船用海水淡化装置自动控制系统的研制
2022-08-17林文城
林文城
船用海水淡化装置自动控制系统的研制
林文城
(厦门海洋职业技术学院,福建厦门 361012)
为了减轻Desalt JWP-26-C系列船用海水淡化装置的运行管理压力,开发出基于PLC的装置自动控制系统。以控制装置的产水量为例,在环境条件或结构性能变化时,该自动控制系统采集数据和PID运算后,产生PWM输出信号,控制电液比例流量阀的动作,来调节加热水流量,确保装置的产水量维持在初始值上。该控制系统提升该系列装置的响应速度和控制精度,可以考虑在其它船用海水淡化装置上推广应用。
船用海水淡化装置 PLC PWM
0 引言
为了提高续航能力和经济效益,远洋船舶上必须配备海水淡化装置。船用海水淡化装置利用蒸馏法将海水淡化后,生产含盐量合格的淡水,不仅提供动力设备冷却水和锅炉补给水等,还要满足船员生活用水的需求。基于废热合理利用和控制蒸馏器水垢等综合因素,船用海水淡化装置一般采纳高真空低沸点的设计思路,即在柴油机缸套冷却水(以下简称加热水)加热下,海水在较低的温度下汽化沸腾,再将产生的水蒸气进行冷凝后获得蒸馏水,整个装置包含海水系统、抽真空系统、给水系统、加热系统、冷凝系统、凝水系统和投药系统等[1]。以Alfa Laval公司生产的Desalt JWP-26-C80为例,设计真空度为93%,蒸发温度为40℃,加热水的温度为60~90℃,淡水产量为625 L/h,产水含盐量要求低于2 mg/L。在装置运行的过程中,发现系统最重要两个输出技术指标(所造淡水产量和含盐量)一直在波动着,分析其中的原因,是系统工作条件发生变化或者出现异常状况,但因装置结构复杂,各技术参数值多且相互影响,技术人员无法实时做出准确的决断和采取有效的措施,增加了装置运行管理和故障排除的难度;另一个方面是装置缺乏随着外在因素变化而自动调节的能力,无法给船舶其它设备提供水质和水量均恒定的淡水资源。
基于以上存在的不足,开发一套适用于Desalt JWP-26-C80的自动控制系统,利用PLC计算精度高,响应速度快,抗干扰能力强和性能稳定可靠等的优点,来实时分析该船用海水淡化装置的运行状态,针对性调整工作参数,来适应外界条件的变化和其它设备的需求,同时适时发出故障报警信号,及时提示技术人员采取准确排除措施,减轻系统运行中维护管理的压力。

图1 船用海水淡化装置自动控制系统硬件简图
1 自动控制系统的硬件组成
在装置海水泵、喷射泵和凝水泵等动力设备正常工作的前提下,为了确保生产水质合格和产水量稳定的淡水,最重要的运行管理工作是合理控制装置的海水给水量、加热水流量、冷凝水流量和凝水流量等。如图1所示,控制系统的下位机采用西门子S7系列控制器,通过传感器、电开关和电磁阀等元件采集装置运行过程中的技术参数数值,经过输入接口的模数转换,将数字信号传送给PLC,PLC数据运算后,产生输出信号控制各执行元件的动作,自动调整装置技术参数的数值,从而实现系统输出水质合格和水量恒定的淡水。另外,选择TD200触摸屏作为上位机,借助编程器来实现与下位机的连接,建立人机交互,实时监控和调节装置技术参数,以便于装置更好地服务于其它动力设备的运行和船员的生活。
2 自动控制系统的设计思路
依据装置的性能特点以及动力设备的运行状况,来设定船用海水淡化装置的所造淡水的含盐量和产水量等参数的初始值。通过采集海水温度、海水流量和加热水温度等数值,经过PLC控制器的运算处理,输出电信号控制电液比例阀等执行元件,来实时调节蒸馏器的给水量、冷凝水的流量和加热水的流量,确保装置平稳运行。因篇幅所限,下面就以控制装置产水量这一技术参数数值为例,来阐述本控制系统的设计思路。影响产水量的因素很多,但装置主要以控制加热水的流量来调节产水量的,当产水量与设定的初始值存在偏差时,PLC输出信号,控制电液比例阀动作来调节加热水的流量,使装置的产水量偏差为0,周期性启动测试-计算-调节的工作循环,确保产水量数值的恒定;当因恶劣环境条件或装置故障,导致产水量偏差无法消除的时候,控制系统将及时发出报警信号,提示技术人员重新设定初始值或者采取针对性措施排除故障。
3 自动控制系统的软件设计
基于Desalt JWP-26-C80的结构组成以及外界的环境条件,自动控制系统的程序开发,选择编程软件STEP7和组态王,分别来完成下位机控制程序的设计思路和满足上位机监控界面的总体要求。
3.1 下位机控制程序的设计
在装置运行的过程中,给水温度和流量、真空度(海水沸点)、加热水温度和流量、冷凝水温度和流量、凝水流量、蒸馏器换热能力和密封性能等因素,都将影响装置产水量数值的变化。设定这些影响因素在合理变化区间,当控制系统检测某些因素超出设定范围,将提示环境条件恶化或装置处于异常工作状态。另一方面,装置在正常工作状态下,加热水的热值,是蒸馏器主要的能量来源,直接决定了装置的蒸气量(即产水量),故控制系统只要控制加热水的流量,即可在设定的范围内保证产水量的恒定。
利用传感器等输入元件采集装置运行的各技术参数值,模数转换结束,由控制系统确认装置的工作条件和运行状况处于正常状态。如图2所示,由流量传感器测量装置实际的产水量,计算与设定产水量初始值的偏差值e,PLC根据偏差值e的结果生成数字脉冲信号,该电信号输出并作用在加热水的电液比例阀上。电液比例阀阀芯的位移,取决于输入电信号的大小,故应用PLC输出电信号的大小,来实时调节加热水的流量,同时借助反馈信号进一步修正,消除装置产水量的偏差值。
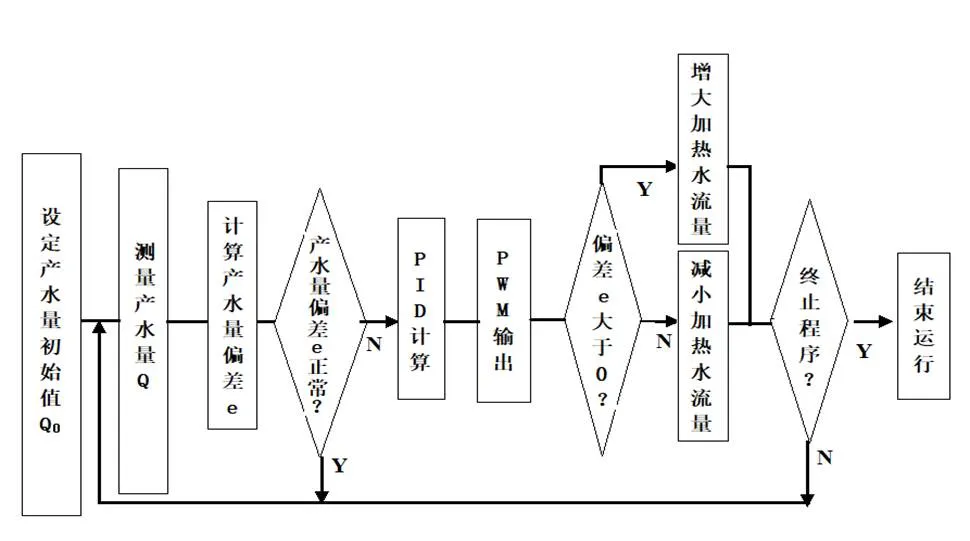
图2 船用海水淡化装置自动控制系统流程图
4.1.1数据采集
依据下位机的设计思路,在设定的周期内,监测装置各个技术参数的数值和所有元件的开关量,比如海水温度和流量、加热水温度和流量、凝水流量和含盐量等,将这些模拟量经过转换后,传送给PLC控制器。另外,根据船舶所处的纬度、柴油机的工作负荷和装置的运行状况等,技术人员可以在上位机上及时调整相关参数的数值,提高下位机控制系统运行可靠性。
4.1.2安全保护
首先,蒸馏器内真空度过低时,换热面结垢严重;而真空度过高时,所造淡水含盐量超标不符合要求。其次,盐度计报警设备失效,将导致所造淡水不合格,直接缩短辅锅炉的使用寿命。另外,要确保装置的密封性能,包含要防止海水倒灌进蒸馏器或漏入冷凝器。最后,检测各水泵和喷射泵是否处于正常状况。综上所述,在装置运行过程中,自动控制系统要设置蒸馏器压力异常保护、所产淡水含盐量超标保护、止回阀失效保护和泵吸排压力差过低保护等。
4.1.3 PID运算
为了保证装置产水量数值的基本恒定,采用PLC闭环控制系统,定期检测实际产水量,进行PID运算调节,实现该技术参数的高精度同步跟踪修正性能。如图3所示。实时采集产水量数值C(),该信号转换后输出测量值Q(),PLC接收并完成PID运算,产生测量值Q()和设定值SQ()的偏差e()。为了消减测量值Q()的偏差,PLC输出M()信号,该信号放大后作用在电液比例流量阀上,根据比例电磁铁的位移与输入电流信号的大小和方向成正比的性质,M(t)信号控制滑阀的阀芯连续运动,合理调节加热水流量的大小,来获得符合要求的产水量C(t),经过不断循环调整控制,确保装置实际产水量维持在设定的数值上。

图3 船用海水淡化装置自动控制系统负反馈系统图
输出信号()与产水量偏差()的关系式为:

式(1)中:()-PID输出值;K-比例控制增益;()-产水量偏差值;T-积分时间常数;T-微分时间常数;0-PID初始值。根据装置的外在条件和性能特点,选择模拟量和开关量等数据的采集周期,从而离散化PID输入输出关系公式,最终获得系统采集第n次数据时的输出公式为:

式(2)中:()-第n次采样时PID输出;-数据采集周期;-数据采集次数,=1,2,3……;e()-第次数据采集时的长水量偏差。
4.1.4 PWM输出
在船用海水淡化装置自动控制系统中,PIC控制器根据产水量的实际偏差值进行PID运算,输出不同占空比的PWM控制信号。该PWM控制信号在完成放大并转换之后,成为脉冲电流信号来控制电液比例流量阀阀芯的动作。脉冲电流信号的强弱,决定了阀芯相对于阀体的轴向位移(即阀口的轴向开度)的大小,也就控制了加热水的流量变化。装置产水量的实际数值不断接近设定值,PWM控制信号的强度也随着不断衰减,加热水的流量也就稳定在响应的某一数值上,这样来达到产水量输出稳定的要求,实现了控制系统的设计目的。
4.2 上位机控制程序的设计
TD200触摸屏选择组态王软件进行编程,建立船用海水淡化装置自动控制系统的人机交互界面。在上位机上,实时显示装置模拟量和开关量的数值,为技术人员的日常设备管理工作提供依据;同时根据环境条件的变化和其它设备的需求,及时提示技术人员调节相关技术参数的设定值。
5 小结
在船龄较大的部分远洋商船上,还服役着Desalt JWP-26-C系列型号的海水淡化装置,研制基于PLC的自动控制系统,为改善这些装置的性能特点和维护管理很有裨益。装置运行过程中,某些技术参数改变时,自动控制系统将发挥快速响应作用,自动采取合理措施,及时消除稳态偏差,并超前补偿控制环节的滞后,保证装置长时间处于安全稳定高效的运转状态。
[1] 陈海泉. 船舶辅机[M]. 大连: 大连海事大学出版社, 2016.
[2] 李哲. 船用海水淡化装置设计实例与运行测试[J]. 工业水处理,2018(8):105-108.
[3] 苏闯建, 田中轩, 熊云. 船用海水淡化装置的产水水质特性及经济性分析[J].化工进展, 2018(2):796-802.
[4] 陈旸. 基于高压反渗透方式的船用海水淡化装置研究[J].机电设备, 2015, (S1):49-51.
[5] 胡钰, 魏林瑞, 张磊, 卢素敏. 10t/d船用板式蒸馏海水淡化装置性能测试与模拟计算[J].工业用水与废水, 2016(3):78-83.
Development of automatic control system for marine desalination plant
Lin Wencheng
(Xiamen Marine Vocational and Technical College, Xiamen 361012, China)
P747
A
1003-4862(2022)08-0039-04
2022-02-16
林文城(1975-),男,副教授。研究方向:船舶辅机自动控制和维护管理等。E-mail: jiayiyuanxinyueyuan@126.com