山核桃采收一体无人机设计构想与矛盾分析
2022-08-09赵嘉辉张耀中夏志鹏
赵嘉辉 , 张耀中 , 夏志鹏 , 娄 轲
(山东理工大学农业工程与食品科学学院,山东 淄博 255000)
随着我国农业产业结构的调整以及林果种植面积的不断增加,林果产业已经成为我国林果产区经济发展和农民增收致富的新亮点和支柱性产业[1]。以山核桃为例,因其果壳可制活性炭,果壳、果皮、枝叶可生产天然植物燃料,总苞可提取单宁,木材可制作家具并供军工使用,总体经济价值高,逐渐成为国家重点发展的经济作物。2003年以来,在各地方政府的支持与鼓励下,山核桃的种植面积不断增加,产量稳步快速增长,科研院所及相关单位对其的研究也不断深入[2]。
山核桃一般生长在比较陡峭的山上,平均坡度为25°左右,有的甚至达35°~45°。因生长地形起伏大,大型机械进入困难,所以其生产采摘机械化水平长期处于较落后的状态,至今仍然有大量的农民通过人工爬树和竹竿敲打等原始方式进行采摘,如图1所示。经济发展模式的变化促使许 多年轻人外出打工,农村劳动力人口数量下降并呈严重老龄化趋势,在山核桃摘收的季节,常会出现伤亡情况。随着山核桃产量的不断增加,现有人力难以满足采摘需求,山核桃的采摘技术及方案的设计应得到重视,这不仅能够有效提高山核桃种植地区的机械化水平,促进山核桃走向现代化,还有利于减少安全隐患,促进社会的稳定和谐。

图1 农民采摘山核桃时的场景(图片源于网络)
1 山核桃采摘产业目前存在的问题
山核桃对采摘的时间精度要求较高。其主要在每年的九月初、白露前后成熟,过早过晚采摘都会对山核桃的产量造成影响,适时采收十分重要。由于种植地区高度高,坡度陡,采摘难度大,危险系数高,为了不错过采摘季,果农通常都会进行连续的高强度工作,会因疲劳导致大量安全事故,因此山核桃也被称为“血核桃”。由于其采摘强度大、时间精度高,果农通常会雇用大量劳动力,劳动力成本占总投入的比重高达50%,而机械化采摘效率则是人工采摘的5~10倍[3]。由此可见,林果业走向规模化已具备现实基础,但目前机械化采摘设备存在智能化水平低、体积大等问题,不适用于山地等复杂地形,无法满足现有的需求。
1.1 国内采摘设备
目前常见的辅助人工采摘设备为便携式山核桃高空采摘机[4],如图2所示。该设备主要基于山核桃果实与树枝分离的拍打力而设计,能够满足不同高度的作业需求,并且通过大量实验确定了拍打频率范围在10.00 Hz~13.33 Hz时,果实的采净率和枝芽损伤率较恰当,但一次采净率无法达到百分之百,依然需要进行二次采摘。因其需要依靠人工手持,振动对人体会产生一定的伤害,故整体效率不是很高。

图2 仿人工拍打高空便携式山核桃采摘装置结构示意图
辅助人工采摘设备还包括柴秀洪等研发的2011-36A型山核桃采摘机。该机器主要由自动感应负载变频发电机、可调节伸缩特种材质管、阻尼式采打机械头及放线器组成,调节高度为4.0 m ~13.5 m,可360°任意旋转,具备自动保护电路功能。果农不需要爬树就能轻松摘果,工作效率高出人工采打的3倍。这种设备称为旋转敲打摘果器,即通过各种不同的动力驱动采摘,减轻劳动强度,提高采摘效率,增加安全性。浙江淳安山核桃协会研究的“山核桃安全采摘安全带”如图3所示[5],其主要利用蹦极原理,同时借鉴了汽车安全带的特点,在保证安全的前提下不对人的采摘造成束缚,保证了灵活性。其能够在感受到人下坠的瞬间锁死安全绳,保证安全性。

图3 山核桃安全采摘安全带
现有的果品采摘机械从配套动力上可分为自走式、悬挂式和牵引式;从工作原理上一般分为气力振动式和机械振动式。其中,机械振动式根据产生振动方式不同又分为振摇式、撞击式和切割式[6]。机械振动式对树干、树根等都会造成损害,最后可能会导致果品产量下降。现有的山核桃采摘器为伸缩式林果采摘机器臂[7]和爬树式山核桃采摘机器人[8]。 浙江农林大学的李小亮[9]通过对山核桃树各级枝干构建动力学模型,获得了三种不同胸径范围的山核桃树的振动角频率,最后通过大量的实践分析得出了“基于振动的便携式山核桃采摘样机”,其结构如图4所示。其基本工作原理就是利用汽油机驱动,通过钢丝软轴和传动轴把扭矩传动齿轮机构,当汽油机输出转速达到一定时,偏心大齿轮所带动推杆产生的振动力符合将树枝上果实振落的条件,从而进行振动采摘。但其采用的还是机械振动法,长期使用会对人和树枝造成一定的伤害,并且采净率在85%左右,无法达到一次性清零的效果。
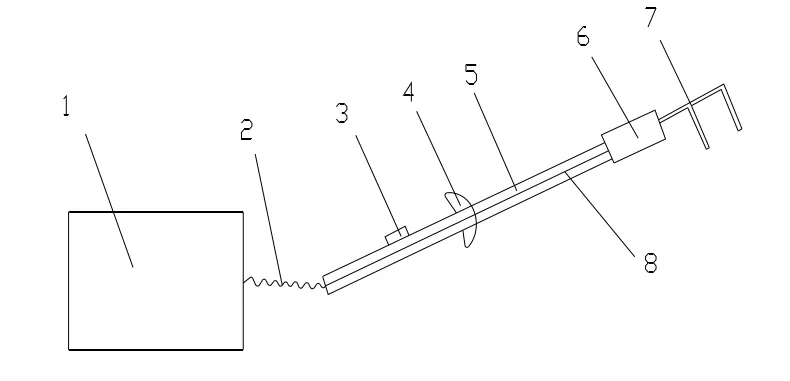
图4 基于振动的便携式山核桃采摘样机
1.2 国外采摘设备
澳大利亚的核桃由于良好的自然条件和技术支持,市场潜能很大。其通过喷施乙烯的办法使核桃的成熟期趋于一致,一次性采摘率达到100%。早在1999年,澳大利亚核桃采摘已基本实现了全程机械化采收,其采摘过程如下:先由振动落果机将大部分核桃落到地面,接着用清扫集条机将它们聚集,再由捡拾清选机将它们清选后成箱。通过此过程,生产效率将达到最大化。采摘机械主要是由美国、加拿大和澳大利亚等国生产的振动落果机、清扫集条机和捡拾清选机[10]。
2 设计概念构想与验证
2.1 产品初步构想理念
本研究基于对山核桃的采摘需求、国内地形特征等现有状况的调研,提出了智能化采收一体无人机的构想,如图5所示,其中伸缩杆采用如图6所示的管状伸缩杆[11]。基于其伸缩的性能添加智能控制系统,可减小整机体积,适应果树枝叶茂密的状况;机身增添两个摄像头,利用机器人视觉实现双目立体视觉数据,通过三角测量原理确定山核桃的位置;利用机械手旋转采摘,将果实与果柄分离,并将其放入感应盒中。为避免山核桃在空中意外洒落,当机械手采摘到山核桃时会自动打开开口,等到采摘完毕就自动关闭,待收纳盒重量达到一定限度时,无人机返航将山核桃运回指定位置,盒子下开口打开,倾倒山核桃。循环往复,直至采摘完毕。

图5 采摘一体机设计构想

图6 管状伸缩杆
2.2 应用TRIZ理论解决概念设计中的问题
上述概念设计在实践中存在着明显的待解决问题,例如无人机体积大小和果树茂盛枝叶是否有矛盾,果树枝叶是否对飞行的无人机有干扰等等。由苏联Genrich Altshuller团队于1946年开始研究的TRIZ理论(发明问题的解决理论)[12],对产品的创新设计具有重要的指导意义。该理论体系主要包括创新思维方法与问题分析方法,技术系统进化法则,技术矛盾解决原理,创新问题标准解法,发明问题解决算法ARIZ,基于物理、化学、几何学等工程学原理而构建的知识库。其中,“技术矛盾解决原理”适用于解决山核桃采收一体无人机的矛盾。
1)定义技术矛盾。技术矛盾1:无人机高空飞行可以解决因地形地势复杂,大型机械无法进入的问题,但是山地地形、果树枝叶、复杂气流会对无人机的飞行造成一定的影响。技术矛盾2:采摘机械手对山核桃的采摘效果最佳,相比振动而言,对枝叶没有伤害,但是无人机旋翼产生的下压风场和气流会对山核桃树的枝干造成振动和损伤。
2)确定技术矛盾中欲改善和被恶化的参数,建立问题模型。矛盾1:改善的参数,行进便利;恶化的参数,无人机稳定性。矛盾2:改善的参数,采摘效果好;恶化的参数,枝干损伤率。
3)将改善和恶化的参数归纳为阿奇舒勒通用工程参数。矛盾1中,改善的参数为“行进便利”,即改善的参数是第14参数“速度”(运动物体的速度,单位时间物体活动过程或作用);恶化的参数为“无人机稳定性”,恶化的参数是第13参数“结构的稳定性”(系统的完整性及系统组成部分之间的关系,整个物体或系统受外在因素影响而维持不变的能力)。问题就变成了参数14和参数13之间的矛盾即“速度”与“结构的稳定性”之间的矛盾。
矛盾2中,改善的参数为“采摘效果好”,即改善的参数是第38参数“易受伤性”(一个物体或系统保护自己或它的用户不受危害的能力,一个物体或系统抵抗外部损坏的能力);恶化的参数为“枝干损伤率”,恶化的参数是第31参数“有害的副作用”(物体产生的有害因素造成系统效应或完成功能质量降低的有害因素,这些有害因素来自物体或系统操作的一部分)。问题就变成了参数38和参数31之间的矛盾,即“易受伤性”和“有害的副作用”之间的矛盾。
4)寻找改善和恶化通用工程参数对应在阿奇舒勒矛盾矩阵中重叠的部分,确定发明原理。将参数14和参数13代入矛盾矩阵,如表1所示,查找两对技术参数行列交汇处对应的创新原理中的28-信息的遗漏,2-静止物体的重量,3-运动物体的尺寸,5-运动物体的面积,33-兼容性或连通性,18-功率。将参数38和参数31代入矛盾矩阵,通过表1查找两对技术参数行列交汇处对应的创新原理中的35-可靠性,31-有害的副作用,1-运动物体的重量,33-兼容性或连通性,16-运动物体消耗的能量,21-结构的稳定性,11-信息(资料)的数量。

表1 阿奇舒勒矛盾矩阵表
5)利用发明原理确定解决技术矛盾的方案。阿奇舒勒矛盾矩阵给出的原理不一定能够解决本设计中的问题。通过问题分析转化为TRIZ的一般问题,再利用发明原理、技术效应或进化理论得到问题的一般解,而后通过具体问题具体分析得到矛盾的特解。根据TRIZ矩阵中列出的先后顺序,对所建议的发明原理进行分析并选择适用的发明原理。通过分析,选择了最合适的发明原理:33-兼容性或连通性、5-运动物体的面积、31-有害的副作用。首先,基于解决矛盾1的发明原理33-兼容性或连通性,该系统和其他系统能够联合推出解决方案1:
在设计中配备三个雷达系统装置,分别为前置动态雷达、上视雷达和仿地雷达。利用物联网、人工智能以及机器视觉等智能化技术,让其在复杂的山区环境中有效规避风险,保证自己的稳定性。
其次,基于解决矛盾1的发明原理5-运动物体的面积(面积是指物体内部或外部的任意尺寸),推出解决方案2:
通过扩大无人机的面积来提升其抗风能力,也可将四轴的无人机提升为六轴。通过旋转带螺距的桨叶产生下压风形成升力,做方位移动,通过改变反方向电机转速提高升力,使飞机产生倾角,利用升力被分解为向后的推力以及向上的升力来提升其稳定性。
最后,基于解决矛盾2的发明原理31-有害的副作用(有害的副作用是指造成系统效应或完成功能质量降低的有害因素,这些有害因素来自物体或系统操作的一部分)而推出解决方案3:
为无人机的旋翼添加保护罩作为其挡板,以防止高速旋转产生的气流对山核桃树的枝叶造成损伤。
6)方案评价。方案评价表如表2所示。方案1增加了成本的投入,且实施的难度较大,但是带来的效果会提升;方案2虽然增加了稳定性,但是由于面积变大以及轴变多,会导致其便携性降低;方案3虽然能够对山核桃树的枝叶形成保护,但可能会增加无人机的重量,也需要根据特定形状的空气动力学特性重新设计无人机,目前来看成本较高,实施起来相对困难。

表2 方案评价表
3 总结与展望
山核桃是我国大力发展的经济作物,但是由于生长地形限制,其采收机械化处于较低水平。自无人农场的概念提出以后,本研究构想设计了无人机摘收一体机,利用TRIZ理论对技术矛盾分析原理进行了初步分析,且得到的解决方案都各有优劣,还需进一步的验证。要得到最优的创新方案,还要后续配合TRIZ理论的创新问题标准解法,发明问题解决算法ARIZ,基于物理、化学、几何学等工程学原理而构建的知识库进行下一步验证。
本研究后续会通过实地调研法、观察法、访谈法等对山核桃种植地区的现实情况进行总结归纳,获取模型构建所需的全部数据,再运用TRIZ理论对其他几步进行方案优化,最终借助MBD技术[13]构建三维模型,以直观准确地展示产品的工艺信息,全方位模拟构造实体模型,减少后期的损失。还可通过MBD模型对数据进行整合,为后期的批量化生产做好准备。除已经展示的功能之外,日后还可将修剪枝叶、授粉、洒水等功能进行整合,研制多功能一体化无人机。