同步电机转子初始位置电动势检测法
2022-08-12李盛雄胡华成
汪 伟,李盛雄,胡华成,朱 磊
应用研究
同步电机转子初始位置电动势检测法
汪 伟,李盛雄,胡华成,朱 磊
(武汉船用电力推进装置研究所,武汉 430064)
本文分析了同步电机正转和反转时电动势与初始位置的规律,提出检测初始位置的相关因素,并总结了检测方法,最后举例说明该方法的正确性。
同步电机 初始位置 检测
0 引言
本文介绍了,通过采样同步电动机的反电动势(端电压),分析计算同步电动机转子初始位置。适用于安装增量式码盘的同步电动机,包括永磁同步电机、电励磁同步电机、直流无刷电机(方波电机)的初始位置检测。
首先分析了检测原理,形成检测方法,以及在软件中的设置方法。本方法已经在三相永磁同步电机上验证正确。
1 检测原理
1.1 电机正转的原理分析
图1给出了同步电机的正向旋转时的物理模型[1],图2是同步电机正转的电动势波形。其电枢绕组空载电动势近似为正弦波。电机运行在空载发电状态或空载电动状态,输出端电压即为电枢绕组空载电动势。以此为例,说明检测初始位置[2]的原理。
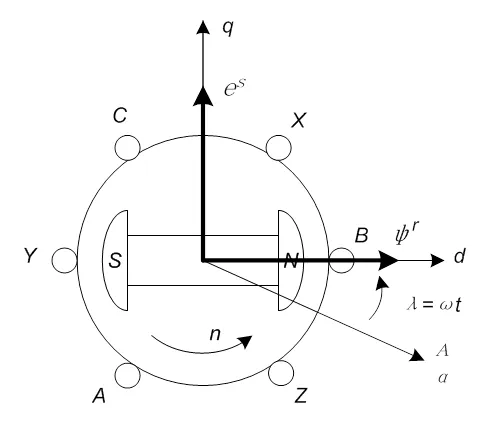
图1 同步电机正转的物理模型

图2 同步电机正转的电动势波形图
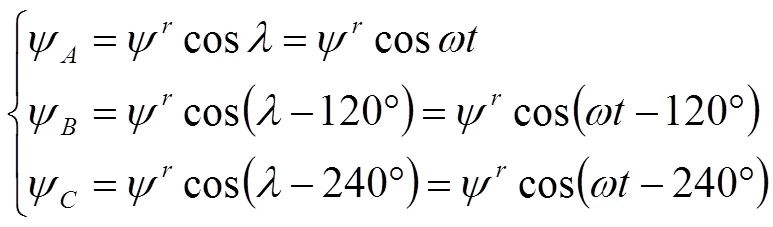
同步电机空载正转时,三相绕组对应的磁链为:
定子三相绕组的电动势为:

根据式(1)和式(2)说明:
电机正向旋转(以电机出力端部为视角,电机逆时针旋转为正向)时存在关系:
1)为正,总正向超前ψ角度为90°。在时域图上,体现为的超前ψ角度为90°,并且和以相同的角频率正向旋转。
2)三相磁链和电动势存在关系:A超前B、B超前C、C超前A。
以A相为例分析电动势的大小、过零点和转子初始位置的关系:
1)当=0,且在负向过零点时,ψ正向最大,即d轴与α轴(+A)重回;此时的转子位置角为0;
2)当≤0时,转子正向旋转,ψ从正向最大减小到负向最大,转子d轴与α轴的夹角在0~180°电角度之间;
3)当≥0时,转子继续正向旋转,ψ从负向最大变化到正向最大,转子d轴与α轴的夹角在180~360°电角度之间。
以A相电动势的过零点和ABC三相的相序,就能判断出正弦波同步电机转子位置的空间位置[3]。
以三相定子绕组电动势的过零点就能判断出方波电机转子的六个空间位置。
安装增量式码盘(码盘有AB正交脉冲和零位置Z三种)的同步电机,由于安装时的码盘固定不确定性和转子轴位置的随意性,在电机第一次启动前无法通过增量式码盘检测出电机的位置。
下面分析如何利用增量式码盘的Z脉冲,获取安装码盘引入的转子初始位置λ。
如图2所示,Z脉冲与负向过零点之间的夹角为λ= 126°(电角度)。因此,当Z脉冲出现时,转子位置=λ= 126°(电角度)。
2.2 电机反转的原理分析

图3 同步电机反转的物理模型

图4 同步电机反转的电动势波形图
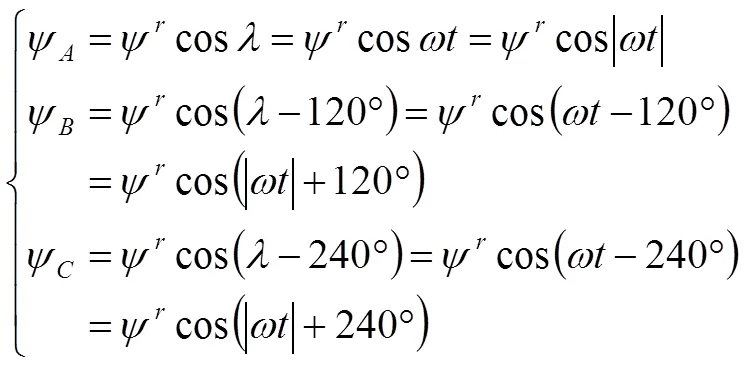
同步电机空载反转时,三相绕组对应的磁链为:
同步电机空载反转时,三相绕组反电动势:

因此,电机反向旋转时,存在关系:
1)为负,e总反向超前ψ角度为90°。在时域图上,体现为e的超前ψ角度为90°,并且e和ψ以相同的角频率正向旋转。
2)三相磁链和电动势存在关系:A超前C、C超前B、B超前A。
以A相为例分析电动势的大小、过零点和转子初始位置的关系:
1)当e=0,且e在负向过零点时,ψ正向最大,即d轴与α轴(+A)重回;此时的转子位置角为0;
2)当e≤0时,转子负向旋转,ψ从正向最大减小到负向最大,转子d轴与α轴的夹角在0~-180°电角度之间,即360~180°之间变化;
3)当e≥0时,转子继续负向旋转,ψ从负向最大变化到正向最大,转子d轴与α轴的夹角在-180~-360°电角度之间,即180~0°之间变化。
以A相电动势的过零点和ABC三相的相序,就能判断正弦波同步电机转子位置的空间位置。
以三相定子绕组电动势的过零点就能判断出方波电机转子的六个空间位置。
在电机反转时,获取安装码盘引入的转子初始位置[4~5]。如图4所示,Z脉冲与e负向过零点之间的夹角为λ= -126°(电角度)。因此,当Z脉冲出现时,转子位置=λ= -126°(电角度)。
2 初始位置的检测方法
2.1 检测的相关因素
在实际检测安装增量式码盘引入的转子初始位置角λ时,与如下几个因素有关:
1)电机输出端A、B、C三相的定义,即在连接电缆时,三相电缆与绕组一致性。存在相序一致性:相序相同(正序)/ 相序相反(负序)。用符号SABC表示相序。SABC=+1,正序。SABC = -1,负序;
2)码盘的安装位置:电机出力端(正对着电机轴线的出力端,即出力端的延长线上) / 电机非出力端。用符号Sm表示安装方位。Sm=+1,非出力端安装,此时,AB脉冲计数器T2CNT增计数。Sm=-1,出力端安装,此时,AB脉冲计数器T2CNT减计数。
3)电机极对数;
4)线数;
5)电机输出端电频率。即电动势基波周期T;
6)冲到A相电动势负向过零点时间ΔTAZ。某些场合无法检测到A相电动势,而以输出端线电压AB的代替。那么该相关因素为Z脉冲到线电压AB负向过零点时间ΔTABZ。
检测工具:至少有2通道的示波器及电压探头,最好为4通道示波器及电压探头。
另,本方法形成前期,多考虑了一个相关因素,即电机转向Sn。Sn=1表示电机正转;Sn=-1表示电机反转。但是在HTS上多次测试,表明,结果与电机转向无关。
3.2 检测步骤
常见的检测步骤如下:
1)A、B、C三相相序是否为正序。如果为负序,则重新定义输出端的A、B、C端子;
2)码盘安装方位;
3)正向稳定运行时,同时检测A相电动势和Z脉冲,获得电动势的基波周期和Z脉冲到A相电动势负向过零点时间(或者Z脉冲到线电压UAB负向过零点时间);
4)计算方法得到安装码盘引入的转子初始位置λ0,其中SABC=+1,Sm=+1。
在各种场合可以采用如下通用的检测步骤:
1)A、B、C三相相序;
2)正向稳定运行时,同时检测A相电动势和Z脉冲,获得电动势的基波周期和Z脉冲到A相电动势负向过零点时间(或者Z脉冲到线电压UAB负向过零点时间);
3)计算得到安装码盘引入的转子初始位置λ。
3 实例
某三相永磁同步电机发电时,输出电压正序,码盘位置安装为非出线端,码盘为Meyle的2048线增量式光电码盘,2对极,Z脉冲到A相负向过零点时间为96 ms,稳定运行基波周期为1 100 ms。
4 总结
本文分析了同步电机正转和反转时,电动势与初始位置的规律,提出检测初始位置的相关因素,并总结了初始位置的检测方法,然后以某三相永磁同步电机为例,说明该方法的正确性。
[1] 李志民, 张遇杰编著. 同步电动机调速系统[M]. 北京: 机械工业出版社, 2001,1.
[2] 李抑非, 蒋全. 永磁同步电机转子初始位置检测技术研究进展[J]. 电子科技, 2021, 34(04): 24-33.
[3] 李新旻, 陈伟, 张国政等. 基于高频信号耦合注入的内置式永磁同步电机转子初始位置检测方法[J].电机与控制应用, 2021, 48(05): 7-13.
[4] 韩松杉; 周明磊; 游小杰等.内埋式永磁同步电机初始位置检测方法的比较与改进[J]. 铁道学报, 2020, 42(11): 68-74.
[5] 李瑞棋; 黎英.永磁同步电机转子初始位置检测方法[J]. 电子测量与仪器学报, 2020, 34(04): 194-200.
A electromotive force detection method for initial position of synchronous motor based on
Wang Wei, Li Shengxiong, Hu Huacheng, Zhu Lei
(Wuhan Institute of Marine Electric Propulsion, Wuhan 430064, China)
TM341
A
1003-4862(2022)07-0016-03
2021-11-10
本论文受“湖北省青年拔尖人才培养计划”资助
汪伟(1980-),男,高级工程师,研究方向:电力电子,系统控制。E-mail:1504268594@qq.com
