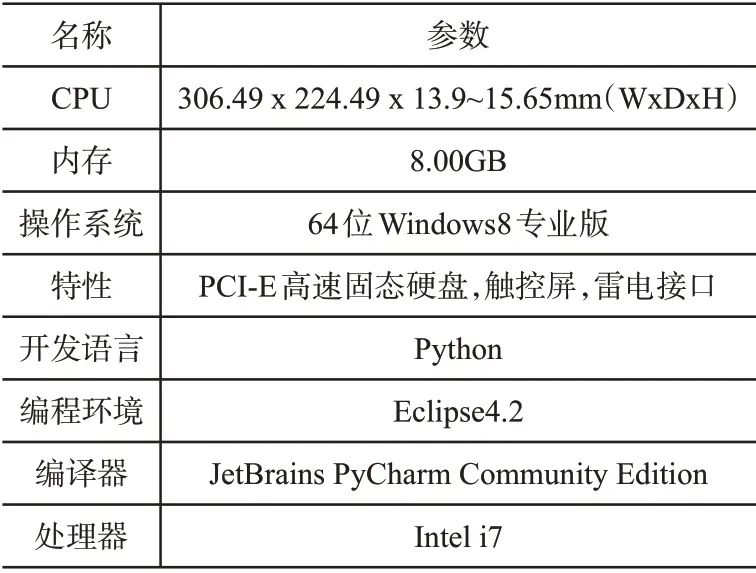
表2 软硬件环境配置
根据上述环境,检测电力巡检机器人轨迹跟踪定位精度,其计算公式如下:

式中,n表示检测电力巡检机器人轨迹跟踪定位数量;v表示电力巡检机器人轨迹的实际定位数量;v′为电力巡检机器人轨迹的预测定位数量。根据公式计算电力巡检机器人轨迹跟踪定位精度分布允许误差值如表3所示。

表3 电力巡检机器人轨迹跟踪定位精度分布等级表
以此为标准进行与传统两种方法对比,当准确性指标值在5%以下并且区段误差在0.2以下时,为准确性一级,误差保持在规定极限以内。根据公式(14)计算,文献[1]方法的误差值为9.7%,属于第二等级误差;文献[2]方法误差值为9.6%,同样属于第二等级误差;而本文方法的误差值为0.7%,属于误差第一等级,说明本文方法定位精度较高。
将人工测量的空气温度、空气湿度、光照强度和客户端测量值进行比较。巡检机器人数据测试实验结果如表4所示。

表4 巡检机器人数据测试实验结果
从表4中可以看出,人工测量值和客户端测量值偏差很小,所以巡检机器人完全可以代替人工巡检,提高工作效率。
在无线传感器环境下建立了检测机器人模型。假设理想轨迹方程为xd=t,yd=sin(0.5x)+0.5x+1。η=0.1,k1=k2=0.3,k3=3,初始位置值为坐标原点,同时利用文献[1]方法、文献[2]方法以及本文方法做对比,比较不同方法电力巡检机器人轨迹跟踪结果,具体如图6所示。
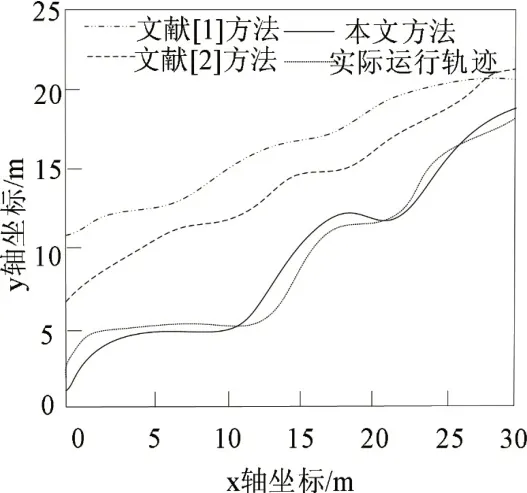
图6 电力巡检机器人轨迹跟踪仿真结果
由图6可知,文献[1]方法和文献[2]方法在电力巡检机器人轨迹跟踪线路与实际运行轨迹偏离较远,而本文方法在电力巡检机器人轨迹跟踪控制中与实际运行轨迹相差不大,其原因是本文方法对于电力巡检机器人交叉路线中的长距离转弯,采用了多条直线路径代替,每个路径可以相互连接,确定了机器人的运行路径,且根据路径点的不同,定义了电力巡检机器人的运行路径,从而灵活地确定电力巡检机器人的运行路径,一定程度上使本文方法的运行轨迹与实际运行轨迹相符。
为了进一步验证基于无线传感器的电力巡检机器人轨迹跟踪的可行性,将机器人带到规定路线外大概30米处,机器人在获得定位信息后,通过两轮差速自行回到了规定轨迹上,并按预定轨迹继续运行,使巡检机器人系统具有良好的跟踪能力。在得到机器人的准确定位后,机器人开始按照规定的轨迹工作。利用公式(3)分别计算文献[1]方法、文献[2]方法以及本文方法的x轴误差和y轴误差与角度误差,其实际的x轴误差和y轴误差与角度误差的对比波形图如图7所示。

图7 不同方法误差波形图
由图7可知,利用文献[1]方法、文献[2]方法和本文方法分别对x轴、y轴以及角度误差进行验证发现,文献[1]方法和文献[2]方法的运行误差与实际误差相差较大,而本文方法x轴、y 轴以及角度误差相差较小。在实际过程中,根据具体情况以及规律,推算出解决当前误差形势的最佳途径。综上所述,运用自适应鲁棒滑模变结构控制算法的巡检机器人系统能够稳定有效地跟踪理想曲线,且误差较小,具有良好的控制效果。
5 结束语
本文提出一种基于无线传感器的电力巡检机器人轨迹跟踪研究,设计了双磁导航传感器系统的机械结构和控制系统,并对电力巡检机器人进行远程测控,根据机器人位置和给定轨迹之间的偏差,通过自适应鲁棒滑模变结构轨迹跟踪算法分配左右驱动轮的速度,最终完成轨迹跟踪。仿真结果表明,本文设计的控制器能够实现纵向机动轨迹指令的稳定跟踪,能够有效减少轨迹跟踪误差。
