三自由度上肢康复外骨骼结构设计与仿真
2022-08-08丁江陈磊付兵农卫航林德智
丁江,陈磊,付兵*,农卫航,林德智
(1.广西大学 机械工程学院,广西 南宁 530004;2.广西制造系统与先进制造技术重点实验室,广西 南宁 530004;3.广西机电职业技术学院 机械工程学院,广西 南宁 530007)
0 引言
脑卒中因中枢神经受到损伤而具有高致残率、高发病率的特点,目前已经成为中老年人运动功能障碍的重要原因[1]。患者可通过康复训练重新建立患肢与受损中枢神经之间的联系,实现对肢体的有效控制[2]。康复外骨骼在降低康复医师工作负担的同时,还具备更加科学合理的康复训练活动,能快速、有效地恢复患者的运动能力[3-4],因此,国内外科研机构和康复医疗机构进行了许多可穿戴上肢康复外骨骼的相关研究[5]。
Li等[6]基于人体工程学提出一种上肢康复外骨骼,然而引入的被动关节显著降低了系统的响应速度以及减小了外骨骼在静态和动态模式下人体上肢与外骨骼的作用力。Islam等[7]研究了一款七自由度双重功能上肢康复外骨骼,能够根据患者的上肢损伤程度自动切换康复模式。Meng等[8]提出了一种轮式电动上肢康复外骨骼,能够辅助患者完成日常活动,但该装置结构设计较为复杂,成本偏高,不适合批量定制。Lessard等[9]提出了一种用于上肢康复的软质外套,通过更加柔性的方式顺应人体上肢的自然运动,但其刚度有所下降。徐晨阳等[10]研发了一种钢丝绳索驱动的CURE-7康复机器人,通过台架上的电机驱动线轮,控制各关节的运动,不过缆绳的布置需要经过严格计算。Deng等[11]设计了一种双臂对称式外骨骼,采用了分层控制方案,实现了康复外骨骼机械臂与人体上肢协同操作,有效提升了人体上肢康复效果。易安东等[12]针对脑卒中患者手指功能康复问题,设计了一种基于直线电机驱动的手部外骨骼,具有轻便易携带的特点。李翌等[13]提出了一种主动式上肢外骨骼力量训练器,引入了运动跟随机构和信号采集与反馈系统,有效解决了传统主动式康复训练外骨骼未能提供人体上肢肌肉群的全方位训练不足。Wu等[14]提出了一款具有五自由度的肘-腕康复外骨骼,利用齿轮轴承机构、曲柄滑块机构、肘-腕球面轴承机构更好地满足了前臂的精细运动康复需求,但外骨骼装置功能模块较多,结构较为复杂。
为了简化结构,降低成本,本文中设计了一种可批量定制的轻量化三自由度康复外骨骼。首先对康复外骨骼进行了正运动学分析,并验证了其正确性;其次进行了工作空间的计算,得到了上肢康复外骨骼的工作空间点云图;最后进行了仿真分析实验,验证了上肢康复外骨骼结构设计的合理性,为后续康复外骨骼的结构优化以及动力学分析提供了理论基础。
1 结构方案设计
1.1 上肢外骨骼康复功能需求
为了更好地满足脑卒中患者康复功能需求,首先,驱动电机要有足够的运动精度,保证患者在运动过程中能够精准拾取目标物体;其次,康复外骨骼应具有体积小、重量轻等特点,以便满足患者不同场合的康复训练要求;然后,还需进行人体工程学分析,使其具有美观、安全、耐用等优点;最后,康复外骨骼应降低有效成本,以便实现康复外骨骼设备装置的“平民化”。
1.2 康复外骨骼结构设计
康复外骨骼的设计灵感来源于人体上肢多关节运动。如图1所示,人体上肢的自由度为七自由度[15],分别是肩关节内收、外展[图1(a)、(b)],肩关节外旋、内旋[图1(c)、(d)],肩关节屈曲、伸展[图1(e)、(f)],前臂旋前、旋后[图1(g)、(h)],肘关节屈曲[图1(i)],腕关节外旋、内旋[图1(j)、(k)],腕关节屈曲、伸展[图1(n)、(m)]。上肢运动角度[16-17]范围见表1。

(a)肩内收 (b)肩外展 (c)肩外旋 (d)肩内旋 (e)肩屈曲 (f)肩伸展

表1 人体和机械臂上肢各关节运动角
由于康复外骨骼肩部安装空间有限,为了简化机构并且满足脑卒中患者的基本康复训练要求,设计了一款三自由度轻量化康复外骨骼。该康复外骨骼的肩部采用屈曲-伸展和内收-外展2个自由度,肘部采用屈曲-伸展单个自由度。如图2所示,从左到右共有3个关节,每个关节安装有一体化机械臂关节电机(包含电机、驱动器、编码器、谐波减速器)。关节1完成肩部的屈曲-伸展,关节2完成肩关节的内旋-外旋,关节3完成肘部的屈曲-伸展。具体结构参数见表2。

图2 三自由度康复外骨骼

表2 康复外骨骼结构设计参数
为了满足驱动力矩和位置精度要求,肩关节和肘关节选用体积小的24 V直流无刷电机,肩部屈-伸康复训练活动的设计驱动力矩为49 N·m,肩部内收-外展康复训练活动的设计驱动力矩为36 N·m,肘部的屈曲-伸展的设计驱动力矩为28 N·m。此外,为了防止驱动力矩过大,在关节处可设置限位开关。材料选用轻量化且强度足够的6061铝合金。
1.3 康复外骨骼价格对比
表3为目前市面上主流康复外骨骼设备的市场价格。由表可以得出,康复外骨骼的售价最高可达数百万元,最低也需要数万元,普通患者无法负担昂贵的设备购置费用。因此,本课题组设计了一款结构简单、价格低廉的三自由度康复外骨骼设备。该设备既能满足脑卒中患者日常的康复需求,同时该上肢康复外骨骼的价格相更加亲民,极大地降低了消费者购买负担,能够更好地顺应康复外骨骼市场的“平民化”趋势。

表3 康复外骨骼的市场价格
2 康复外骨骼运动学分析
2.1 康复外骨骼正运动学分析
为了得到各关节的相互位姿关系以及康复外骨骼末端姿态,采用修正D-H参数法建立了康复外骨骼连杆坐标系。如图3所示,基坐标系与肩关节坐标系重合,肩连杆长度为L1,大臂连杆长度为L2,小臂连杆长度为L3。根据D-H坐标系连杆之间位置关系得到的机械臂连杆参数见表4。其中i为关节序号,θi为关节转角,αi-1为连杆i-1扭转角度,ai-1为连杆i-1的长度,di为连杆偏距。

图3 康复外骨骼坐标系

表4 外骨骼D-H参数
康复外骨骼D-H坐标系中相邻关节坐标系i-1和i之间的位姿变换矩阵:
(1)
通过3个位姿矩阵的乘积得到康复外骨骼末端的姿态矩阵如下:
(2)
式中康复外骨骼的末端位置向量为
(3)
且:
(4)
式中:
(5)
为了验证运动学方程的正确性,将康复外骨骼的初始状态修改为θ1=θ2=θ3=0,并代入式(3)得到康复外骨骼末端位姿矩阵为
(6)
2.2 康复外骨骼工作空间分析
根据康复外骨骼末端位姿矩阵以及表4中各关节运动范围角,通过MATLAB编程计算工作空间运动范围,得到康复外骨骼的工作空间点云图,如图4所示。

(a)三维工作空间
康复外骨骼工作空间范围为x∈[-500,500]mm,y∈[-500,500]mm。结果表明,三自由度康复外骨骼满足普通成年人手臂长度要求。实时运动空间轨迹表明,本文提出的三自由度康复外骨骼能够很好模拟人体上肢轨迹运动范围。
3 运动学仿真分析实验
将去掉螺栓以及螺栓孔的外骨骼模型导入ADAMS仿真模块,设置连杆材料为6061铝合金,添加重力加速度以及人体手臂的重量,设置固定副、转动副和驱动副,并在关节添加相应的驱动函数,得到肩关节、肘关节运动曲线图,如图5所示。图5(a)中上肢康复外骨骼关节角速度在同一时间段内变化趋势一致,曲线平滑连续,有利于改善脑卒中患者在康复训练活动中的舒适性。图5(b)为上肢康复外骨骼的肩关节和肘关节的角加速度曲线,在整个过程满足康复训练活动要求。肩关节和肘关节的角加速度从0短时间达到最大值,上肢康复外骨骼整体为柔性冲击,不会对患者手臂产生伤害。图5(c)、(d)为康复外骨骼末端在肩关节和肘关节复合运动下速度、加速度随时间变化关系图。设置好关节的驱动参数见表5。得到关节力矩与时间变化关系图,如图6所示。最大力矩为28 N·m,在设计的驱动力矩范围之内,因此也验证了电机选型的合理性。

(a)关节角速度随时间变化曲线

表5 关节驱动参数
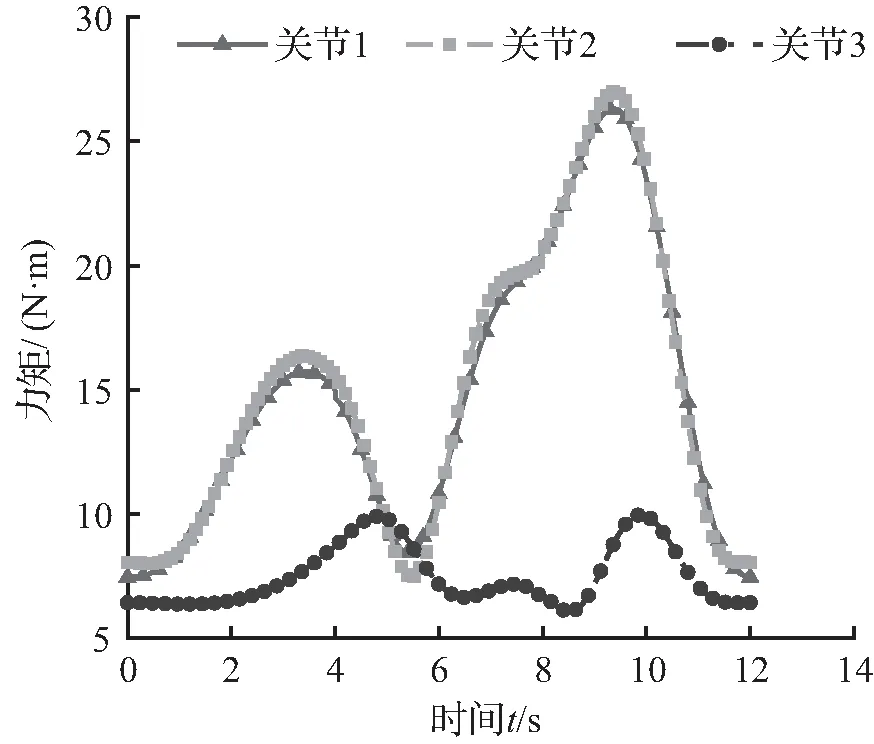
图6 关节驱动力矩曲线图
4 结语
为了满足脑卒中患者康复训练要求,根据人机工程学和康复功能需求分析设计了一款可批量定制、价格低廉的新型三自由度康复外骨骼。首先,利用修正D-H法建立了上肢外骨骼的连杆坐标系,得到了康复外骨骼的D-H参数表;其次,推导了运动学方程并给出了验证,利用蒙特卡洛法绘制了三自由度康复外骨骼的运动工作空间点云图,更好地模拟了康复外骨骼的实际工作空间;最后,利用ADAMS对康复外骨骼进行了运动学仿真实验分析,结果表明,康复外骨骼能够满足脑卒中患者日常康复训练活动,也为后期康复外骨骼动力学分析及结构优化提供参考依据。
