基于PLC的分布式船舶推进集控装置设计
2022-08-12唐文俊
唐文俊,刘 波
应用研究
基于PLC的分布式船舶推进集控装置设计
唐文俊1,刘 波2
(1. 海装广州局驻广州地区第二军事代表室,广州 511464;2. 海装广州局驻广州地区第一军事代表室,广州 511464)
当下基于电-气结合的船舶控制装置已经远远不能满足新型电力推进系统的需求。随着船舶自动控制技术的进步,新功能强大基于数字处理器的船舶推进集控系统应运而生。本文以某型基于西门子S7-1500 PN型PLC与ET200SP型分布式从站的船舶推进集控装置为例,从功能需求、结构、以及软硬件设计等多个角度对分布式船舶推进集控装置进行了详细的介绍。该型船舶推进集控装置的设计思路和技术特征对其他船舶自动化控制设备的设计具有一定的参考意义。
电力推进系统 自动化控制 推进集控装置 PLC分布式从站
0 引言
船舶推进集控装置是船舶电力推进系统用于实现船舶主机的自动化操控与状态实时监测的重要组成设备。船舶推进集控装置对保证船舶主机的安全经济可靠运行,减轻船员劳动工作量,提高船舶的操纵性能具有重要的作用[1]。现有基于电-气结合式的船舶推进集控装置正处于主机遥控系统发展的第三阶段[2],存在设备体积大,布置麻烦、功能单一、监控报警功能简陋、自动化程度低、难以扩展等缺点,远远不能满足新型船舶电力推进系统的需求。
随着船舶计算机控制技术不断发展,配置基于数字化控制器与工业总线网络的新型船舶推进集控系统成为船舶电力推进系统在智能化领域发展的新方向。新型船舶推进集控系统不仅结构紧凑、功能强大、人机界面友好,并且具有强大的扩展性。工业通讯总线的应用使船舶推进集控装置具备了分散布置,集中控制的特性,极大的增强了安装的灵活性与适应性[3]。
西门子SIMATIC S7-1500 PN型PLC控制器是西门子工业自动化集团推出的新一代数字化可编程逻辑控制器,具有可靠性高、抗干扰能力强、配套齐全、体积小、重量轻等特点[4],通过与ET200SP型分布式从站配合,可以实现数据采集输出与数据处理的分离。本文从功能、结构以及软硬件设计等多个角度,详细介绍了基于PLC的分布式船舶推进集控系统的设计。
1 船舶推进集控装置的总体设计
1.1 推进集控装置的功能需求分析
根据船舶电力推进系统的设计要求,推进集控装置应具有以下功能:1)操作方式选择功能;2)检测采样功能;3)电机速区控制功能;4)电机调速控制功能;5)故障报警功能;6)数据处理与存储记录功能;7)中断处理功能。功能需求的层次结构如图1所示。
1.2 推进集控装置的结构设计
推进集控装置采用分布式设计,由遥控车钟、推进集控台、分布式从站三部分组成。其中遥控车钟位于指挥台,推进集控台布置于集控室,分布式从站安装于机舱主机旁。用户可分别在指挥台、集控室通过推进集控装置对船舶主机进行控制。
遥控车钟具有整个集控装置最高的控制权限,包括主航车钟、经航车钟与显示车钟。用户通过主航或经航车钟向推进集控台发出车令,推进集控台根据车令自动完成主机转速的控制。为了确保车令下达的正确性,用户可以通过显示车钟接收来自推进集控台的回令。
推进集控台是整个推进集控装置的核心,包含PLC、集控车钟、监控计算机等设备。PLC利用CAN总线与PROFINET现场总线分别连接遥控车钟与分布式从站;通过Modbus和以太网向航行记录仪VDR、机电长显示仪、监测报警系统等外部设备发送数据[5]。推进集控台具有自动模式与手动模式两种控制模式。自动模式下用户通过集控车钟向PLC发出车令,PLC根据车令和来自分布式从站的主机状态数据,结合控制逻辑形成主机控制信号;手动模式下用户可以越过PLC,直接使用操纵键盘控制主机。PLC根据状态数据自动分析判断系统故障并输出故障报警信息。 PLC内部建立数据库记录航行数据与系统状态信息。用户可通过监控计算机显示器直观读取当前系统状态与故障报警。为确保装置的可靠性,推进集控台配备一套指示仪表和报警指示灯,与监控计算机互为冗余备份。
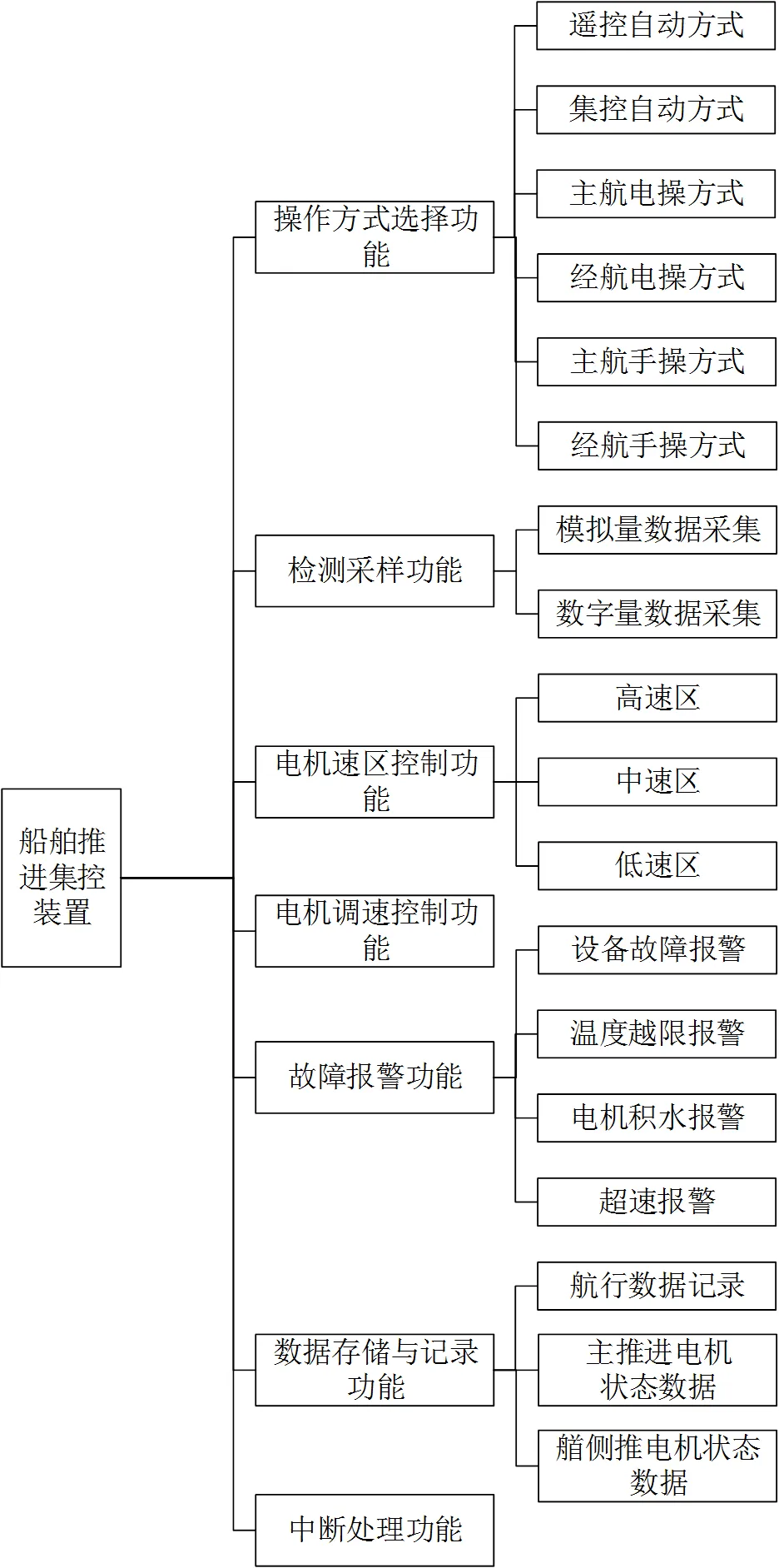
图1 推进集控装置的功能需求
分布式从站中ET200SP型从站模块一方面通过IO模块实时采集主机状态信号,另一方面通过执行继电箱与励磁调节器控制主机的运行。励磁调节器采用冗余配置,当主励磁调节器故障时自动切换至备用励磁调节器,确保故障情况下主机依然得到控制。
2 推进集控系统的硬件设计
推进集控台的PLC由西门子S7-1500-1 PN型CPU模块、接收操控键盘信号的32×24VDC的DI模块、输出状态和报警信号的32×24V DC的DO模块、支持Modbus RTU通讯协议的CM PtP RS422/485模块、CAN通讯的西门子PN/CAN LINK 模块和SCALANCE X208型PROFINET交换机构成。监控部分包括监控计算机、操控键盘、鼠标、指示仪表和报警指示灯、报警蜂鸣器等。
分布式从站的SIMATICET200SP型分布式远程从站模块通过背板总线连接采集电机状态数字量的32×24VDC的DI模块、输出励磁电流的8×U/I型AQ模块以及用于采集的电机温度、电流以及转速等模拟信号的8×U/I/RTD/TC型AI模块、控制执行继电器箱的16×230V的DO模块。AI模块的信号输入为4~20 mA电流与-10 V~10 V电压。因此AI模块的输入前端配置高精度采样电阻与滤波器以提高采样精度,消除采样信号中的扰动与毛刺。
为兼顾通讯速率与成本,推进集控装置内部除遥控车钟与推进集控台之间采用CAN通讯外,其他设备之间的通讯均基于以PROFINET网络交换机为核心的分布式网络系统。
3 推进集控系统的软件设计
3.1 控制软件逻辑与单元层次
推进集控装置控制软件设计主要采用结构化的方法。设计中考虑逻辑控制软件的特点,利用全局变量传递数据,以节约计算开销和和程序空间。软件运行以周期调用和事件触发两种调用方式相结合:初始化后进入周期循环,事件发生时中断触发控制调用周期。
控制软件按照如下原则进行软件单元的划分:1)软件内的软件单元以功能进行划分。功能较复杂的软件单元,再以功能的分支进行子单元的划分。2)以接口进行划分。针对逻辑控制软件外部数据采集的特征,对于与硬件有接口的软件单元的划分尽量与硬件的模块、接口划分相对应。3)以工作模式进行划分。根据如图2所示的运行状态(或模式),某个状态特有的软件功能在一个软件单元内实现,再根据功能划分软件单元。

图2 控制软件状态转换图
软件可以分为三个部分,分别为初始化程序,主循环程序和公用函数库。
初始化程序:对PLC输出控制量与内部寄存器进行初始化。
主循环程序:主循环程序根据运行状态与功能的不同,分为启动模块、停机模块、运行模块、故障报警模块、输入输出模块与通讯模块。
公用函数库:用于存储模块间交叉引用的功能函数。
软件详细结构层次如图3与图4所示。
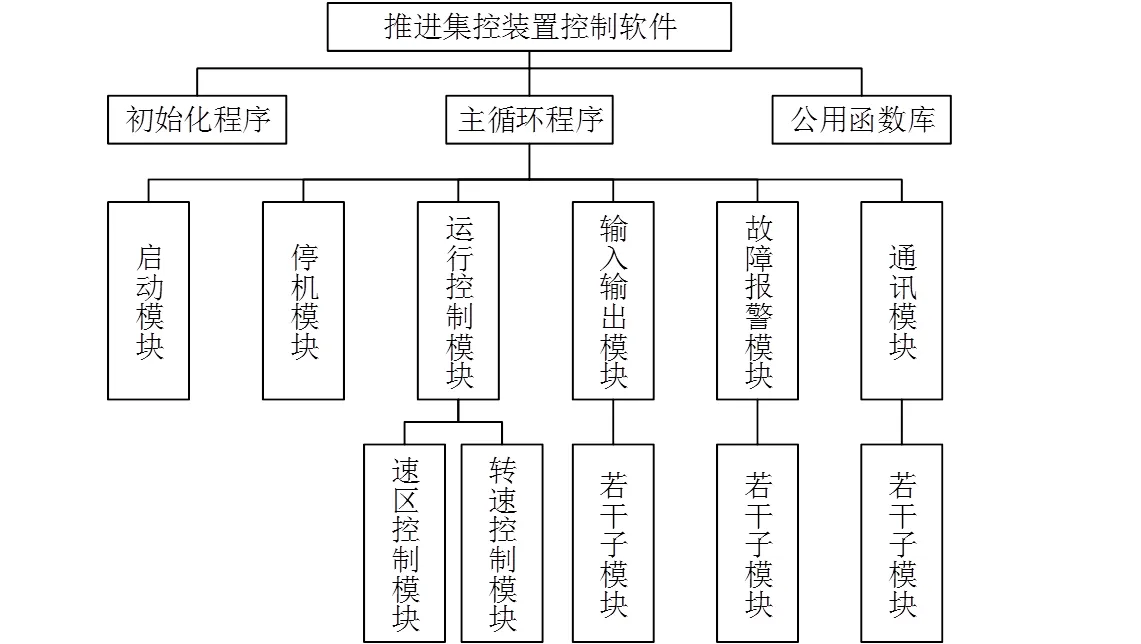
图3 控制软件单元结构

软件模块子模块 输入输出模块DI输入处理模块 AI输入处理模块 AO输出处理模块 DO输入处理模块 故障报警模块故障检测模块 故障存储模块 报警模块 故障复位模块 通讯模块485通讯模块 以太网通讯模块 PLC-CAN-车钟通讯模块 PLC-CAN-VDR通讯模块 速区控制模块停机-低速区模块 低速区-中速区模块 低速区-高速区模块 中速区-高速区模块 停机模块 低速区-反转模块 中速区-反转模块
3.2 人机界面的设计
监控计算机使用西门子WinCCRunTime组态软件开发人机界面。考虑到系统的安全性问题,用户进入操作系统后,系统将直接以全屏的方式进入监控初始界面。用户可经过左侧菜单选择进入不同的监控界面,退出系统经确认后将直接实现计算机的关机。
人机界面由6个子界面组成,分别是:主推进分系统参数显示界面、主推进分系统报警及故障显示界面、主推进分系统历史数据查询界面、艏侧推分系统参数显示界面、艏侧推分系统报警及故障显示界面、艏侧推分系统历史数据查询界面。6个子界面层叠放置于同一窗口中,用标签加以区分显示,转换至某界面只需点击相应的标签即可。人机界面的结构如图5所示。

图5 人机界面结构
3.3 通讯总线的设计
推进集控装置采用基于UDP协议的以太网与1#和2#推进主机能量管理系统通讯。数据轮询采用主从式,由PLC每1 s发送一次非实时数据轮询数据包,推进主机能量管理系统收到数据后在100 ms内必须回复。如果计算机在100 ms没有收到数据,错误加1,如果在60 s没有收到数据,认为通讯巡检信息处理机节点网络通讯故障。
推进集控装置与机电长显示仪的通讯采用基于Modbus RTU协议的RS-485串行总线。其中机电长显示仪为主站,推进集控装置为从站。需要读取数据时,机电长显示仪向推进集控装置发送功能码为0x03报文。推进集控装置在收到报文后,向机电长显示仪发送功能码为0x10的报文,并在指定地址寄存器内写入数据。为确保通讯的可靠性,通讯设备采用CRC校验方式对报文数据的正确性和完整性进行校验。
航行数据记录仪VDR与推进集控装置之间的通讯采用CAN2.0B协议,为防止外部电磁干扰,通讯接口加装光电隔离器。
4 结论
本文从功能需求、结构设计、以及软硬件等多角度详细介绍了基于PLC的分布式船舶推进集控系统的设计。本文所述推进集控装置经过实船应用验证,证明基于PLC的分布式船舶推进集控系统具有功能强大、安装灵活等特点,极大减轻船员的劳动强度,提高了船舶航行的安全性与稳定性。该型推进集控装置设计过程中应用的方法与思路为其他船舶电力推进系统自动化设备的开发可以提供有益参考。
[1] 刘芃澎, 刘志刚. 综合电力系统电力推进分系统集控台设计, 2021, 41(02): 60.
[2] 顾林林. 船舶主机遥控系统的设计与实现[D]. 大连:大连海事大学, 2014.
[3] 孙晗. 船舶主机遥控系统的研究与设计[D]. 大连:大连海事大学, 2016.
[4] 谢泓丘. 基于西门子S7_1500PLC沼气净化控制系统的实现[D]. 绵阳: 西南科技大学, 2019.
[5] 李成阳, 黎曙, 贾志强. 一种分布式船舶推进集控装置[P]. 中国: CN 201910000047.0[P]. 2019.
The design of distributed ship propulsion control equipment based on PLC
Tang Wenjun1, Liu Bo2
(1. The Second Military Representative Office of Guangzhou Bureau of Naval Armament Department of PLAN, Guangzhou 511464, China; 2. Guangzhou First Military Representative Office, Guangzhou Military Representative Department, Naval Armament Department of PLAN, Guangzhou 511464, China)
U664.14
A
1003-4862(2022)04-0034-04
2021-08-09
唐文俊(1986-),男,工程师。研究方向为电气工程。E-mail: 444625237@qq.com
