分布式场景仿真中的空间坐标转换研究
2022-08-10熊天意甘德国齐佩汉
熊天意,甘德国,齐佩汉
(1.西南电子设备研究所,四川 成都 610036;2.西安电子科技大学ISN重点实验室,陕西 西安 710065)
0 引言
在传统的装备训练鉴定中,为验证装备在实际战场环境中的实战能力,一般通过试飞、试航等演习训练进行评估,需消耗大量的人力和物力,且试验周期长,不具备试验可重复性,再加上实际环境不断变化,无法对所有环境都进行充分测试[1-2]。分布式场景仿真技术为上述难题提供了一种有效的解决办法[3-5],场景仿真技术在实验室环境模拟产生真实场景图像序列,同时通过调用分布式试验资源,实现装备与异地实验资源的交互[6-8],支撑装备在真实的飞行试验之前进行充分的定量和定性分析测试,大幅降低装备能力评估鉴定的成本[9]。
分布式场景仿真通过软件方式,在设定的虚拟仿真空间中进行试验场景规划,包括地理区域规划、资源部署、平台运动路径规划等[10-11]。通过场景动态仿真推演,驱动试验资源产生与仿真场景对应的电磁信号并激励电子装备,使电子装备在内场试验室内可以感受到与真实外场相同的复杂动态电磁环境[12-14]。同时,基于分布式仿真技术,可将异地试验资源接入试验系统,实现本地装备与异地试验资源的交互。将该试验思想应用于电子装备试验鉴定,通过场景仿真平台完成试验场景规划,通过分布式仿真技术接入外场雷达装备,实现电子装备在试验室环境对异地雷达装备的侦察感知。为使虚拟仿真空间中试验平台与物理试验空间的试验资源节点在运动与信号传播方向等空间坐标参数保持一致,需将虚拟仿真域资源与物理试验域资源所处的坐标空间进行相互转换,支撑装备性能的定性与定量分析以及装备能力评估。
本文基于分布式场景仿真技术,探索雷达装备及其探测目标的运动和电磁信号传播方向在虚拟场景仿真空间与物理试验空间中的转换方法,将虚拟仿真空间中雷达对象的探测结果以及信号传播方向转换为物理试验空间中的真实位置与方位,实现仿真系统中虚拟对象与实装对象的相互转换,支撑电子装备在实验室环境实现动态能力验证与效能评估。
1 变量符号说明
变量符号对照表如表1 所示:
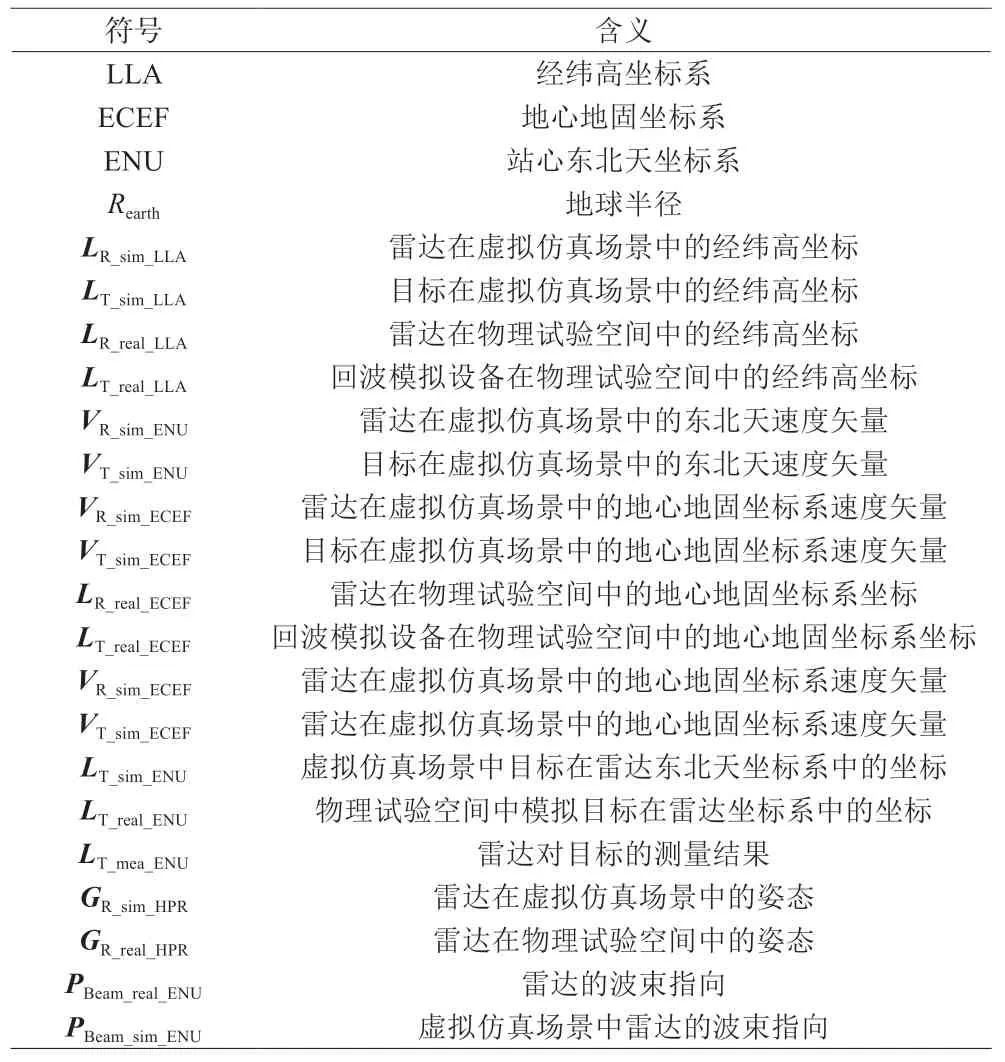
表1 变量符号对照表
2 坐标空间转换算法
基于分布式场景仿真,要求分布式部署的试验资源能够在统一的仿真场景中运行并且场景中同一仿真对象在不同仿真域中的行为需保持同步一致,这也是分布式仿真技术中的关键和难点所在。本文从场景仿真中雷达装备入手,针对以下几种典型情况的坐标转换需求,研究分布式场景仿真中试验平台在物理试验空间与虚拟仿真空间中的相互转换算法。
2.1 雷达目标回波坐标转换
场景仿真平台中,规划电子装备飞机平台飞行抵近雷达。在真实场景中,飞机平台抵近目标雷达时将会被雷达探测并跟踪。传统的试验训练中使用真实飞机平台进行实飞以产生雷达回波,该方式成本高昂,不支撑常态化试验。因此,为使雷达装备能够探测到飞机平台,使用回波模拟设备产生以飞机平台为目标的雷达回波信号[15-16]。如图1所示,场景仿真平台通过仿真推演计算飞机平台在仿真场景中相对雷达平台的斜距、速度、RCS 等参数并发送至回波模拟设备,回波模拟设备根据参数计算回波信号的时延、多普勒频偏以及功率,最后将所得参数调制到接收的雷达信号,并通过空间辐射至雷达装备。此时,雷达探测的目标与虚拟仿真场景中飞机平台的空间位置关系保持一致,从而完成雷达探测目标从虚拟仿真场景向物理试验场景的转换。
下面通过理论推导飞机平台作为雷达探测目标从虚拟仿真空间向物理试验空间转换的过程。由图1 可知,要模拟雷达的目标回波,需要获得虚拟仿真场景中的以下信息:
(1)目标与雷达的斜距:DRT_sim;
(2)目标与雷达之间的径向速度:VRT_sim;
(3)目标的RCS 值:RCST。
其中,下标R 表示雷达,T 表示雷达目标。一般情况下,场景仿真平台按仿真节拍周期输出仿真场景中各平台的位置(经度、纬度、高度)与速度(东向速度、北向速度、天向速度)。分别用以下符号表示雷达与目标的上述参数:
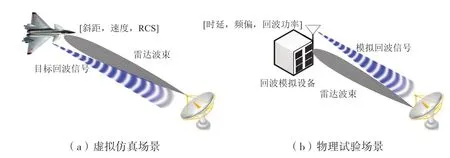
图1 雷达目标转换关系
(1)雷达平台位置:
LR_sim_LLA=[LR_sim_lon,LR_sim_lat,LR_sim_alt]T;
(2)雷达平台速度:
VR_sim_ENU=[VR_sim_E,VR_sim_N,VR_sim_U]T;
(3)目标平台位置:
LT_sim_LLA=[LT_sim_lon,LT_sim_lat,LT_sim_alt]T;
(4)目标平台速度:
VT_sim_ENU=[VT_sim_E,VT_sim_N,VT_sim_U]T。
其中变量下标含义详见表1。假设在虚拟仿真场景中,雷达与目标在地球上的空间位置关系如图2 所示:

图2 雷达与目标位置关系示意图
(1)雷达与目标斜距计算
为计算雷达与目标之间的斜距,给出以下算法步骤:
1)计算雷达与目标在地球表面投影点的最短球面距离Lssd[17]:

2)计算最短球面距离Lssd所对应的球心角ΦRT:

3)计算雷达与目标在空间中的斜距DRT_sim:
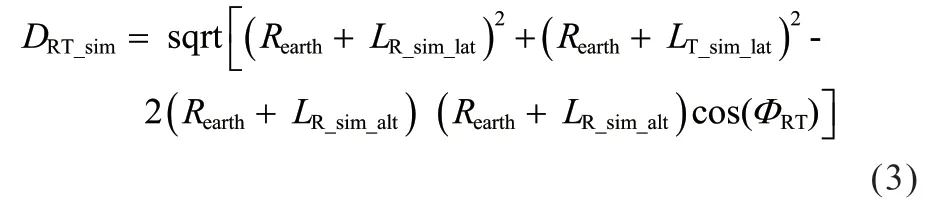
至此,获得了虚拟仿真场景中目标向对雷达的斜距。
(2)雷达与目标径向相对速度计算
不失一般性,假设地球为理想球体。一般情况下,场景仿真平台按仿真节拍周期输出仿真场景中各平台在东北天坐标系的速度矢量,为计算雷达与目标的径向速度,把雷达与目标的大地坐标系中的坐标以及在东北天坐标系下的速度都转换到地心地固坐标系中。具体转换过程为:
1)计算仿真场景中雷达与目标在ECEF 坐标系中的坐标,分别表示为LR_sim_ECEF=[xR_sim_ECEF,yR_sim_ECEF,zR_sim_ECEF]与LT_sim_ECEF=[xT_sim_ECEF,yT_sim_ECEF,zT_sim_ECEF],经计算得到:
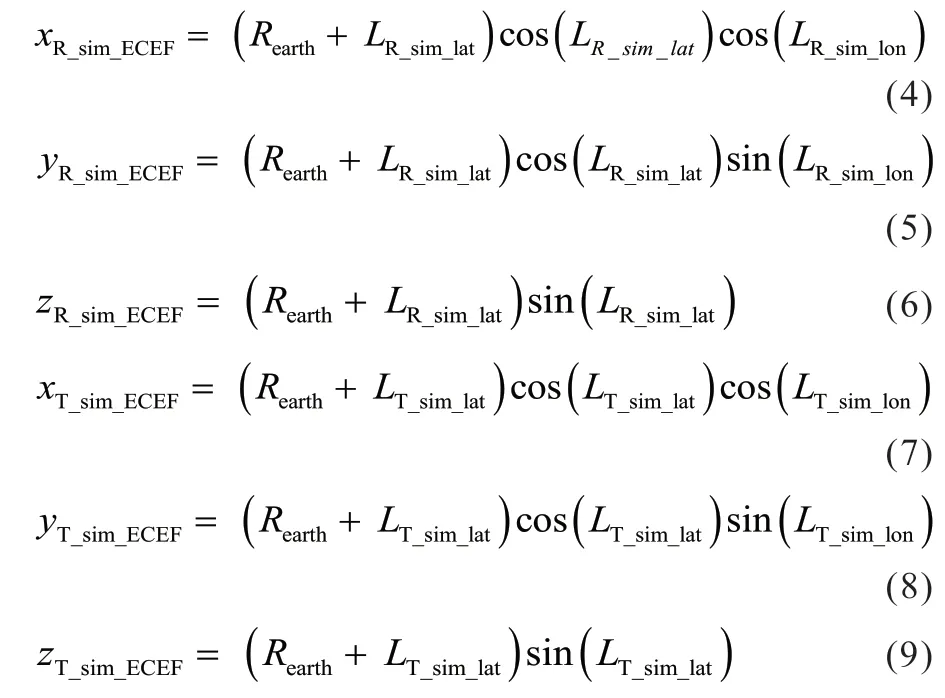
2)将雷达与目标在东北天坐标系下的速度矢量分别转换到地心地固坐标系中,分别用VR_sim_ECEF=[VR_sim_x,VR_sim_y,VR_sim_z]T与VT_sim_ECEF=[VT_sim_x,VT_sim_y,VT_sim_z]T表示雷达与目标在地心地固坐标系中的速度矢量,经计算得到:

其中,SR_sim与ST_sim分别为仿真场景中雷达与目标所在位置的东北天坐标系与地心地固坐标系之间的变换矩阵[18],分别为:

VR_sim_ENU与VT_sim_ENU分别为雷达与目标在东北天坐标系中的速度矢量。
3)分别计算雷达与目标在ECEF 坐标系中的速度矢量在雷达到目标连线之间的投影分量,分别用VR和VT表示为:

4)计算雷达与目标之间的相对径向速度VRT_sim为:

当VRT_sim大于零时,表示雷达与目标正在靠近;反之,雷达与目标正在远离。通过上述推导,获得了在仿真场景中雷达与目标之间的径向速度。
(3)雷达目标RCS 计算
雷达目标的RCS(Radar Cross Section,雷达截面积)值主要影响目标的回波功率,而RCS 的起伏模型较为复杂,包括Swerling 模型、Marcum 模型等[19],本文主要探索基于分布式场景仿真技中虚拟仿真空间与物理试验空间中的坐标转换算法,关于RCS 参数的精确模拟不在本文讨论范围之内,这里不再赘述。
综上所述,基于场景仿真平台下发的仿真参数进行计算和转换,获得了目标回波模拟设备所需参数,进而实现了在物理试验场景中产生与虚拟仿真场景中一致的雷达探测目标,完成了雷达探测目标从虚拟仿真空间向物理试验场景的坐标转换。
2.2 雷达目标点迹坐标转换
第2.1 节获得回波模拟所需参数,在物理试验空间中产生了与虚拟仿真场景一致的雷达目标回波信号,雷达形成了该目标的点迹数据。由于物理试验场地的限制,雷达与回波模拟设备的相对位置无法与仿真场景保持一致,雷达所上报的点迹数据为物理空间中的真实坐标,为满足试验评估的准确性,需把雷达上报的点迹数据转换为仿真场景中的位置数据,完成对雷达探测结果的转换,如图3 所示:

图3 目标点迹转换示意图
假设雷达上报的目标点迹坐标为LT_mea_ENU=[LT_mea_E,LT_mea_N,LT_mea_U]T,该坐标为以雷达为原点的东北天坐标系。雷达的物理站址为LR_real_LLA=[LR_real_lon,LR_real_lat,LR_real_alt]T。同时,在仿真场景中,雷达位置表示为LR_sim_LLA=[LR_sim_lon,LR_sim_lat,LR_sim_alt]T。为使物理试验空间中雷达上报的目标点迹与虚拟仿真场景中目标所在位置匹配,实现雷达探测结果的空间坐标转换,需将物理试验空间中雷达上报的目标位置转换到仿真场景中,如图3 所示。为此,给出以下算法步骤:
(1)将LT_mea_ENU、LR_real_LLA及LR_sim_LLA都转化到地心地固坐标系中,分别表示为LT_mea_ECEF、LR_real_ECEF与LR_sim_ECEF。
LT_mea_ECEF的计算公式如下:

其中,SR_real表示雷达所在位置的东北天坐标系与地心地固坐标系之间的变换矩阵,而LR_real_ECE与LR_sim_ECEF在前述分析中已经计算得到。
(2)将地心地固坐标系中的雷达位置与上报的目标位置同时平移,使雷达与仿真场景中的雷达位置重合,此时得到上报的目标所在的位置就是其在仿真场景中的点,用LT_mea_sim_ECEF表示,计算如下:

(3)将LT_mea_sim_ECEF=[LT_mea_sim_X,LT_mea_sim_Y,LT_mea_sim_Z]转换为LLA 坐标系,表示为LT_mea_sim_LLA=[LT_mea_sim_lon,LT_mea_sim_lat,LT_mea_sim_alt],通过以下公式计算得到:

通过上述推导,完成了雷达探测目标的位置从物理试验场景到虚拟仿真场景的转换,实现了雷达探测结果的坐标转换,通过比较LT_sim_LLA与LT_mea_sim_LLA可评估雷达的探测精度。
2.3 雷达波位指向参数坐标转换
在仿真场景中,雷达一般是被设置为按照一定的扫描方式进行工作[20],对于接收机装备,接收到信号与敌方雷达的波位指向有关。为了逼真地进行电磁信号模拟,需要将雷达的扫描方式与波位指向信息通过坐标转换后反馈到场景仿真平台与电磁信号仿真系统,使虚拟仿真场景与物理试验场景中的雷达波束指向与雷达姿态的相对位置保持一致,即图4 中θreal=θsim,从而让内场的电子装备能够感受到与虚拟仿真场景一致的电磁信号环境,如图4 所示。
可以获得雷达在每个仿真节拍的波位中以雷达为站心的东北天坐标系下的指向,用PBeam_real_ENU=[PBeam_real_az,PBeam_real_el]T表示波束中心的方位角与俯仰角,用表示在仿真场景中雷达的波束中心应该指向的方位角与俯仰角。同时,不考虑横滚角的情况下,假设雷达的姿态参数表示为GR_real_HPR=[GR_real_H,GR_real_P]T,分别为航向角(以正北为参考)与俯仰角,仿真场景中雷达的姿态参数为GR_sim_HPR=[GR_sim_H,GR_sim_P]T。
为满足仿真场景与物理试验场景中雷达波束指向与雷达姿态的相对位置保持一致,需要基于雷达的波位指向进行坐标转换后计算仿真场景中雷达波束的指向PBeam_sim_ENU,再通过内场试验资源模拟对应方位的电磁信号。根据图4,容易得到以下关系表达式:

通过上述分析与计算,得到仿真场景中雷达的波束指向参数。通过该参数,控制电磁信号仿真系统,可以模拟产生对应的射频信号,完成雷达波束扫描的坐标转换。

图4 雷达波位指向坐标转换关系
3 结束语
本文基于分布式场景仿真技术,对试验资源在物理试验空间与虚拟仿真空间中的空间坐标转换方法进行了探索研究,通过空间坐标转换算法将雷达装备及其探测目标的相关参数在虚拟仿真空间中与在物理试验空间中进行相互转换,使得同一仿真对象在不同仿真域保持行为一致,实现电子装备在实验室环境与异地实验资源的交互,支撑装备动态场景能力验证。本文所分析推导的空间坐标转换算法与试验思想对后续更为复杂的分布式场景仿真试验具备一定的参考价值,具有一定的理论意义与工程意义。
