温室灌溉控制策略研究进展*
2022-08-17代志伟程曼袁洪波蔡振江
代志伟,程曼,袁洪波,蔡振江
(河北农业大学机电工程学院,河北保定,071001)
0 引言
目前水资源短缺已经成为一个全球性的危机问题[1],其中用于农业灌溉的用水量约占全部生产生活总用水量的70%[2],因此,改善灌溉方式和改进灌溉控制方法对于环境水资源短缺具有重要的意义。在农业生产中,设施农业占据了重要的地位,截止到2020年,我国设施园艺面积已从31.6 khm2发展到目前4 100 khm2。温室作为设施园艺生产的重要形式,对于整个设施园艺产业的发展起着重要的影响作用。灌溉是温室生产中不可或缺的一环,它对蔬菜等作物的生长发育、产量起着关键作用[3]。
温室生产过程中需要消耗大量的灌溉用水,合理的灌溉控制方法可以有效的降低用水量,提高用水效率,节约水资源[4]。目前,我国温室生产过程中多数仍采用传统灌溉方式,不能根据实际情况进行“按需供水”,不但造成了水资源的浪费,作物产量和质量的提高也极大地受到了制约[5-6]。近些年来,我国在农业节水方面做了大量工作,也取得了显著成绩,但是在温室灌溉控制策略方面仍存在一些问题需进行深入研究。如何根据需水量进行精准灌溉是当前温室灌溉的一个核心研究内容,围绕这一目标,国内外学者进行了大量的研究。本文从基于蒸腾模型、基于土壤/基质传感器、基于作物形态和生理特性参数角度对当前温室灌溉控制策略进行了分析和讨论,并进行了总结和展望。
1 基于蒸腾模型的灌溉控制策略
在土壤—植物—大气连续体(Soil-Plant-Atmosphere Continuum,SPAC)系统中,水分的循环是一个连续的过程,在这一过程中水分呈现出一个液态—气态—液态/固态的动态变化形式。与露天栽培可以通过降水补充水分不同,温室中水分的供给全部来自于灌溉。理论上通过评估水分的消耗就可以计算出灌溉所需用水量。在温室中水分消耗的主要形式有植物蒸腾、土壤蒸发以及深层渗漏,其中大部分水分的消耗通过蒸腾作用实现,且随着植株的生长发育所占比重越来越大。因此,可以通过估算植物蒸腾量来计算灌溉用水量和灌溉时间[7],以及制定出相应的灌溉策略[8-10]。
近年来,研究人员已经开发出了多种蒸腾模型用于灌溉控制策略的制定,这些模型大部分都是基于联合国粮食及农业组织(The Food and Agriculture Organization, FAO)提出的参考蒸腾量计算公式,即Penman-Monteith(P-M)公式[11],如式(1)所示。
(1)
式中:ET0——参考蒸腾量(mm/day),即当作物高度为0.12 m时,并有固定的地表阻力70 s/m,反射率为0.23,土壤水分供应充足条件下假想的作物冠层蒸发腾发量;
Rn——作物表面净辐射量,MJ/(m2·day);
G——土壤热通量,MJ/(m2·day);
γ——湿度计常数,kPa/℃;
T——地面上2 m高处空气平均温度, ℃;
u2——地面上2 m高处风速,m/s;
es——空气饱和水汽压,kPa;
ea——空气实际水汽压,kPa;
Δ——空气实际水汽压与空气温度关系曲线斜率,kPa/℃。
实际蒸腾量的可以在ET0的基础上结合作物系数Kc计算得到,作物系数的计算方法分为两种:单作物系数法和双作物系数法,分别如式(2)和式(3)所示。
ETc=Kc·ET0
(2)
ETc=(Ke+Kcb)·ET0
(3)
式中:ETc——实际蒸腾量;
Kc——综合作物系数;
Kcb——基础作物系数;
Ke——土壤蒸发系数。
通过研究表明ETc可分为植物蒸腾(Tr)和土壤蒸发(Eg),其中Tr与植物生长密切相关,而Eg被认为是无效耗水,因此准确模拟温室Tr和Eg将对温室作物的精确灌溉十分重要[12]。作物系数与作物品种、种植区域、以及作物相关生理参数等有关,需要根据实际应用情况进行确定。在单作物系数法中,将植物蒸腾和土壤蒸发统一考虑;而在双作物系数中分别考虑了两者的不同,并将作物系数分为Kcb和Ke。樊引琴[13]和卢晓鹏[14]分别对FAO-56推荐的双作物系数法和单作物系数法进行了比较试验,试验结果一致表明当地面部分覆盖较多时,双作物系数法更接近实测值,当完全覆盖时,两者差异不大。另外,对于土壤蒸发和植物蒸腾模拟的常用方法除了FAO-56中的双重作物系数(Dual-Kc)方法还有Shuttleworth-Wallace(S-W)模型。为了验证这两种模型在温室栽培条件下的适用性,龚雪文[15]和Huang[16]分别针对温室番茄和温室黄瓜进行了试验,结果表明这两种模型可以用于温室作物的蒸腾量评估。Gong等[17]针对日光温室番茄栽培,分别用S-W和Dual-Kc模型估算蒸散量,试验结果表明用Dual-Kc方法制定灌溉制度更简便。
P-M公式针对的是露地种植情况,由于温室的特有结构导致其与露地种植存在较大的差异,所以需要根据实际情况对P-M公式进行修正才能使用。在温室中由于风速较低,赵颖等[11]利用实时采集的温室环境参数,通过消除风速的方法修正了P-M公式计算了番茄作物每个生长期的蒸腾量,以此为基础进行灌溉用水量的确定,并制定了滴灌条件下的灌溉控制策略。刘浩等[18]以P-M公式为基础,利用温室条件下的空气动力学阻力(Aerodynamics resistance,ra)计算方法对风速的计算方法进行了改进,通过分析作物系数与积温的关系,构建了基于常规气象资料的滴灌条件下温室番茄需水量估算模型;并且在此研究对ra修正的基础上,同时对作物冠层阻力(Canopy resistance,rc)进行了修正,得到一个只需常规气象数据、番茄叶面积指数(LAI)和冠层高度就能对日光温室番茄的蒸腾量进行计算[19]。罗卫红等[20]在P-M模型中应用rc和ra特征值来计算蒸腾量,当其分别为100 s/m和600 s/m能够较好地模拟Venlo型温室冬季黄瓜的蒸腾,但所得的特征值是否适用于其他温室作物有待进一步研究。有研究表明采用ra为定值295 s/m 的P-M法可较好地估算温室ET0。闫浩芳等[21]根据温室内实测微气象因子、叶面积指数及土壤水分数据对FAO-56推荐的双作物系数中的Kcb、Ke进行修正,并且取空气动力学阻力为109.40 s/m对P-M 模型进行修正,进而估算Venlo型温室黄瓜蒸发蒸腾量和植株蒸腾。高温和光照会造成温室内饱和水汽压差(VPD)的亏缺,特别是在夏季炎热的干旱条件下,这一现象更加明显。Jo[22]等构建了补偿辐射(Rad)和VPD的P-M修正模型,并将其用于温室番茄无土栽培精确灌溉的控制策略的制定,提高了灌溉控制的精度。
在P-M方程中作物叶片气孔阻抗这一参数不易计算,戴剑锋等[23]通过分析番茄叶片气孔阻抗与温室环境因子之间的关系与P-M方程结合后计算了春冬两季温室内番茄作物的累积蒸腾量。而针对P-M公式需要采集较多的环境参数且需要近似计算使得造成的蒸腾模型精度较低等问题,袁洪波等[24]利用灌溉量与排出量的差值和采集的温室环境参数建立了蒸腾模型,结合人工神经网络(ANN)算法实现了温室封闭式栽培智能灌溉控制。在确定黄瓜、番茄和辣椒的蒸散量的研究中,Eslamian等[25]采用了人工神经网络和遗传算法,用排水蒸渗仪估算参考蒸散量,结果表明,两种模型与作物实际蒸散量吻合较好,但遗传神经网络模型比神经网络模型响应更好。
综上所述,基于蒸腾模型制定灌溉控制策略在灌溉控制中应用较多,不同的蒸腾模型具有不同的特点,表1为各种不同蒸腾模型的比较。

表1 用于制定灌溉控制策略的不同蒸腾模型的比较Tab. 1 Comparison of different transpiration models used to formulate irrigation control strategies
在基于蒸腾模型的灌溉控制策略制定中,蒸腾模型的准确性直接影响灌溉控制质量,这就需要对一些模型所需要的参数进行实时的测量,而有些参数是难以实时准确的测量,这给蒸腾模型的构建带来了一些困难。此外,在根据蒸腾模型计算水分消耗时,也需要考虑温室的结构、作物生长阶段及环境参数采集的难度等要求,以此为依据对蒸腾模型进行适当的简化。综上所述,植物蒸腾模型属于一种半理论半经验模型,不可避免的带有估算的因素,它只能反映出有多少水分被消耗,而不能精准的指示出土壤或基质内还有多少水分,是否能够满足作为生长需要。因此,基于蒸腾模型的灌溉控制策略能够评估出与初始状态相比有多少水分被消耗,可以以此为依据进行灌溉用水量的估算,难以直接确定灌溉行为执行的时间。
2 基于土壤传感器的灌溉控制策略
土壤中水分含量标志着其水分供给的能力,通过传感器对土壤中含水量进行检测能够计算出当前水分含量是否能够满足某一阶段作物生长用水量的需求,以此为依据并结合土壤持水能力不但可以确定灌溉用水量,还可以确定灌溉执行的时间。对于土壤含水量的检测一般利用传感器来实现,目前所用的传感器大致可以分为土壤湿度传感器和土壤基质势传感器。通过传感器可以监测土壤/基质的水分变化情况,并且据此做出客观的灌溉决策[26]。
2.1 基于土壤湿度传感器的灌溉控制策略
利用传感器感知的数据进行灌溉策略的制定,比定时灌溉具有更高的水分和养分综合利用率[27]。能够用于灌溉控制的土壤含水量一般是指利用烘干法在105 ℃~110 ℃温度下能从土壤中被驱逐出来的水分含量[28]。土壤含水量可以分为质量含水率和体积含水率两种表达形式。质量含水率是指土壤中水分含量与烘干后土壤质量的比例[29],如式(4)所示。
(4)
式中:θm——土壤质量含水率;
m1——湿土质量;
m2——烘干土质量。
体积含水率,又称容积含水率,是指土壤中水分容积与土壤总容积的比例,如式(5)所示。
(5)
式中:θv——土壤体积含水率;
Vw——土壤中水分容积;
Vs——土壤总容积。
其中质量含水率和体积含水率的关系可以用土壤容重P来表示,如式(6)所示。
(6)
目前土壤湿度传感器测量的一般为体积含水率,常见的传感器可以分为基于介电法和基于非介电法两种类型。
2.1.1 基于介电传感器的灌溉控制
介电法是利用电磁脉冲原理,根据电磁波在土壤中的传播特性来测试土壤的介电常数ε。土壤的介电系数约为4,空气的介电系数为1,而水的相对介电常数为78.5。由于水的介电常数远大于土壤和空气的介电常数,所以可以通过测量土壤的介电常数计算出为土壤的含水率[26]。当前常用的介电式传感器主要有时域反射(Time domain reflectometry, TDR)、频域反射(Frequency domain reflectometry, FDR)和电容式三种类型。
TDR的原理是通过测定电磁波在混合介质中的传播速度来测量土壤含水率[30]。20世纪80年代初,Topp等[31]应用TDR技术制造了第一套时域反射仪,并通过试验建立了土壤体积含水率与土壤介电常数之间关系式;试验结果表明介电常数只受土壤体积含水率影响,与土壤密度、类型和含盐量几乎无关,如式(7)所示。
θv=-5.3×10-2+2.92×10-2Ka-5.5×
10-4Ka2+4.3×10-6Ka3
(7)
式中:Ka——土壤的介电常数。
TDR法测量精度主要取决于土壤介电常数与土壤体积含水率之间的关系式是否准确,因此对于不同类型土壤,在使用前需要对传感器进行标定,以得到精准的介电常数与土壤体积含水率关系。
TDR传感器在自动灌溉领域得到了广泛的应用,李杰等[32]利用TDR法实时监测温室土壤的湿度,当其达到一定阈值时开启电磁阀,以实现温室作物的水分供给。
FDR的原理是利用电磁波在不同介质中振荡频率的变化来测定介质的介电常数,并据此计算出土壤的体积含水率[33],如式(8)所示。
(8)
其中a1,a0为常数,其根据土壤类型确定,可通过查阅相关文献获得土壤的典型测量值。
与TDR相比,FDR传感器成本较低,因此在温室的精准灌溉中得到了广泛的应用。韩晨燕等[33]基于FDR土壤湿度传感器设计了节水灌溉系统,设定的阈值来控制电磁阀的开启,实现节水灌溉的目的。宋志勇[34]设计了温室土壤水分监控系统,利用FDR传感器实现了对土壤水分的测量。FDR传感器还可以用来测量基质中的体积含水量和电导率(EC),为无土栽培实时感知水分和EC的变化提供了良好的工具[35-36]。FDR传感器使用前,也需要进行校准[37-38],而且进行长时间或季节性土壤体积含水率变化监测时,需要对测量结果进行适当的温度校正[39]。
电容式土壤水分传感器的测量原理与FDR类似,但是它使用固定频率而不是扫频频率来检测,并通过测量其标准波的频率变化来反演土壤含水率[39]。当土壤水分变化时其介电常数也会发生变化,因此不同的含水率导致其产生不同的电容值,电容的变化又导致电压的变化,传感器可以通过测量的电压变化来推算土壤含水率[40],如式(9)所示。
(9)
式中:R——传感器电阻;
ξ——探针的几何因子;
t——时间;
V——方波激励信号的高电平值;
Uc——传感器探针上测量的电压信号。
电容式传感器测量土壤含水率时会受到土壤电导的影响,这种影响与测量时使用的频率有关,频率越高受影响越小。但是提高电磁波发生频率会增加电路的设计难度,李加念等[40]结合真有效值检测技术设计了一个高频电容式土壤水分传感器有效地解决了这个问题。电容式传感器在温室土壤/基质含水率检测中也到了应用,An等[41]为了比较不同栽培基质下兰花的水分利用效率,使用EC-5型电容式湿度传感器进行了检测。谭燕等[42]利用电容式YL-69型传感器检测土壤湿度,建立灌溉量与土壤湿度的数学模型,并通过模糊控制实现了对温室作物的智能灌溉控制。Ferrarezi等[43]使用电容式土壤水分传感器来监测体积含水量(VWC),并结合开源控制器基于灌溉阈值来控制灌溉。电容式传感器成本相对较低,且易于在各种环境中进行安装和使用,在设施园艺中也得到了不少的应用。
2.1.2 基于非介电传感器的灌溉控制
土壤是一个包含固、液、气三相的混合体,其中的矿物质可以溶于水形成能导电的电解离子,利用这种导电性可以测量土壤的电阻率。土壤电阻率会受到土壤成分以及含水量的影响,在同一土壤类型下主要受含水量的影响,因此可以通过测量土壤阻值的大小来推算出土壤含水量[44],如式(10)所示。
(10)
式中:ρ——土壤电导率;
c1——土壤中导电离子浓度;
c2——土壤含水量。
基于介电法的传感器虽然测量精度高,但是电路复杂导致成本也相对较高。基于电阻法的土壤湿度传感器结构简单成本低,能够在一定范围内精确地测量土壤含水情况。伍群芳等[45]结合单片机研制了一种土壤含水量传感器交流阻测量仪,可以精确可靠的实时测量土壤湿度。赵强[46]采用了FC-28型土壤湿度传感器来测量土壤的湿度,该传感器有两根极柱,两极柱间的土壤相当于一个电阻,通过阻值的不同来判断土壤湿度。Rao[47]和Kothawade等[48]使用电阻式土壤水分传感器实时监测土壤水分,分别设计了基于树莓派的温室智能灌溉监测系统。
表2所示为不同类型土壤水分传感器的对比。不管何种类型传感器,在使用之间一般都需要进行标定以实现精准测量。此外,土壤水分传感器在长期使用过程中,也会存在一定的漂移现象,需要进行定期的校准。

表2 几种常见土壤湿度传感器对比Tab. 2 Comparison of several common soil moisture sensors
2.2 基于基质势传感器的灌溉控制策略
土壤湿度表征的是土壤中含有多少水,但是这些水并不能够完全被植物吸收,只有有效水才能够被吸收。有效水指的是可以储存在土壤中并可供植物使用的水分,而不是土壤中含有的全部水分。因此,湿度并不能反映出土壤水分对植物的有效性,而研究发现土壤基质势则具有更广泛的适用性[49]。土壤基质势是在土壤基质的吸附作用下,土壤水较自由水降低的势能[50],它与土壤类型、成分和土壤含水量等有着密切的关系,可以精确的反映土壤水分的变化。当植物根系的水势低于土壤的水势,就可以从土壤中汲取水分[51]。大量的研究表明,利用土壤基质势可以及时评估土壤和植物的水分状况,然后制定适当的灌溉策略。
土壤基质势常用检测传感器是土壤水分张力计。杜太行等[52]采用自主设计的无线土壤水势测量仪,结合模糊控制控制电磁阀设计了设施蔬菜智能灌溉控制系统。Contreras等[53]通过电子张力计检测土壤基质势变化,并根据不同阈值制定自动化灌溉控制策略,其研究结果表明土壤基质势阈值为25 kPa时,水分和养分的利用效率最高。基质和土壤在理化特性上存在明显的差异,这些差异导致土壤栽培条件下对于水分蒸发和水分监测的方法和结果不能直接用于基质栽培中。在基质栽培条件下,Montesano等[54]利用张力计检测基质水势,并分析了番茄的生长、产量、果实品质和水分利用效率之间的关系。
综上所述,在温室生产过程中,利用传感器监测土壤/基质的水分变化情况,并据此作出客观的灌溉决策的方法已经得到了快速的推广和应用。相比于传统方法它们直观的反映了土壤中水分的变化,相对于蒸腾模型具有更准确且操作简单,需要其它类型的传感器数量少等优点。但是应用土壤传感器进行灌溉决策也存在一些需要注意的问题,其中传感器部署数量和位置最为关键,直接影响到水分状态评估的精确性;其次,传感器的测量精度对于灌溉决策的精准性影响较大,在使用前需要进行校准来保证测量的精度,而且由于长时间使用会发生漂移导致需要定期的维护等。
3 基于作物特性的灌溉控制策略
灌溉控制策略中,不管是基于蒸腾模型还是土壤传感器,都属于利用间接参数去评估植物的需水情况,这些都难以真正的反映植物本身的水分状况。相关研究表明,植物自身水分状况与其作物特性,如叶茎水势、茎直径变化、茎体水分、以及冠层温度等有很大的关系。因此对这些参数进行检测可以直接、准确的确定植物体内水分的状况[55]。当前对于植物特性进行检测的方法大致可以分为两类:基于形态指标的检测方法,如茎直径变化和叶片形态信息等;基于生理指标的检测方法,如叶茎水势、气孔导度以及冠层温度等。
3.1 基于作物形态变化特性的灌溉控制策略
植物的水分状况可以通过其局部形态变化来表征,从微观来看,植物细胞形态的膨胀和收缩表征含水量的变化,从宏观角度来看,可以通过监测叶态变化和茎干变化等来表征含水量的多少,因此产生了不同的检测方法。其中叶态变化是植物体内细胞水分含量变化的外在表现,其与植物体内的水分状况有着密切的联系。张新[56]利用植物叶态萎蔫作为观测指标,通过基于3D机器视觉进行图像处理的方法来判断植物是否缺水。Seelig等[57]利用高精度电距离传感器对温室豇豆叶片厚度进行测量,并把叶片厚度作为植物指导灌溉的指标,通过与定时灌溉策略的对比,该方法可以节约25%~45%的用水量。当植物体内水分减少时会导致茎干直径收缩,补充水分后茎干直径能够恢复正常,因此可以利用茎干直径的微变化为作物精准灌溉提供参考指标[58]。目前主要利用茎的最大日收缩量(MDS)、日增加量(DI)及茎差(SD)等参数来指导灌溉。雷水玲等[59]通过相关分析方法对温室内黄瓜和番茄的茎差、饱和水汽压差以及基质含水率进行了相关分析,得出茎差变化与作物的水分的关系。Guo[60]对温室中栽培的葡萄茎直径变化进行了研究,发现与其它参数相比,MDS和DI具有更高的灵敏度和信号强,能够更加精确地监测葡萄的水分状况。
3.2 基于作物生理特性的灌溉控制策略
由于茎部几何参数的测量精度要求相对较高,叶片成为了植物各部位反映植物水分亏缺比较理想的部位[61]。刘德慧[62]分别利用叶水势、气孔导度和叶—气温差来检测作物的缺水情况并进行了试验,试验结果表明这三个参数都能够用于指导温室黄瓜的水肥亏缺诊断。鲍一丹等[63]利用叶片电特性和叶水势对玉米水分亏缺情况进行监测,研究表明叶片电容比叶水势测量更简便,其受环境影响比较小,为快速准确得获取植物缺水信息提供了一种新方法。植物的冠层温度是指植物不同高度叶片温度的平均值,Kim等[64]利用热红外测温仪检测温室黄瓜的冠层温度,并验证了冠层温度与不同灌溉策略之间存在关系。
综上所述,植物水分状况与其形态变化特性、生理特性密切相关,因此,可以用植物形态指标和生理指标定量地表征植物水分状况。目前的检测技术各有优劣,但是测量这些指标的方法大多具有一定的破坏性,有些生理指标的测量耗时费力而且难以实现自动化连续实时监测。因此需要开发出精确度更高并能连续自动检测的传感器,为精准灌溉提供更加准确的参考指标。表3所示为用于植物形态及生理特性检测的不同指标特点对比。
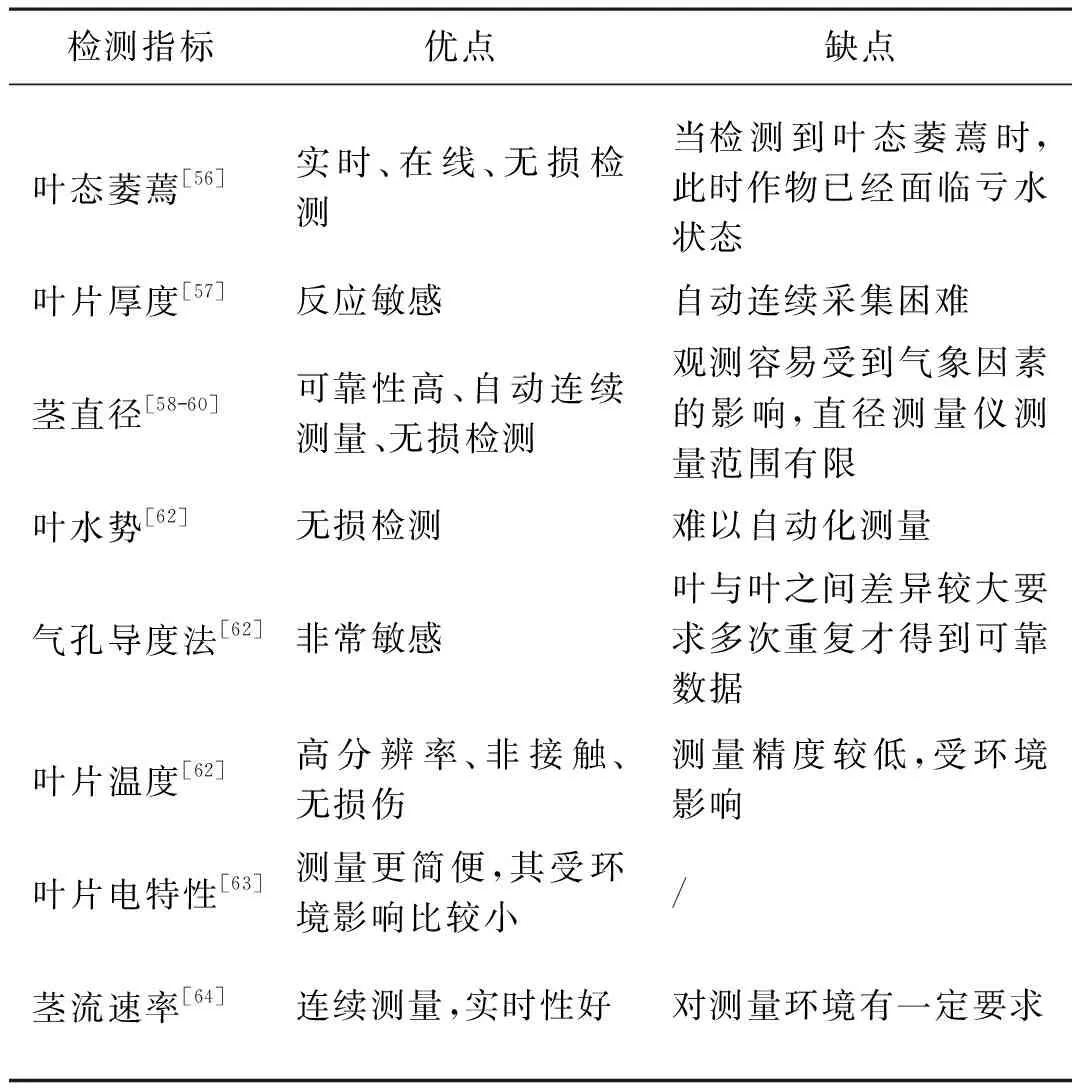
表3 用于植物形态及生理特性检测的不同指标特点对比Tab. 3 Comparison of different indexes for the detection of plant morphological and physiological characteristics
4 总结与展望
利用作物蒸腾模型、土壤/基质传感器和植物特性参数是当前温室灌溉控制策略制定的三种常用方法。近年来,随着政策的导向和技术的发展,温室节水灌溉已经逐步得到推广,相应的灌溉技术和灌溉设施也逐渐得到广泛的应用。但是当前温室灌溉控制的应用现状与灌溉控制策略的发展还不相匹配,还存在以下问题。
1) 灌溉控制策略的融合度不足。当前的灌溉控制策略多数以单一模型或者单一传感器数据作为参考,没有将不同的模型、方法和传感器数据有效的进行融合来共同制定灌溉策略。如何利用多种模型和不同类型传感器数据精准的计算作物实际需水量和当前土壤/基质的含水量,并以此为基础进行精确的按需供给是灌溉控制策略未来的研究方向之一。
2) 灌溉控制策略与灌溉控制装备的匹配度不足。当前对于灌溉控制策略的研究领先于灌溉控制装备的研究,先进的灌溉控制策略如何实现是当前温室灌溉领域中的一个现实问题。受成本的制约,我国现代化、智能化温室普及率相对较低,简易的塑料大棚和日光温室约占我国温室总量的60%以上[65]。这些温室内灌溉及环境调控装备自动化程度较低,难以实现精准的自动化控制和管理。而现有的很多灌溉控制策略是建立在温室环境信息的全面获取和灌溉行为的精准调控基础之上,配套传感器及装备的缺乏和相对较高的价格是制约灌溉控制策略实施的主要困难之一。
3) 灌溉控制策略的泛化性和普适性不足。当前多种温室灌溉控制策略都是基于某种特定类型温室得到的,在泛化性方面存在适应度的问题。我国实际生产中的温室类型多种多样,特定试验环境下得到的控制策略如何泛化是灌溉控制策略的关键。此外,现有的灌溉控制策略的在使用过程中,需要进行模型的修正、简化和参数设定等一系列的操作,这都要求操作者需要具备一定的专业背景。但是进行实际温室生产的用户往往缺乏相关的知识和经验,这也限制了灌溉控制策略的推广应用。如何减少人工干预的需求,提高灌溉控制的智能化是未来的发展方向之一。
综上所述,目前基于湿度传感器的节水灌溉策略由于其更具普适性、简便性以及更加自动化应用的最为广泛,而基于作物特性的灌溉策略大部分仍处于试验阶段则更加具有发展前景,在未来土壤水分传感器和植物信息传感器极有可能成为未来的研究热点。近些年来,物联网技术、云计算和大数据应用得到了快速的发展,模糊控制、专家系统以及神经网络等人工智能技术被应用到灌溉策略中,新技术与灌溉策略的结合将会大大提高灌溉的精确度。总的来看,改善温室灌溉控制策略已迫在眉睫,发展精准节水灌溉是改善温室灌溉的必然趋势。
在未来的发展中,温室节水灌溉控制技术的发展趋势必定向着更高效、更简便以及更智能化的方向发展。
