受生物启发的扑翼飞行器弹跳机构概念设计
2022-08-17马东福宋笔锋宣建林
马东福 宋笔锋 薛 栋 宣建林
西北工业大学航空学院,西安,710072
0 引言
扑翼飞行器是一种仿生飞行的新概念飞行器,具有体积小、机动性好、隐蔽性强等诸多特点[1-2],尤其在军事方面有着广泛的应用前景和发展潜力。目前扑翼飞行器研制已经取得诸多成果,其中具有代表性的有Smartbird[3]、中国“信鸽”[4]等。扑翼飞行器在执行任务时,所处的环境复杂多变(如在侦查敌情时,需要隐蔽在某个角落进行定点监控,完成监控后再次起飞执行下一个任务),这就要求扑翼飞行器必须具备自主起降能力。事实上,大部分样机还是手抛起飞的,实现自主起降的报道很少[5]。
许多研究尝试解决该问题。与鸟类奔跑起飞类似,文献[6-7]中将轮式起落架安装在扑翼飞行器的机腹,将机身支撑起最优的起飞角度,扑动翼扑动推动机身在地面滑跑,达到起飞速度时完成起飞。从静止加速到起飞速度需要一定的滑跑距离,要求起飞场地较为平整,同时,在扑动滑行过程中,机翼周期性上下扑动会造成机身振动[8],这也对前进时机轮指向稳定性产生不利影响。文献[9]中的扑翼飞行器安装了一对仿生机械鸟爪,使其可以像鸟类一样栖停在屋顶、电线杆或者树枝等高处,起飞时,只需从栖停地滑落,进入滑翔模式获得起飞速度完成起飞,然而精准降落仍成问题。文献[10]采用旋翼混合布局的方式,通过四旋翼与扑翼的结合,使扑翼飞行器获得垂直起飞降落的能力,但该方式极大地影响了扑翼飞行器的仿生性能。
受鸟类启发,跳跃是一种短时间内获得高速的极为有效的方法[11]。诸多弹跳机器人表现出了超强的弹跳性能[12-13]。文献[14-17]给出了不同结构的弹跳机构,验证了扑翼飞行器弹跳起飞技术的可行性,但仍存在仿生程度不高、弹跳性能低等问题。
不同于以往的研究,本文旨在从仿生学角度出发,通过对鸟类跳跃起飞运动的研究,设计出高效、仿生程度高的仿鸟腿弹跳机构。本文对扑翼飞行器弹跳起飞动态过程进行了设计,给出了仿鸟腿弹跳机构设计要求;基于鸟腿骨骼结构设计了仿鸟腿弹跳机构,然后对其运动学和动力学问题进行了分析;建立了仿鸟腿弹跳机构模型并进行了仿真分析。
1 弹跳-扑翼复合运动分析
1.1 弹跳-扑翼动态过程分析
为从工程设计角度理解弹跳-扑翼动态过程,需要对鸟类跳跃起飞的动态过程进行细致的分析。文献[16]提供了乌鸦在一次跳跃起飞过程中一系列的高速摄像画面,它与椋鸟跳跃起飞的动作高度相似[18]。视频画面中,根据腿的姿势,选取3个姿势:站立姿势(-160 ms)、最大屈曲姿势(0 ms)和翅膀最大展开姿势(68 ms,脚即将离开地面),进行定性分析,并将其延伸到扑翼飞行器的弹跳起飞动态过程。
如图1a和图1b所示,乌鸦从站立姿势到蹲下/屈曲姿势的过程中,后肢骨骼角度变化,肌肉储存了大量的弹性能量,重心位置垂直下降;从最大屈曲姿势到伸展姿势的过程中,后肢骨骼迅速打开直至伸展到最大角度,肌肉储存的弹性能量快速释放,转换为动能和重力势能,重心位置斜向上上升。将跳跃运动运用到扑翼飞行器上时,可将其归结为弹跳机构弹性势能储存及释放的过程。
弹跳起飞扑翼飞行器系统可分为弹跳机构和安装于其上的扑翼飞行器平台。弹跳机构的主要功能是将整个系统弹射到一定的安全起飞高度(扑动翼翼尖最大幅度向下扑动时不触地的最小高度),并将整个系统加速到合适的起飞速度(扑翼飞行器的最小起飞速度);扑翼飞行器平台的功能是弹跳机构发生作用后,承接后续的扑翼运动,带动整系统进行飞行,执行相关的任务。如图1c所示,扑翼飞行器弹跳起飞动态过程可分为以下4个阶段:A—B为起跳准备阶段,弹跳机构动作,扑翼飞行器重心降低并至合适的起飞角度,相关储能元件储存弹性势能;B—C为弹跳起飞阶段,弹跳机构触发,弹性势能快速释放,将扑翼飞行器以一定角度弹射到安全高度并加速至起飞速度,此时扑动翼开始扑动;C—D为飞行爬升阶段,弹跳机构收缩,扑翼飞行器爬升到预定高度,进入稳定飞行状态;D之后为任务阶段,扑翼飞行器按照预定任务轨迹自主飞行,执行侦查等任务。

(a)乌鸦跳跃起飞过程中3个主要姿势
1.2 弹跳机构设计要求
从扑翼飞行器弹跳起飞动态过程可以看到,当弹跳机构发生弹跳动作后,扑动翼随即开始扑动,完成起飞,因此从弹跳到扑翼飞行状态的转变尤为重要。本文以研制较为成熟的“信鸽”飞行器[4]为基础进行弹跳机构设计,其最大起飞质量270 g,最低平飞速度7.9 m/s。
目前,跳跃机器人理论模型相关研究已经较为全面,在机构设计和样机研制方面也取得了不错的进展,但结合扑翼飞行器的弹跳起飞要求来看,仿鸟腿弹跳机构既要达到鸟类跳跃起飞的优越性能,又要模仿鸟类腿部结构形式,这项工作极具挑战。
扑翼飞行器主要的运动方式为飞行,对质量极为敏感,弹跳机构虽只在起飞阶段动作,但需将飞行器加速到起飞速度。目前关于仿鸟腿弹跳机构的设计研究还很少,对定义弹跳腿各节段大小和跳跃姿势的方法也涉及较少,因此如何在规定的质量下完成额定的动作,成为仿鸟腿弹跳机构设计的一大难点。
驱动方式对机构的运动模式及性能起到了决定作用。自然驱动系统多采用肌肉作为驱动器,其质量成本很低,因此在完成某项动作时,动物常采用多个驱动器来驱动。相比于自然驱动系统,机器人驱动系统常常由于考虑到气压、液压或电机等驱动器的高质量成本,从而多采用单个驱动器进行驱动。单驱动跳跃腿只能产生一种运动模式,而鸟类在屈膝和伸展阶段却表现出不同的腿运动模式,增加驱动器或许会解决此问题,但这又会使质量更大、控制系统更复杂,因此这也是仿鸟腿弹跳机构设计的一大矛盾。
根据上述分析,对扑翼飞行器弹跳机构设计提出以下要求:
(1)结构简单、轻便、仿生性好,能够支撑飞行器的质量;
(2)倾斜起飞,净推力应该通过系统的质心;
(3)腿部具有较大的折叠范围以储存更多的能量,可快速、高效地完成从陆地到空中的过渡。
2 仿鸟腿弹跳机构模型的建立
通过对图2a鸟类后肢骨骼结构的分析,得到了图2b所示的开链多关节仿鸟腿弹跳机构简图。图中杆1、杆2、杆3、杆4和杆6分别为跗跖骨、胫骨、股骨、躯干和趾骨,A、B、C、D分别为跗跖关节、踝关节、膝关节和髋关节。

(a)鸟类后肢骨骼结构 (b)开链多关节仿鸟腿弹跳机构简图
开链多关节仿生机构具有与仿生对象相似的结构,可较好地模拟生物的跳跃运动机理,实现丰富的运动姿态,但它在驱动上存在功率输出小、能量效率低和稳定性差等问题,大多还处于理论研究阶段[19]。由于开链多关节机构是一个多自由度系统,因此在实现运动时,需要多个驱动器来驱动,使得机构的尺寸和质量同时增加、控制系统更复杂,这显然与仿鸟扑翼飞行器弹跳机构的设计要求矛盾,不利于实际应用。针对上述问题,本文设计了一种闭链仿鸟腿弹跳机构。
2.1 闭链环路Ⅰ设计
在图2b所示的开链多关节弹跳机构的基础上,将杆1延长至G点,同时增加杆5,储能弹簧置于CG关节之间,便得到由跗跖骨延长杆1、胫骨杆2、股骨杆3、躯干杆4和辅助杆5构成的闭链五杆机构。
此时得到的闭链五杆机构的自由度为2,为了降低自由度,在股骨杆3和辅助杆5与躯干连接的地方增加传动齿轮,与股骨杆3固连的齿轮3a和与辅助杆5固连的齿轮5a在躯干处啮合形成传动关系,此时闭链五杆机构BCDEG演化成自由度为1的闭链齿轮-五杆机构,如图3所示。

图3 闭链齿轮-五杆机构
2.2 闭链环路Ⅱ设计
跗跖关节A是与地面接触并产生支撑力的主要关节,同时在落地时起缓冲作用,因此将跗跖关节A设计成被动关节。如图4所示,在杆1和杆6之间添加杆HI和滑块,在杆6和滑块之间增加拉伸弹簧,使弹跳机构变为单自由度驱动。

图4 被动关节示意图
3 弹跳机构运动学和动力学分析
3.1 弹跳机构运动学方程的建立
采用D-H法建立机构的运动学方程,求解时将弹跳机构从A点分开,分为支链Ⅰ和支链Ⅱ分别求解,如图5所示。弹跳机构支链的D-H参数如表1所示。

(a)支链Ⅰ (b)支链Ⅱ

表1 支链的D-H参数
将表1的行代入位姿通式[20]中,可得弹跳机构支链Ⅰ的运动学模型:
式中,cθi=cosθi,sθi=sinθi。
同理得弹跳机构支链Ⅱ的运动学模型:
上述设计的弹跳机构是自由度为1的闭链齿轮-五杆机构,因此通过上述求解,给定AB杆的转角即可通过数值方法求解运动学方程,从而得到机构各点的运动学关系。
3.2 弹跳机构动力学方程的建立
考虑弹跳机构各杆件的运动,利用拉格朗日方程建立系统动力学方程。跗跖关节A处采用小型轻质弹簧起到被动关节的作用,而弹跳机构的弹跳力主要由CG间的储能弹簧产生,因此将被动关节处的弹簧及附加的滑块和杆HF省略以简化分析过程。如图6所示,假设杆1的质心位于B点,杆4的质心位于D点,杆2、杆3以及杆5的质心位于各杆中心,在起跳的瞬间,脚掌与地面接触且无相对滑动,夹角为零。

图6 弹跳机构起跳阶段机构原理图
弹跳过程中,各杆件运动包括质心平动和绕质心的转动,所以系统的动能为
(3)
式中,mi为杆件i的质量;vi为杆件i的质心平动速度;Ji为杆件i的转动惯量;ωi为杆件i的角速度;xi为杆件i的质心在X轴上的坐标;yi为杆件i的质心在Y轴上的坐标;li为杆件i的长度。
系统的主动力包括各杆件的重力和储能弹簧的弹性力,以脚掌所在的位置作为重力势能和弹性势能的零势面,则系统的势能函数可表示为
(4)
式中,k1为储能弹簧的刚度系数;x为储能弹簧的形变量。
设弹簧的原长为l0,则可得
(5)
式中,xC为C点在X轴上的坐标;xG为G点在X轴上的坐标;yC为C点在Y轴上的坐标;yG为G点在Y轴上的坐标。
由此可得出系统的拉格朗日函数:
(6)
根据图6可得起跳阶段各杆位姿方程:
(7)
(8)
由图6角度关系又可知:
θ01′=θ01+γ
(9)
因此,结合式(7)、式(8)和式(9)可得θ01和θ12均为θ34的函数:
(10)
(11)
根据拉氏方程可得弹跳机构的运动微分方程:
(12)
式中,S(·)为广义坐标系θ34下的函数。
给定初值,结合运动学分析相关结论,即可对上式进行求解。
4 弹跳机构的运动仿真实验
4.1 弹跳机构三维模型的建立
跳跃是一个爆发性运动,需要在短时间内释放力并产生加速度,因此如何实现系统的储能与释放成为弹跳机构设计的关键。如图7所示,CG间的弹簧k1为弹跳机构的主要储能元件,为实现弹簧的储能,将与杆3固连的齿轮3a作为主动齿轮,当电机通过传动系统驱动齿轮3a沿逆时针方向转动时,与其啮合的齿轮5a同步沿顺时针方向转动,弹簧k1被拉伸,从而储存能量。为实现能量的释放,设计了棘轮棘爪装置。图中5b是与齿轮5a固连的棘轮,杆4b连接在躯干4上,棘爪4a连接在杆4b上,在扭簧k3的作用下与棘轮5b啮合,此时齿轮的相对运动被锁定,即髋关节D被锁定,腿部结构的伸展受到限制。当凸轮7拨动杆4b从而使棘爪4a与棘轮5b脱开时,齿轮处于自由状态,髋关节D变为自由关节,弹簧k1收缩,能量释放。利用上述机构,驱动齿轮完成能量的储存,操纵棘轮棘爪完成运动的锁定和释放,同时通过脚部被动关节的设计,实现落地缓冲并储能部分能量。

图7 弹跳机构结构简图
根据上述运动原理,利用Unigraphics 8.0三维建模软件对弹跳机构的各部件进行详细设计,通过电子样机装配得到完成的仿鸟腿弹跳机构模型,如图8所示。

图8 仿鸟腿弹跳机构模型
根据鸟类后肢骨骼结构尺寸比例及“信鸽”扑翼飞行器尺寸,对弹跳机构各杆件的尺寸进行设计得:l1=68mm,l1′=110 mm,l2=102 mm,l3=67 mm,l4=24 mm,l5=78 mm,γ=9°,两脚之间的距离为48 mm,利用建立的三维模型可测得弹跳机构的质量为90 g。
在实际使用过程中,通过调节扑翼飞行器平台与弹跳机构的安装角度,使得飞行器扑动翼与来流速度夹角接近零,从而减小起飞阻力,通过对电池位置的调节来调节系统重心。将弹跳机构与扑翼飞行器平台进行装配,最终得到的弹跳起飞扑翼飞行器系统如图9所示。

图9 弹跳起飞扑翼飞行器系统示意图
弹跳起飞时,弹跳机构触发,使飞行器系统达到起飞条件(起飞速度vmin=7.9 m/s,起飞高度hmin=0.12 m),扑动翼随即以最大频率扑动,产生飞行所需的升力和推力,控制系统通过尾翼调节飞行姿态,从而承接后续的飞行运动。在进行弹跳机构的能量计算时,仅考虑弹跳起飞阶段。由“信鸽”扑翼飞行器不扑动定常状态下的阻力响应面模型[21]可得,迎角为零时,在该阶段系统阻力做功相比于动能可以忽略,因此弹跳机构最少需要提供的能量(弹跳机构的能量转换率η一般为50%~70%[22])为
(13)
式中,m为弹跳起飞扑翼飞行器系统起飞质量。
弹簧的刚度系数
(14)
式中,G为弹簧线材的切变模量;d为弹簧线径;Nc为有效圈数;Dm为弹簧中径。
通过计算可得,弹簧线径为2 mm,外径为10 mm,有效圈数为40,刚度系数k=7 715 N/m,取两根该弹簧并联即可满足弹跳机构的能量需求。
4.2 基于ADAMS的仿真分析
采用ADAMS对模型弹跳起飞过程进行仿真分析,将仿鸟扑翼飞行器平台简化为集中载荷,用质量为0.18 kg的小球代替,小球的重心离弹跳机构髋关节D点的水平距离为35 mm。图10所示为弹跳机构在ADAMS中离地时刻的运动仿真状态。

图10 离地时刻弹跳机构运动仿真状态
由弹跳-扑翼动态过程分析可得,在实际过程中,弹跳运动发生后,当扑翼飞行器被弹射到安全高度并加速到起飞速度时,扑翼驱动机构即开始扑动承接弹跳运动,因此在对弹跳过程分析时,只取初始的一段时间。
如图11所示,当弹跳机构触发后,储能弹簧收缩,连杆机构开始运动,随着弹簧力的减小,弹簧的弹性势能逐渐转换为仿鸟扑翼飞行器系统的重力势能和动能。0.0212 s时,弹簧恢复原长,弹簧力减小为零,但由于弹跳机构脚掌与地面还未脱离且接触力大于零,因此系统仍在加速,而由于惯性力的作用,弹簧开始收缩,各关节角度继续增大;0.0224 s时,弹跳机构脚掌与地面脱离,接触力变为零,系统质心速度达到最大值8.4 m/s,系统质心高度为0.13 m,此时仿鸟扑翼飞行器系统具备起飞条件;0.0241 s时,在惯性力的作用下,弹簧达到最大压缩长度,各关节的角度达到最大值。此外,从仿真结果中可以看出,关节E和关节D、关节B和关节G的角度变化规律及数值大小一致,这与上文机构运动学和动力学分析结果一致,表明了仿真结果的正确性。
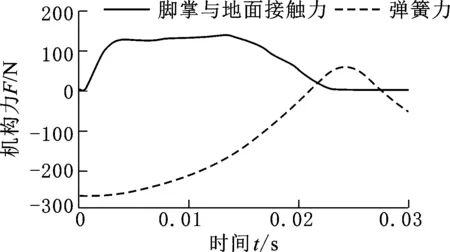
(a)机构力变化曲线
由上述分析可以得出,本文依据仿生学原理设计的弹跳机构具备良好的弹跳性能,通过对储能弹簧的加载,使扑翼飞行器具备一定的弹跳起降能力,推动了扑翼飞行器走向实际应用。
5 结论
本文以扑翼飞行器跳跃起飞为目标,基于仿生学原理,开展了仿生弹跳机构的概念设计研究:
(1)分析了鸟类跳跃起飞典型的运动状态/姿势,设计了扑翼飞行器弹跳起飞动态过程。
(2)设计了闭链齿轮-五杆仿鸟腿弹跳机构,并给出了其运动学、动力学模型。
(3)建立了弹跳机构三维模型,仿真结果显示,借助设计的仿生弹跳机构,扑翼飞行器系统质心速度达到8.4 m/s,大于“信鸽”起飞所需的速度7.9 m/s,具备弹跳起飞的可能性。
