网联环境下混合车流的速度协调优化方法研究
2022-08-08宋晓晨曲大义贾彦峰胡春燕刘浩敏
宋晓晨, 曲大义, 贾彦峰, 胡春燕, 刘浩敏
(青岛理工大学 机械与汽车工程学院, 山东 青岛 266520)
0 引言
高速公路车辆在行驶过程中受前车、道路状况及交通信号等多因素影响出现车辆走走停停现象,继而引发交通震荡,一定程度上降低了车队整体通行效率,造成车辆拥堵,同时也给驾驶人带来不好的行车体验。随着智能车路协同发展,交通学者们对交通震荡产生和传播机理的深入研究越来越多。交通震荡是由于前导车或外部环境刺激的交通加减速变化而导致的车辆在驾驶行为“走”和“停”之间的转换,大多伴随着交通拥堵,走走停停是最明显的特征。Laval等[1]描述了交通震荡的产生以及车辆走-停的转换,发现激进和保守型驾驶行为是造成这种转变的原因。Salehikalam等[2]指出骤然减速和换道行为是造成交通震荡的形成与传播的主要原因,在Newell模型的基础上建立改进的人工神经网络模型,分析跟驰行为的复杂特点。黄永现[3]以交通震荡演化特性为研究目标,明确速度内生震荡的自发形成、传播与发展,并指出驾驶员具有强烈的内在异质性。Chen等[4]证实震荡幅度增长与滞后幅度的相关性,明确建立了驾驶行为特性与交通滞后和震荡传播之间的联系。李帅[5]基于元胞自动机跟驰模型,从跟驰行为角度分析了交通震荡增长的产生和传播机理,为抑制速度震荡奠定了良好的基础。Li等[6]建立了一个能够表征非线性车辆跟驰模型的交通震荡特性的数学框架,在此基础上提出一种量化震荡传播幅度的新方法,能够准确预测复杂交通环境下的车辆震荡特性,进一步抑制震荡传播,缓解交通拥堵现象。鲁斌[7]基于驾驶行为建立了支持向量回归的车辆跟驰模型,利用仿真再现了交通震荡的产生和传播规律。Chen等[8]、Saifuzzaman等[9]和王晖[10]从驾驶行为角度出发研究交通迟滞与交通震荡的特性;洪家乐等[11]研究发现驾驶人反应强度对交通震荡有一定影响。张娟[12]通过累计移动序列法研究了瓶颈路段的交通震荡增长特性,验证震荡幅度与移动时间步长的关系。荆彬彬等[13]以提升道路通行能力为目标,引入速度引导策略,对干道进行双周期绿波协调控制。Carlson等[14]发现采用可变速度限制策略(VSL)结合匝道控制措施,可有效提升道路交通流效率。Chen等[15]提出基于运动波理论的VSL,有效提高在稳定队列和震荡队列2种情况下的高速公路瓶颈流量率,实现上游队列更平滑的过渡。
综上所述,现有的研究大多都是从速度协调控制策略方面抑制速度震荡,但驾驶特征复杂多样带来许多不确定性,为速度协调增加了难度。随着智能车路协同系统的发展和CAV技术的相对成熟,出现了很多利用CAV技术对交叉口车辆速度引导的策略[16-18],车联网环境下,常态是CAV与HV共存的混合交通流,本文针对高速公路混合交通环境,利用智能车路协同技术,通过预测排队车尾HV运行轨迹,引导上游CAV平稳汇入下游队列,以抑制交通震荡的传播,实现交通流稳定,提升驾驶舒适度。
1 优化方法设计
本文针对智能网联混合车流环境提出CAV速度控制方法,利用CAV技术和车路信息处理设备检测下游车队速度震荡和拥堵,利用标记信息合理控制上游CAV行驶速度,进而规划CAV行驶轨迹,达到抑制速度震荡产生及传播效果,消除高速公路瓶颈路段交通拥堵,使上游队列平稳合流到下游队列,提高道路交通流稳定性。该控制方法主要包含3个部分:
1.1 场景设定
设定适合速度控制方法的场景,CAV和HV混合行驶的高速公路单车道环境,CAV是具有感知、决策系统的智能网联自动驾驶汽车,能够通过车载通信设备实现信息共享,而HV是传统人工驾驶车辆。假设高速公路上有2个车辆簇C1和C2,如图1所示,每个车辆簇都是由CAV和HV混合,且由CAV首车领导,场景设定示意图如图1所示。本文只研究车辆簇C1以HV车辆结尾,通过预测尾车HV的运行轨迹,引导规划车辆簇C2中CAV行驶轨迹。

图1 场景设定示意图
1.2 HV轨迹预测
通过CAV传感技术及路侧单元感知模块对下游尾车HV运行轨迹进行预测,假设宏观交通量以三角基本图为依据发生变化,并在预测过程中与其平衡状态保持一致,采用Newell跟驰理论预测行驶轨迹。
1.2.1 CAV轨迹偏移
CAV通过传感技术及路侧单元感知信息,实时共享运行轨迹信息,来帮助预测前方车辆行驶轨迹。令HV轨迹的预测函数为r′(t′),∀t′≥t。假定交通流以波的形式传播到上游,其速度为w,由于交通流波动在传播过程中逐渐衰减,因此通过传感器记录的每组车流CAV数量,对下游CAV轨迹偏移,基于简化的Newell模型,将其在轨迹图中按照后向波传播方向进行移动,偏移轨迹如图2所示。

图2 偏移轨迹
1.2.2 偏移修正
考虑到偏移轨迹为函数组,由路侧单元获取的信息会随时间变化实时更新,如图2所示,某些决策点若发生中断,可能造成轨迹函数不连续,车流产生不同程度的震荡,因此采用最近邻插值算法[19]拟定中断合并点,以建立连续轨迹预测函数,将得到的连续的CAV预测轨迹函数表示为r(t′),∀t′≥t,如图3中虚线所示。

图3 轨迹预测函数及修正后的偏移轨迹
由于HV存在一定的反应时间,为提高策略安全性,不得不考虑反应时间累计对预测轨迹函数的误差,引入变量τ和s0分别表示HV行驶过程采取加减速操作的反应时间和交通瓶颈区内的车间距,对HV轨迹预测函数进行更精确的修正。
r′(t′)=r(t′-τ)-s0,∀t′≥t。
(1)
根据公式(1)得到调整后的HV轨迹的预测函数r′(t′),∀t′≥t,如图3中实线所示。
1.3 CAV速度引导
根据HV预测轨迹规划CAV车辆运动轨迹,只研究在时间方面的轨迹规划。设定场景为高速公路某路段,假定车流簇均由CAV引导行驶,此过程车辆的位移与速度随时间的变化如图4所示。考虑到前方HV受到速度限制,出现不同变速状态,当HV由高速运行状态短时间内转变至持续低速运行状态,后方CAV只能通过持续减速的跟驰决策并入下游车流,最后完成与HV同步匀速行驶。此过程只能小幅度减缓交通震荡的增长,本节选取的速度引导场景为下游HV受到条件干扰而车速骤减,能够在短时间内保持稳定速度行驶,假设引导区的全部车辆保持匀速和匀变速行驶。CAV的运行状态由以下3个阶段组成:缓冲区、速度引导区和平稳期。
1.3.1 缓冲区(A区域)
缓冲区可对前方车辆轨迹进行预测同时对CAV的轨迹进行规划。当CAV进入引导区,意味着缓冲区阶段结束。在图4中,v0为CAV在引导区的初始时刻速度;TA为缓冲区持续时间;xA为CAV行驶位移。

图4 上游车流簇中CAV首车的速度引导过程图
1.3.2 引导区阶段一(B区域)
引导区根据缓冲区阶段得到的规划轨迹,对运行车流进行速度引导,以削减交通震荡带来的影响。在引导区B区域,CAV的速度逐步调整为vl,意味着该阶段结束,即将进入匀速阶段,可得
(2)
(3)
式中:TB、xB分别为此阶段的时间和位移;a为车辆加速度;v0为CAV在引导区的初始时刻速度;vl为匀速行驶速度。
1.3.3 引导区阶段二(C区域)
该阶段内CAV进入匀速行驶阶段,以车速vl匀速行驶,通过前方车辆位置及车辆运行状态确定合理的速度vl,可得
xC=vlTC,
(4)
式中:xC、TC分别为此阶段CAV行驶位移和运行时间。
1.3.4 引导区阶段三(D区域)
CAV经过上一阶段的匀速行驶,进入新的速度引导阶段,随着前导车HV的速度变化而调整自身行驶速度,以实现CAV能够在特定时间和位置与HV同步汇入下游车流,并保持稳定速度平稳跟驰运行,可得
(5)
(6)
同上,xD、TD分别为对应的CAV位移和时间;vh为前导车HV的行驶速度;a′为车辆的加速度。
1.3.5 最优车速引导
基于以上各阶段车辆运行状态,构建车速引导模型,由此得到CAV的速度轨迹函数vl(t)和位移轨迹函数xl(t)。由于CAV在掌握前方HV预测轨迹后,可通过多种速度轨迹协调方式汇入前方车流,如图5所示。为最大可能减弱交通震荡的演化影响,实现车流平稳运行,该设计方法将匀速状态持续最长的轨迹作为最优速度引导函数。
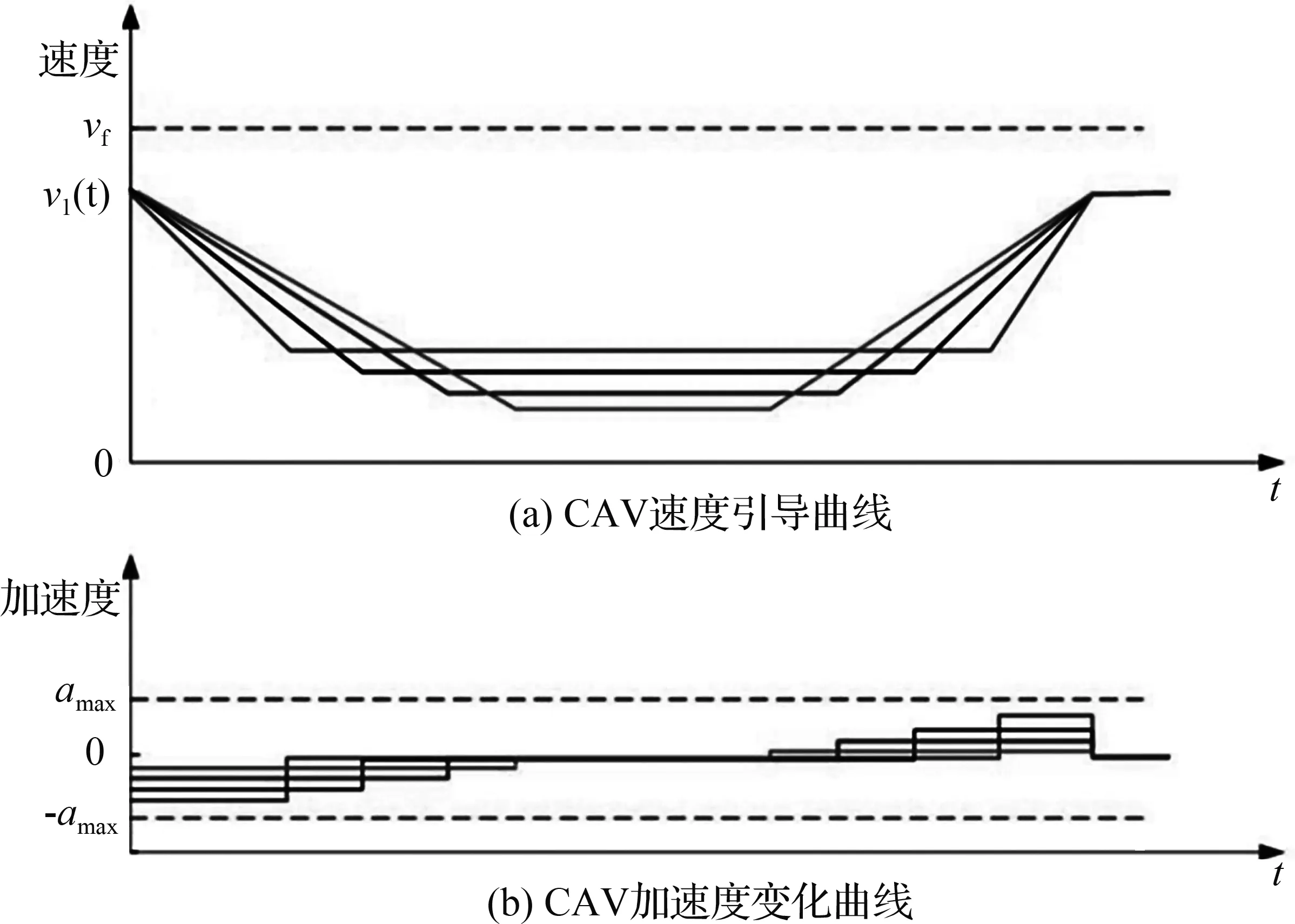
图5 几种不同的CAV速度/加速度曲线
设计方法还考虑到车辆特性、运行舒适程度以及运行安全,引入约束条件以限制车辆加速度和与前导车之间的需求安全距离,并要求平稳运行后的行驶速度不能高于前导车速度vh与车道最高限速vf,约束条件满足:
(7)
式中:h为CAV稳定跟驰前导车时的安全距离;aμ为CAV急刹车时的车辆加速度,aμ=μg,μ为高速公路摩擦系数,g为自由落体加速度;lv为CAV车长。可求得速度引导函数vl(t)。
(8)
对其进行积分得到位移轨迹函数xl(t)。
(9)
通过对式(7)、(8)、(9)综合求解可以得到合适的速度引导轨迹和位移轨迹函数。当CAV与前导车HV间隔距离较小,为满足速度引导曲线与前导车的安全距离约束,试通过随机OV跟驰模型对CAV速度引导。
2 数值仿真分析
为分析检验速度协调优化方法的有效性,利用MATLAB软件实现数值仿真实验。将高速公路的瓶颈位置设在lB=475 m,默认参数值设置为:ΔT=2 s,vf=120 km/h,τ=0.65 s,w=4.64 m/s,s0=6.5 m。为引导CAV运行速度,假设HV和CAV均采用OV跟驰模型行驶,满足公式
(10)
(11)

数值实验设置初始模拟,模拟一组包含10辆车的车流簇运行轨迹,如图6中虚线所示,为分析车流簇中不同CAV渗透率对抑制交通震荡的影响,分别设置CAV渗透率为20%、40%、60%的3组对照组,如图6中(b)、(c)、(d)所示,并构造一组纯人工传统驾驶车辆HV的对照组进行实验结果对比,如图6(a)所示。

(a)对照组
对仿真实验结果进行分析,对比图6(a)、(b),发现上游CAV的行驶速度可通过该协调优化方法进行调节,实现小幅度变速平稳汇入下游交通流,表明CAV车流能够通过速度调整有效抑制交通震荡的产生与演化,保证交通流运行平稳。对比图6(b)、(c)、(d)发现,车流中不同的CAV渗透率对交通震荡产生和传播的抑制效果不同,且车流CAV渗透率越高,交通震荡抑制程度越大,越能更快实现平稳运行。
3 结论
为抑制交通震荡的产生及传播速度,提升驾驶员舒适体验感和车辆通行效率,利用车路协同技术,感知CAV实时运行轨迹以预测尾车HV轨迹变化趋势,进而协调优化上游CAV速度变化,以平滑的速度顺利汇入下游交通流,通过数值仿真实验发现,所设计的速度协调优化方法能有效抑制交通震荡的产生和传播,且交通震荡抑制程度与网联车辆CAV渗透率呈正相关,即CAV渗透率越高,交通震荡抑制程度越大,越能明显提升交通流稳定性。
