水下检测技术在岩塞爆破工程中的应用研究
2022-08-10崔翼飞汪小江
任 远,崔翼飞,汪小江
(1.中国电建集团西北勘测设计研究院有限公司,西安 710065;2.华能澜沧江水电股份有限公司里底水电厂,云南 维西 674606)
0 前 言
中国在20世纪70年代初期,为修建引调水工程开挖进水洞,在水库或湖(海)底部的临水侧,预留一定厚度的岩体,即为岩塞。岩塞具有挡水的作用,能保证背水侧的隧洞采用干地法施工,待背水侧的隧洞完建或挡水永久闸门竣工且不影响后面隧洞施工,一次性水下爆除岩塞形成进水洞。岩塞爆破是爆破施工的一种特殊形式。岩塞爆破有洞室爆破、钻孔爆破和组合爆破等3种常见的方法。其中洞室爆破法又分为集中药室洞室爆破法和条形药室洞室爆破法;而钻孔爆破法又包括深孔和炮孔爆破法2种(孔径D>75 mm且孔深h>4 m的称为深孔,小于以上数值的称为炮孔);组合爆破就是基于上述方法相互结合爆破施工。组合爆破有的前部分用洞室爆破,后部分用钻孔爆破,有的以洞室爆破为主,钻孔爆破为辅。
目前,我国的岩塞爆破技术虽然在勘察设计、爆破计算、爆破试验、火工材料和施工等方面都取得了较大进步,但依然存在进水洞成型偏差和稳定性等问题。本文针对某水库排沙洞工程岩塞爆破后进水洞水下检查,研究水下检测技术原理,并探索和实践深水层有限空间内水下检查的有效方法,解决遇到的实际困难,为岩塞爆破工程后评价及进水洞正常运营维护提供水下信息。
1 工程概述
某水库排沙洞工程“一洞两用”,汛期泄洪排沙,非汛期引流发电。排沙洞工程由进水洞、排沙洞和发电支洞3部分构成。进水洞位于水库主河道左岸,岩塞位于水面以下约70 m,开口正对右岸支流的汇入口。岩塞的设计厚度为12.3 m,岩塞顶部为椭圆形,设计尺寸27.84×20.3 m(长轴×短轴);岩塞底部为圆形,设计内径10 m,设计进洞中轴线与水平面夹角45°。
进水洞由岩塞体、锁口、高边墙、集碴坑、反坡段,平缓坡段和事故检修闸门等水工建筑物组成。岩塞底部紧挨圆形锁口,锁口内径10 m,为钢筋混凝土衬砌结构。锁口紧连集碴坑,集碴坑顶部为反坡洞身,集碴坑前端是高边墙,反坡段接平缓坡段,平缓坡段至事故检修闸门结束。岩塞入口距事故检修闸门121.29 m,集碴坑的长度56.4 m,底板高程1 637.00 m。进水洞的纵向布置见图1。
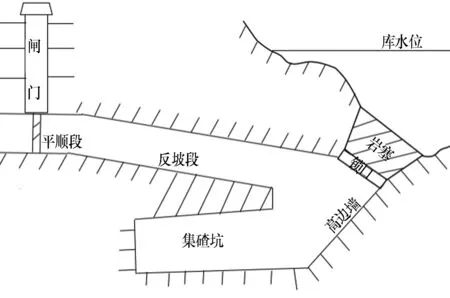
图1 某排沙洞工程进水洞的水工建筑物纵向布置
该进水洞岩塞爆破施工采用组合法,岩塞顶部采用钻孔爆破预裂,底部采用洞室爆破。钻孔采用高精度三维钻孔迹线定位,药室采用陀螺式分布,爆破施工次序为覆盖层扰动、岩塞预裂成型、爆除岩塞、覆盖层再次扰动和冲水下泄[1]。岩塞爆通后排沙洞和发电洞已正常运营6 a,已取得了显著的社会和工程效益,但鉴于深水层有限空间水下检查的困难,对岩爆工程及进水洞竣工后评价一直久拖未决。排沙洞和发电支洞可以关闭事故检修闸门,排空检查;而进水洞未修建事故检修闸门,无法排空检查。修建围堰或抽干水库检查,造价极高,不可行;潜水员下潜洞内检查,安全性差。
经过多年的海洋自然资源开发利用,推进了水下检测技术迅速提升[2]。多波束测深系统扫描和水下机器人探查等检测技术日臻完善,为解决岩塞爆破后进水洞水下检测提供了思路。
2 存在的主要问题
岩爆后水下检测进水洞存在问题如下:
(1) 高速高压过流。岩爆后洞内水流一直是高速高压过流,无法作业。
(2) 能见度低。深水层洞内光线本身弱,含泥沙的浑流能见度更低。
(3) 风险较高。水深约70 m,超过潜水员安全下潜60 m的允许值。
(4) 定位困难。封闭洞室空间无法卫星定位或常规仪器定位,钢筋混凝土衬的洞壁形成特有的地场,干扰指南针或陀螺仪定向。定位仅能岸上依靠监控图像、图纸或缆绳,粗略判断。
(5) 潜行困难。封闭洞室空间有限,水下洞室工况复杂,洞壁障碍物、水中杂物和洞底淤积物等不明物体,易阻碍潜水员或潜航器潜行。
3 水下检测技术原理
潜水员水下检查是潜水员携带量具或摄影机靠近待检目标直接勘察作业,并配合陆上工程技术人员通过摄像监控系统实现安全监控[3]。其原理是水下抵近直接目视检查。
多波束测深系统是现代信号处理技术、高分辨显示技术、高精度导航定位和3D成像等多传感器的集成,有波束换能器阵、RTK卫星定位、姿态传感器和数据采集处理等4部分组成,多波束测深系统扫描又被称为“水下CT”技术[4]。
多波束工作原理见图2。换能器阵列向目标区域发射一个垂直于航迹的扇形波束,接收换能器阵列接收目标区域回波信号,沿着与航迹垂直的方向形成几十个或几百个窄波束,获得距离和相位差等关键参数,经过数字信号处理,获取水下结构的空间坐标和图像信息,并实时3D成像。
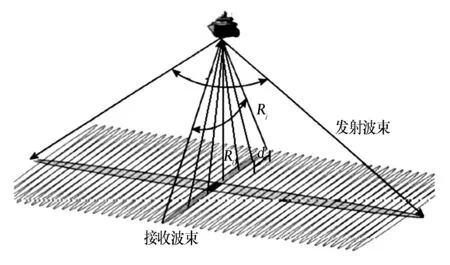
图2 多波束工作原理
水下机器人检查是操作手在地面遥控潜水器完成水下探查任务。其原理是遥控潜行器间接水下检查。水下机器人分为有缆遥控潜水器(ROV)、无缆潜水器(AUV)和复合型潜水器(ARV)。ROV技术应用成熟,应用较广;AUV受限于水下长期供电、定位、通讯和载荷等技术尚未发展成熟,应用范围较窄[5]。
4 检测方法比较
潜水员水下检查优点是检测成果直接可靠,可清淤后进行局部精细检查;缺点是在水体能见度低或深水急流时无法作业。即便是控制水流,水体能见度高,但深水层洞室潜水员作业,作业范围受限,检测效率低。何况洞室水深已达70 m,超过潜水员60 m的安全作业深度,采用潜水员水下检查的方法不适合。
ROV水下检查优势是可根据预定航线进行巡检,能达到人工不方便到达的深度和肉眼难以企及的精度进行检查,并以先进的图像识别和图像回传技术实现水下稳定地检查分析[6],ROV拍摄影像分辨率较高,无人身风险;缺点是在急流或旋涡水体下无法作业,潜行易发生缆线缠绕,存在丢失设备的风险。AUV水下检查尚在未发展成熟阶段,无缆水下定位和水通讯技术尚未突破瓶颈,进水洞内AUV水下检查更不可行。
多波束水下检查的优点是扫测覆盖面积大,作业高效,可实时三维成像检查,适宜于卫星信号覆盖良好、大面积的水域测量。多波束采集高密度水下地形点云,构建的点云图形细腻、纹理表现丰富,能精细地反映水下的地形地貌[7];缺点是受限于卫星信号,仅能在卫星信号覆盖良好的区域作业。水下检测常用的3种方法分析结果见表1。
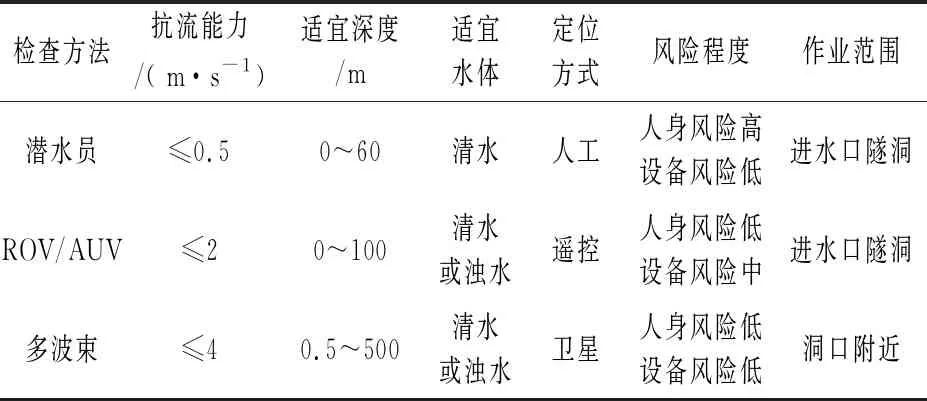
表1 岩爆后进水洞水下检测拟采用的3种方法比较
综合上述分析,潜水员下潜进水洞水下检查显然不适宜,多波束测深系统扫描联合ROV水下检查进水洞较为适宜。
5 水下联合检测技术的工程应用
5.1 总体方案
进水洞的水下检查拟采用多波束测深系统扫描联合ROV水下检查的技术方案。多波束测深系统扫测岩塞开口及进洞口附近河床,ROV水下探查整个进水洞。在洞内经补光能见度清晰时,ROV直接录制视频或拍照检查;洞内经补光能见度仍较弱时,ROV搭载近距离声呐扫测洞壁。集碴坑淤积测量,设计使用ROV搭载深度计测量。
5.2 设备选型
5.2.1多波束测深系统选型
多波束测深系统的精度取决于其定位、声呐、姿态校正和声速校正等4个子系统的测量精度,系统选型参考的相关技术参数如下:
RTK定位设备,水平位置精度应满足±10 mm,高程精度应满足±20 mm;测深分辨率,应满足±3 cm,最大测深量程应达到150 m;姿态传感器的航向和横滚俯仰动态测量精度应满足0.1°,分辨率应满足0.01°,升沉横摆总摆渡测量精度应满足±5 cm;声速测量精度应满足±0.006 m/s,其分辨率应满足0.001 m/s。
5.2.2ROV水下机器人选型
ROV选型应考虑便携性、密封性、搭载能力、抗流能力、负载能力、灯光亮度、通讯方式、供电方式和辅助设备等[8]。其选型参考的主要技术参数如下耐压深度应满足100 m,电缆长应大于150 m,抗流应满足2 m/s,摄像头分辨率应至少达到1080P(200万像素);图像声呐仪的最大量程应达到20 m,距离分辨率应满足±3 cm;360°避碰声呐仪测程应满足15 cm~200 m,5 m范围内距离分辨率满足±2 mm,5 m以上应满足±10 mm;惯导定位精度应满足测程的2‰;测深计测深精度应满足±10 cm。
5.3 关键技术设计
5.3.1多波束工作平台搭建
船的稳定性影响测深精度,大而重的铁船稳定性强,但对内陆河道而言,大船不仅在转弯调头时灵活性差,而且在浅水域无法航行。橡皮艇灵活性强,适宜于浅水或深水域航行,但稳定性稍弱。水库河床需多波束测深系统多航线扫测,橡皮艇作业较方便。为增加橡皮艇的稳定性,又方便多波束数据采集,设计加工了用于橡皮艇上的多波束测深系统工作平台(见图3和图4)。

图3 搭建的多波束测深系统工作平台
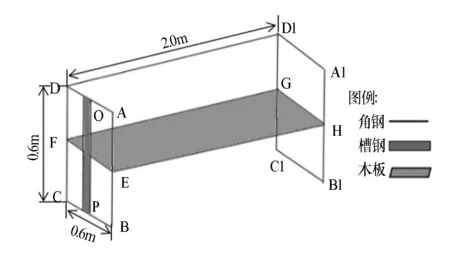
图4 多波束测深系统工作平台结构
工作平台使用角钢、槽钢和木板等材料加工而成。其主体分为左舷框、右舷框、横杆和木板4部分。左舷框位于橡皮艇左侧,图4中立面ABCD为左舷框的安装位置,OP为槽钢位置;右舷框位于橡皮艇右侧,图4中立面A1、B1、C1、D1为右舷框的安装位置;横杆连接橡皮艇两侧左右舷框,图4中DD1、FG和EH为横杆安装的位置;木板位于主体框架的中部,图4中平面EFGH为木板的安装位置。
设计加工的该工作平台方便拆卸或安装,自重约35 kg。工作平台能实现多波束换能器垂直安装,保持RTK相位中心和换能器声波发射中心在同一条铅锤线上。搭建工作平台时,换能器安装在噪声低且气泡少的橡皮艇中部位置,光纤罗经安置在能灵敏反映船和换能器姿态的工作平台的中部位置。
5.3.2航线设计
航线设计目的是控制多波束测点的分布和密度。测点密度与航线间距、波束开角和水深等相关。航线间距小,重复扫测面积大,测点密。波束开角越小,测点越密,但扫测宽度窄。航线布设应平行水流方向,主航线间距应不大于0.8倍的扫测带宽,重要航线间距应不大于0.5倍扫测带宽,检查航线应垂直于主航线布置[9],对重要部位应加密布置航线。主河道平均深度约40 m,河面宽约150 m,设计航间距20 m;支流平均深度约23 m,河面宽约130 m,设计航间距15 m。加密航线精扫岩塞开口,设计航线间距2 m。
5.3.3扫穿岩塞底部的设计
精扫岩塞开口,受洞口的限制,测量船位置或波束开角不佳,波束不可能扫穿岩塞底部。解决这一问题方法有3种:第一种方法是倾斜45°安装多波束换能器,尽量保持换能器中心发射声波线刚好与进洞中线重合,大量波束穿越扫测岩塞底部;第二种方法是选用有侧扫功能的多波束测深系统,倾斜发射波束,设置波束偏角(0°~60°可调),侧扫岩塞底部;第三种方法是测量船航行于最佳位置,调整相应的波束开角,扫穿岩塞底部。第一种方法需要加工多波束探头倾斜支架,并需要对倾斜安装的多波束测深系统进行校准改正[10],实施起来较为不便,建议使用第二种方法或第三种方法。图5是扫穿岩塞底部测量船的位置分析剖面图,图中A、B、C、D为设计岩塞纵剖面的4个顶点,AB为设计岩塞底部圆直径,CD为设计岩塞顶部椭圆的长轴。E、F、G、H、I和J等六点为水面线上多波束声呐探头的位置,A、D和E三点共线,B、C和J三点共线。其中EA∥FB,GA∥HB,IA∥JB,GA和HB,AG和BH都⊥CD。

图5 扫穿岩塞底部测量船的位置分析剖面
图5中共用AB边形成的ABFE、ABHG和ABJI 3个梯形所在水域是精扫岩塞开口测量船应在的最佳位置区。在这3个梯形水域内,只要存在平行于相应梯形上底或下底的发射声波,波束就能扫穿岩塞底部。依据工作水位、水深和岩塞的设计参数,计算出EA、HB和JB 3条发射声波所对应的多波束开角分别为8.2°、90°、161.8°,又多波束的波束开角一般在0°~160°内可调,因此,测量船行至最佳位置水域,分别可设置8.2°、90°和160°的波束开角扫测岩塞开口。基于上述分析,扫穿岩塞底部设计如下:
(1) RTK放样洞口位置,航线间距2 m,航向垂直于水流方向扫测。
(2) RTK导航,测量船在最佳位置水域,分别设置8.2°、90°和160°波束开角,精扫岩塞开口。或固定波束开角8.2°,调整波束偏角至45°,倾斜侧扫。
5.3.4ROV洞内检测设计
ROV洞内检查工况复杂,应全面考虑各种不利因素,设计如下:
(1) 在枯水期发电支洞机组停机且静水的状态下,实施ROV洞内检查。
(2) ROV抽检作业,沿断面线录制视频。先沿进水洞底板中轴线和两侧边墙与底板的交接线录视频,再每间隔10 m录制进水洞横断面视频。
(3) 对岩塞段、集碴坑和反坡前端等受岩爆影响大的部位详细检查。
(4) 洞内定位,根据ROV缆线进深和水下建筑物影像特征,并结合施工图纸判断粗略定位或ROV搭载抗干扰能力强的光纤罗经定位。
(5) ROV搭载强光灯水下补光,并备用1台可搭载的近距离声呐。
(6) 为防ROV挂机风险,设计备用2台有机械手的救援ROV。
5.4 应 用
按照上述设计方案,分两阶段实施岩爆后进水洞的水下检查。
2020年5月,第一阶段先施测了水下检测专用GPS控制网,后使用R2SONIC2024多波束测深系统(见图6),扫测了洞口附近河床,并精扫了岩塞开口。多波束扫测使用QINSy软件,数据处理使用Caris10.1后处理软件。声速仪测量了代表水域的声速,并观测了工作水位。对多波束采集数据,进行了降噪、剔错和改正等后处理。培训ROV操作,探查了洞口附近河床的淤积情况。
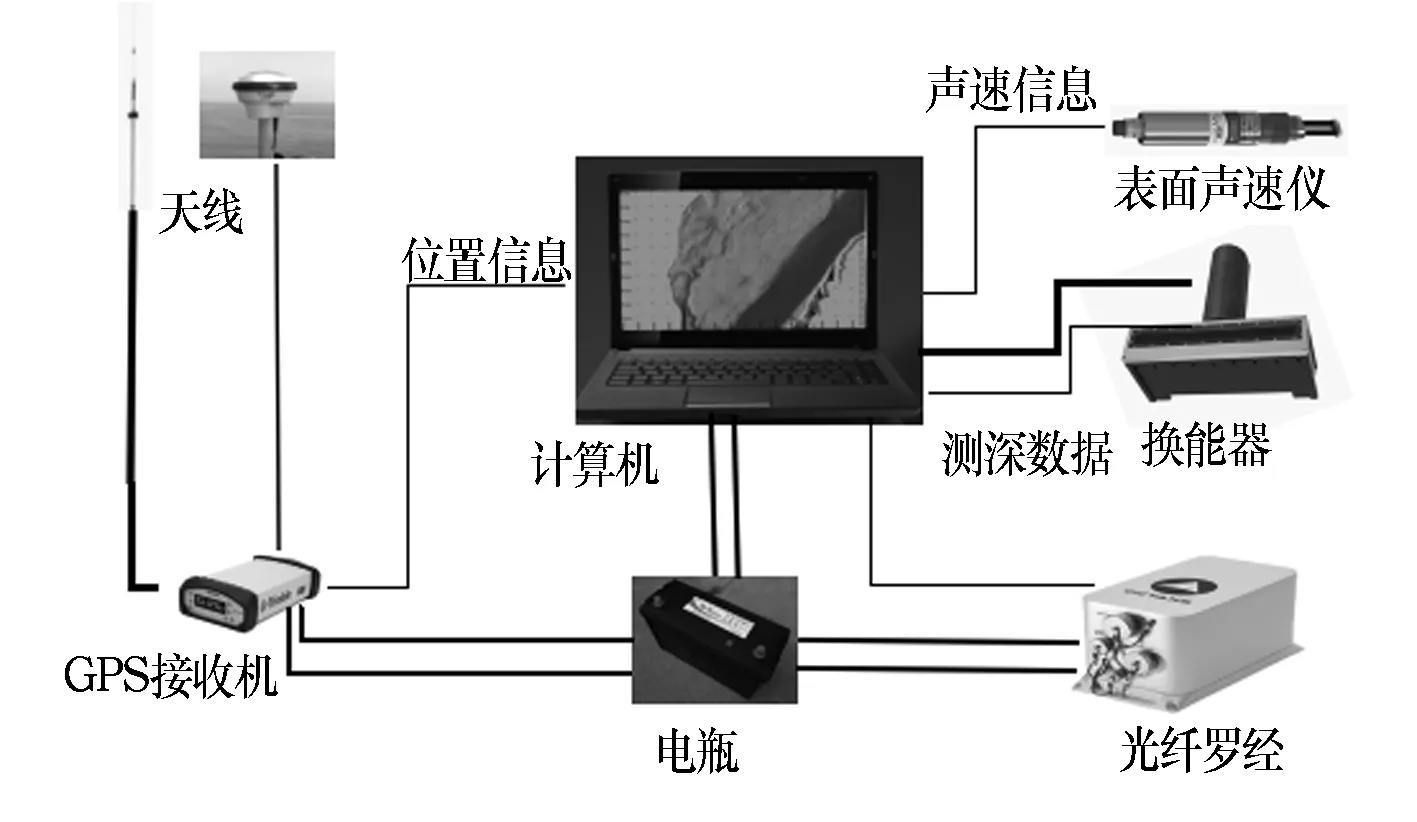
图6 R2SONIC2024多波测深系统组成
2020年12月,第二阶段使用潜鲛P200轻型ROV(见图7)在发电机组停机且静水的状态下检查了进水洞。ROV沿断面线录制了洞内视频,并详细检查了岩塞开口、集碴坑和反坡前端。
6 检测成果分析
从水下检测成果精度、洞口河床稳定性、岩塞开口、集碴坑淤积、衬砌段混凝土表观质量和工作效率等方面,分析设计的水下联合检测技术的应用效果。
6.1 精度分析
6.1.1GPS控制网精度
GPS控制网的最弱基线边的相对中误差为1/205070,最弱点平面位置中误差为±0.9 mm,GPS拟合高程精度为10.2 mm。GPS控制网平面位置精度满足四等GPS平面控制网的精度要求,实地检查GPS拟合高程,满足五等高程。
6.1.2多波束测点精度
使用R2SONIC2024多波束测深系统的定位设备在3个已知控制点进行了1 h静态校测,最大平面位置较差8 mm,最大高程较差17 mm。对比统计分析单波束和多波束重合点的测深精度见表2。
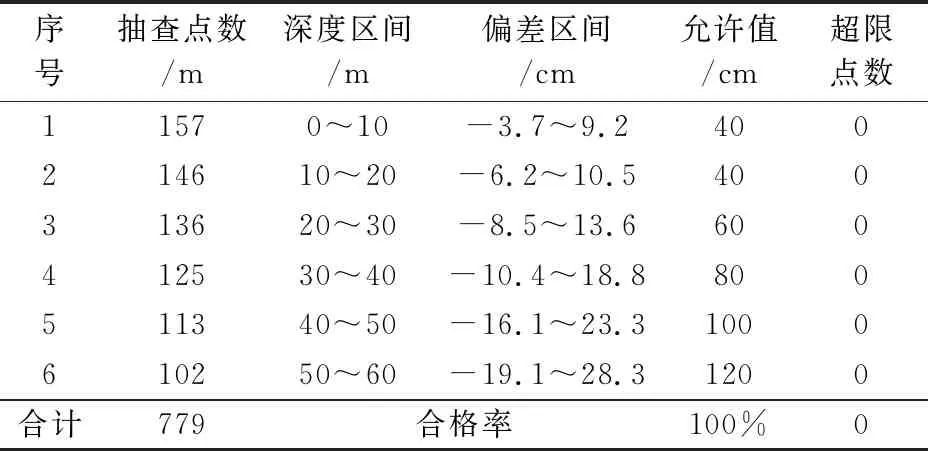
表2 单波束和多波束重合点测深精度分析表
表2可看出深度越大测深偏差区间也越大,但在60 m深度以内单波束与多波束较差均小于0.3 m。按 JTS 131—2012《水运工程测量规范》规定测深偏差的允许值为 2 倍测深误差[11],抽检重合点的测深偏差均小于允许值,说明多波束测点精度可靠。
6.1.3多波束影像的分辨率
多波束测深的分辨率不是检测目标的多波束影像辨率,多波束的影像分辨率与船速、发射频率、水深、波束开角和测点密度等相关[12]。多波束扫测前,在浅水区比较验证了多波束3D影像的分辨率。图8、9是试验扫测的台阶和岩缝的3D影像,图中可明显看出台阶轮廓线和岩缝线。实际量测台阶和岩缝的宽度与3D影像量测的较差均在10 mm以内,可见在浅水区多波束3D影像的分辨率能达毫米级。精扫的岩塞开口多波束影像(见图10),锁口圆形轮廓线隐约可见,依据经验推测60 m深的多波束3D影像分辨率能达厘米级。

图9 水下约6 m处岩石缝影像

图10 洞口附近河床多波束3D影像
6.1.4ROV影像的分辨率及深度计测量的精度
潜鲛P200轻型ROV搭载数码相机的像素为300万,采取补光的措施ROV拍摄的洞壁影像施工缝隙清晰,深70 m ROV影像的分辨率能到达3 mm。对比绳探和ROV深度计测量事故检修闸门底板深度的偏差为8.8 cm,小于10 cm允许值,可见深度计测深的精度可靠。
6.2 洞口河床的稳定性
图10是洞口附近河床的多波束3D影像,深蓝位置为进洞口,洞脸为70°岩质陡坡,陡坡顶有一弃渣台,输沙槽特征地貌明显。这种地貌特征的河床,易失稳。汛期泄洪排沙,非汛期发电洞引流发电,水位和水流经常变动。运营发电期水位和流速相对稳定,来流加裹沙石等淤积物能力低,一部分淤积物在洞口附近河床淤积,一部分被带向洞内。汛期开启泄洪闸门,来流加裹大量泥沙等淤积物冲入输沙槽,同时洞口河床的部分沉积物被再次激起一起带向洞内。如此反复,洞口附近河床始终处于一种动态的相对平衡。另外,洞顶弃渣台本身稳定性差,在洞口来流的激荡冲刷下,部分失稳的渣块会时常滑落洞口。
6.3 岩塞开口情况
图11是岩塞开口的多波束3D影像,洞口整体呈“喇叭”形,红色虚框内可见深蓝色的圆是锁口轮廓线,3D影像图洞穴的最低点在高程1 661.56 m,小于设计岩塞底部中心点高程1 664.48 m,证实多波束已扫穿岩塞底部。3D影像图量测锁口内径约8.8 m,小于10 m的设计内径。量测岩塞顶部近似椭圆形的开口尺寸为24.5×21.7 m(长轴×短轴),略小于27.84×20.3 m(长轴×短轴)的设计尺寸。

图11 岩塞开口多波束3D影像
观察岩塞开口的多波束影像,岩壁纹理褶皱不平,岩棱凸出且缝隙分明,锁口交接部有凸起岩块。观察ROV录制岩塞开口的视频及水下照片,与多波束3D影像观察的特征基本一致。
6.4 集碴坑淤积情况
深度计测量集碴坑淤积的平均高程1 651.90 m,小于集碴坑顶部1 653.70 m的设计高程,集碴坑尚未淤积满。集碴坑平均淤积厚度约14.9 m,落水点最低高程为1 648.80 m。图12是进水洞底板中线纵断面,红色曲线是测量的进水洞底板中线纵断面,蓝色曲线是设计进水洞底板中线纵断面。在混凝土衬砌段测量的纵断面线与设计断面线基本重合,在岩塞开口因岩爆的不确定性两条断面线不重合。
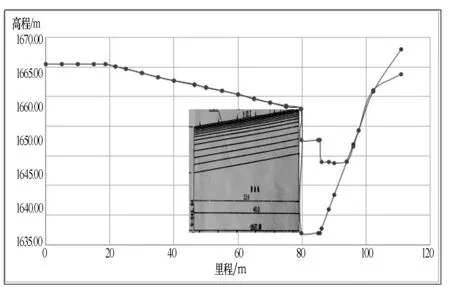
图12 进水洞底板中线纵断面
6.5 衬砌段混凝土表观质量
观察在混凝土衬砌段ROV录制的视频,在集碴坑高边墙、反坡的前端及两侧边墙混凝土表面破损明显,多为裸露钢筋及露骨料现象。距岩爆位置越近的衬砌混凝土表面破损程度越高,越远破坏程度越低。洞顶的混凝土表面质量,明显好于底板和两侧墙。岩爆虽对衬砌混凝土表面有局部破坏,但不影响钢筋混凝土衬混凝土层对洞壁的整体保护功能。图13、14是ROV拍摄有质量缺陷的照片。

图13 集碴坑高边墙混凝土露骨料
图14 反坡段边墙裸露钢筋
6.6 工作效率
多波束测深系统扫测洞口河床及岩塞开口,用时1 d,完成测点约78万。单波束测量洞口河床及岩塞开口,用时1 d,完成测点约0.2万。对比可见多波束测深系统采集数据高效。
ROV洞内水下检查,ROV定向设备失灵,依靠缆绳和监控影像判断粗略定位。洞内水下能见度约为2 m范围,ROV稍远离洞壁,四周一片水景,ROV下一步去向较难把握,需遥控反复探摸。沿纵断面录制视频,虽然借助缆线辅助定位录制顺利,但沿横断面录制视频,易发生跑偏和挂机。本计划ROV洞内检查1 d,实际3 d才勉强完成。虽受洞内定位困难影响,但ROV水下检查与潜水员检查相比效率较高。
7 结 论
本文针对深水层进水洞水下检查存在的困难,通过分析水下检测技术原理,比较常用水下检测方法的优劣,提出了多波束测深系统扫描联合ROV水下检查的思路,设计了水下联合检测技术方案,形成结论如下:
(1) 多波束测深系统扫描联合ROV水下检查岩爆后进水洞的方法确实可行,能克服水下检测遇到的困难,取得成果的精度和质量可靠。
(2) 多波束测深系统优点是采集数据高效,能实时3D成像,适宜于水下大面积扫测;受卫星定位信号遮挡影响,多波束扫测进水洞,仅能局限于洞口。
(3) ROV水下检测优势是搭载多功能传感器替代潜水员目视检查,安全风险小;缺点是视野小、抗流弱、缆线易发生缠绕,洞内准确定位困难。