一种基于BP神经网络的堆煤检测方法
2022-08-08范喜林
范喜林
(中煤科工集团 常州研究院有限公司,江苏 常州 213015)
带式输送机在煤矿生产作业中广泛应用,胶带堆煤事故时有发生。当堆煤事故发生时,若未及时处理将带来严重的安全隐患,同时会给煤矿企业带来较大的经济损失。因此,建立有效、可靠的带式输送机堆煤检测系统具有极其重要的意义[1-2]。
目前,大多数煤矿企业采用堆煤传感器检测带式输送机运煤状态,大致可分为三种,分别基于行程开关、水银开关、电极式原理实现。以上传感器虽能实现堆煤状态的检测。但煤矿井下煤尘较多、湿度较大,行程开关与电极式原理传感器易受煤尘、湿度影响出现误检;水银开关无法全方位检测,容易出现漏检。煤矿井下环境的复杂性造成堆煤传感器灵敏度不高,可靠性较差。为了有效解决现有堆煤检测方法的不足,本文提出一种基于BP神经网络的方法实现对带式输送机运行时堆煤状态的检测。
1 BP神经网络识别算法
1.1 BP神经网络简介
神经网络的研究始于20世纪40年代,由美国科学家McCulloch和Pitts共同提出。神经元被视为二值开关,不同的组合方式可以实现不同的逻辑运算。这种“逻辑神经元”模型又被称为MP模型(网络神经元模型),MP模型的提出打开了神经网络研究的大门。
神经网络的发展历程大致为:1947—1969年为发展初期,在此期间许多类别的神经元模型和学习规则被科学家们相继提出;1970—1985年为神经网络研究的低谷期,期间,Hopfield教授提出了能量函数的概念,同时提出了用于联想记忆和优化计算的方法。1984年,Hiton教授提出Boltzman模型;1986年,McClelland等提出误差反向传播的神经网络,简称BP(back propagation)网络。
如今,BP神经网络已经成为广泛使用的网络。1987年至今为其发展期,在此期间,神经网络发展受到国际上众多研究者们的重视,各个国家都对此展开相关研究,从而形成神经网络发展的另一个快速发展期。
1.2 BP神经网络原理
BP神经网络[3-4]是一种按照误差反向传播(误差反传)的多层前馈网络,其算法被称为BP算法。该算法的基本思想是梯度下降法(Gradient Descent),得到最小化的损失函数和模型参数值,最终使网络的实际输出与期望输出的误差、均方差都达到最小。
BP神经网络不仅具有输入层、输出层的节点,而且还有一个或多个隐藏层节点。对于输入端,第一个转到隐藏层的节点,通过每个单元的激活函数(也称为动作函数)来操作,在操作之后,隐藏节点的输出信息传播到输出节点,最后得到输出结果。
BP神经网络使用梯度下降法,梯度下降法是基于误差函数的梯度,每两个节点权重和计算重量误差函数的贡献,然后根据梯度信息来修改权重以达到学习的目的。BP网络可以有多个隐藏层,其中h隐藏层,根据前馈顺序,隐藏层节点是:w1,w2,……,wh+1.BP神经网络模型结构如图1所示。
BP神经网络识别算法核心部分需要经过输入信号的前向传播和误差反传两个必要过程。即计算误差输出时,按照从输入到输出的方向进行,而调整阈值和权值则需要从输出到输入的方向进行。正向传播时,输入端信息通过隐藏层作用于输出节点,经过非线性变换(Nonlinear transformation),产生输出结果,如果实际输出与期望输出差别较大,则转入误差的反向传播过程,将误差通过隐藏层向输入层逐层反传,误差分摊给各隐藏层单元。这样,获得的误差信号即可作为各隐层调整权值的依据。使误差沿梯度方向下降,经过反复训练过程,网络自动确定与最小误差相对应的网络参数(权值和阈值),训练即停止。此时,经过训练的神经网络即可以对类似样本的输入,进行自行处理,使得输出结果误差最小。

图1 BP神经网络模型结构
1.3 BP神经网络计算过程
BP神经网络输入层与输出层之间的若干层神经元被称为隐藏层单元。它们与外界没有直接的联系,但是其状态的改变,则能影响输入与输出之间的关系。BP神经网络的计算过程分为正向和反向两个部分。正向传播为,输入端信号从输入单元层经过隐藏单元层逐层处理,转向输出层。如果在输出层不能得到期望的输出,则网络自动转入反向传播过程,将误差信号沿原路返回,通过修改各隐层神经元的权值,使得误差信号最小。
2 堆煤检测实验
2.1 堆煤检测方法的设计
本文所提出的基于BP神经网络的堆煤检测方法包括以下三个步骤:
1) 堆煤场景数据集采集:采用矿用摄像仪获取得到的堆煤视频场景,拆分为堆煤场景图像,以此作为堆煤场景数据集;
2) 特征值提取:根据堆煤场景数据集图像,采用HOG特征提取算子进一步处理,得到图像特征向量;
3) 堆煤检测:设计BP神经网络检测算法,检测矿用摄像仪获取得到的带式输送机机头运煤视频解析图片,最终得到检测结果。
结合上述内容,设计出如图2所示的堆煤场景检测流程图。
2.2 图像特征值提取
在图像处理过程中,比较常用的图像特征提取的算法有[5]:局部二值模式(Local Binary Pattern,LBP)特征,Haar特征,方向梯度直方图(Histogram of Oriented Gradient,HOG)特征。经过查找文献,对比三者对图像的特征提取效果得知,与其他两种算法特征描述相比,HOG算法特征提取具有比较多的优点。
具体表现如下:①HOG算法特征提取运算在图像的局部方格单元上进行,因此它对图像的几何以及光学形变均能保持最大限度的不变性,而且这两种形变仅会出现在更为宽大的空间领域上。②在较强的局部光学归一化以及在精细的方向上抽样条件下,被检测图像的少许位移,旋转等微小的动作,都可以被忽略,而不会影响到HOG特征提取的效果。因此,HOG特征提取算法适合于做图像检测,本文选定采用HOG算法对图像特征值进行提取。
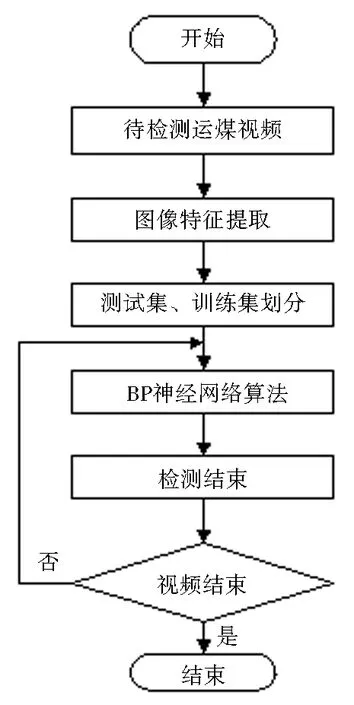
图2 堆煤场景检测流程图
2.3 BP神经网络训练
2.3.1 训练集与测试集的划分
BP神经网络检测图像的过程,需要将待检测图像划分为训练集和测试集。测试集样本与训练集的样本比例通常被划分为1∶3.
考虑到带式输送机机头运煤场景共有3种,分别为空载、正常、堆煤,为了体现本文方法的可靠性,在数据集采集过程中一共处理得到以上三种场景的数据集。每种场景采集得到80张图像,共计240张图像。随机选取每类图像的60张作为训练集,共计180张,剩余图像作为测试集,共计60张。
2.3.2 BP神经网络的训练
BP神经网络训练过程中,仅将训练集的样本训练,构造输入矩阵及输出矩阵。待检测运煤场景为3类,分别将空载、正常、堆煤数据集的标签标记为“0”,“1”,“2”。由于待检测带式输送机机头运煤状态有3类,即输出类别有3类,故应构造出3个输出神经元,设置450个隐层神经元(一般隐层神经元个数为输入神经元与输出神经元和的一半),同时根据后续实验结果得知,设置450个隐层神经元是适当的。BP神经网络训练过程如图3所示。
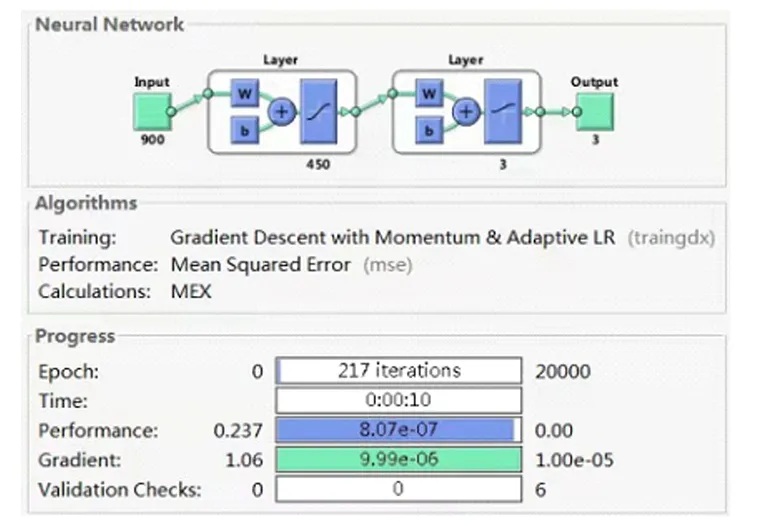
图3 BP神经网络训练窗口
由图3可知,该神经网络输入参数为900(特征向量维数),输出参数为3(3个类别),隐藏层神经元个数为450个;训练算法为梯度下降自适应LR算法,误差指标为mse,计算方式为MEX;迭代次数为217次,网络训练时间为10 s,第一次迭代网络输出误差为0.237、梯度为1.06.
2.3.3 实验结果
训练得到的BP神经网络模型在测试集上的表现,见表1。
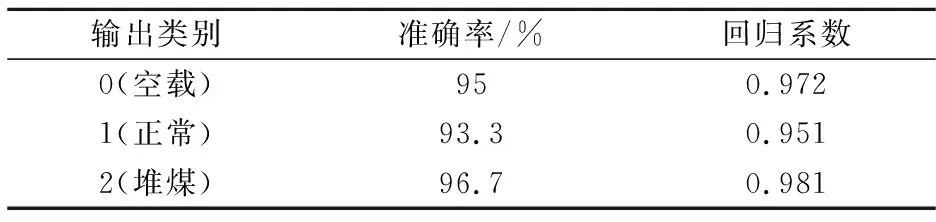
表1 带式输送机机头运煤场景检测结果
由表1可知,实验中对带式输送机机头堆煤场景检测的准确率为96.7%,回归系数为0.981;空载场景准确率为95%,回归系数为0.972;正常场景下准确率为93.3%,回归系数为0.951.
煤块正常运输时的场景检测准确率以及回归系数均较低的原因在于,带式输送机机头的煤块量介于堆煤与空载之间,对BP神经网络模型的检测精度有一定影响。
3 结 语
1) 本文提出的方法对堆煤状态检测的准确率可以稳定在95%以上,可以有效解决传统的堆煤检测方法易受煤矿井下环境影响存在的漏检、误检率较高的问题。
2) 本文提出的堆煤状态检测方法具有准确率高、低功耗等优点,具有一定的实际应用价值。
