基于机器学习和卫星图像的路径损耗预测
2022-08-07何丹萍徐卓成曹惠云殷玥吴丽娜官科
何丹萍 徐卓成 曹惠云 殷玥 吴丽娜 官科
(1. 北京交通大学 轨道交通控制与安全国家重点实验室,北京 100044;2. 北京高速铁路宽带移动通信工程研究中心,北京
100044;3. 北京交通大学电子信息工程学院,北京 100044)
引 言
无线信道特性研究对于通信网络系统性能的优化具有重要意义. 传统的信道建模方法分为统计性信道建模、确定性信道建模和半确定性信道建模三类. 目前确定性信道建模方法中的射线跟踪(raytracing,RT)法运用最为广泛,但其缺陷在于高度依赖场景的详细模型和材质参数,并且计算复杂度高.因此尚待解决的问题是:缺少三维电子地图或场景规模大、环境复杂时,如何兼顾路径损耗预测的准确性和高效性. 尤其自5G 通信系统提出以来,信道数据海量、多样,上述问题更加亟待解决.
机器学习[1]具有学习能力,可在复杂环境中自动学习数据间的非线性结构关系. 随着人工智能技术的迅速发展,相继有学者将机器学习应用于无线信道建模,并取得了一些成果:文献[2]将收发天线距离和绕射损耗作为输入,构建了多层前馈感知器(multilayer perceptron,MLP)模型预测接收信号强度;文献[3]利用神经网络改善了对城市环境中超高频(ultra high frequency,UHF)频段(300~3 000 MHz)室外信号强度的预测;文献[4]通过神经网络研究了在甚高频(very high frequency,VHF)频段(30~300 MHz)下,路径损耗与传播距离之间的关系;文献[5]在线性对数距离路径损耗模型的基础上,将频率、发射天线高度、接收天线高度等可测量特征进行主成分分析(principle component analysis,PCA),从而构建了基于人工神经网络(artificial neural network,ANN)的路损模型. 另外一些研究在信道基本特征参数的基础上,综合了地理因素:文献[6]构建双层径向基函数神经网络(radial basis function neural network,RBFNN),并将地形地貌数据、收发天线的高度、距离与载频作为网络输入预测路径损耗;文献[7]将道路宽度和建筑物之间的距离等参数作为ANN 的输入预测路损,结果优于COST-231-WI 模型;文献[8]构建了前馈神经网络(feed-forward neural network,FFNN),利用归一化地形剖面数据和距离预测路径损耗;文献[9]研究了无线通信信道中最优路径损耗预测所需的输入特征,包括纬度、经度、海拔和距离;文献[10]提出了一种基于卷积神经网络(convolutional neural network,CNN) 的毫米波路径损耗模型,将三维地图根据建筑物、发射机和地平面的高度转化成二维红、绿、蓝(red, green and blue,RGB)图,并以此作为输入,利用三维RT 法来生成毫米波信道的路径损耗指数. 然而,当前国内外有关机器学习与无线通信信道建模相结合的研究中,对于传播场景环境特征的表征方法大多基于复杂精细的测量数据与大规模计算[11-13],如何在保证准确率的前提下,简化模型、提高效率和实用性,是亟需研究并解决的.
本文基于卫星图像的RGB 信息提出了表征无线通信电波传播场景的新方法,结合距离特征构建反向传播神经网络(back propagation neural network,BPNN). 卫星图像相对易于获取,能在缺少三维场景数据的情况下对无线通信电波的传播路径损耗做出较精确、高效的预测,从而为无线通信网络系统的优化给出参考建议. 此外,使用本文建模方法和传统信道建模方法仿真同一区域的路径损耗,并对两种方法的准确率和复杂度进行了对比.
1 电波传播场景的新型表征
1.1 测量场景
本文选取典型的城区作为测量区域,测量场景中包含3 个基站:BS1 高 度62 m,BS2 高 度30 m,BS3 高度42 m,发射功率均为42 W. 分别在3 个基站附近一定范围的区域内进行测量,接收机部署于高度为2 m 的车辆上,测量频段为2.565 GHz. 根据测量数据中路测点经纬度的最大值和最小值确定测量区域的经纬度范围,下载对应范围的谷歌卫星图像.
为了能从卫星图像上获取电波传播场景的环境特征,需要确定路测点在图像上的位置. 卫星图像的空间分辨率为0.54 m,受其限制,图像的经纬度范围和实际测量区域的经纬度范围不完美匹配,因此本文通过选取参考点并计算采样间隔的方式来确定路测点在卫星图像上的像素坐标. 具体方法是:在卫星图像上根据道路特征和电子地图上的测量轨迹确定参考点,参考点的经纬度坐标已知并且在卫星图像上的像素坐标可通过测量得到. 由路测点与参考点的经纬度坐标差、采样间隔和参考点的像素,即可在卫星图像中定位路测点.
一般测量轨迹的边界点容易从卫星图像上区分,故选择边界点作为参考点并计算采样间隔. 设左、右、上、下四个边界点经纬度坐标分别为(Clon1,Clat1)、 (Clon2,Clat2)、 (Clon3,Clat3)、 (Clon4,Clat4),在卫星图像中的 像 素 坐 标 为 (X1,Y1)、 (X2,Y2)、 (X3,Y3)、 (X4,Y4). 由 于在卫星图像上横向和纵向的采样间隔存在一定差异,所以需要利用边界点的经纬度坐标和像素坐标分别计算. 定义横向采样间隔为dlon和纵向采样间隔为dlat,表示卫星图像中每个像素值在经度方向(横向)对应实际场景中的dlon,在纬度方向(纵向)对应实际场景中的dlat. 则

经过测算,BS1 卫星图像的横向采样间隔dlon=2.67×106, 纵向采样间隔dlat=2.31×106. 像素坐标以图像左上角为原点,向右为X轴正方向,向下为Y轴正方向,所以选择左边界点和上边界点作为参考点. 结合上述获取的空间采样间隔、参考点像素位置以及路测点的经纬度坐标 (Clon,Clat),可确定路测点在卫星图像上的像素坐标 (X,Y):

图1 所示为所绘制的路测轨迹,为了清晰显示,将卫星图像上以路测点为中心的正方形区域内的全部像素点标红.
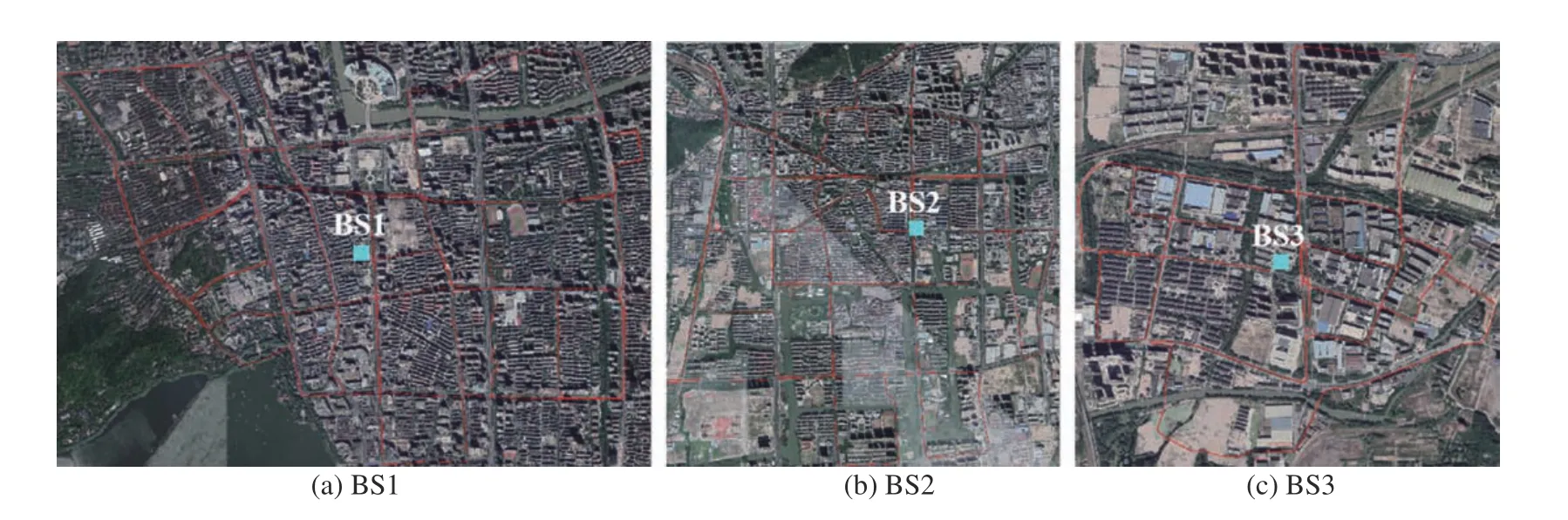
图1 卫星图像上3 个基站的测量轨迹Fig. 1 Measurement track of 3 base stations on the satellite map
1.2 场景新型表征的方法
本文定义两种传播场景的表征方法.
第一种是基于RGB 数值的传播场景表征方法.将从基站到路测点Rx的传播路径n等分,以全部等分点和路测点Rx共n个特征点为中心,分别选取一个适当大小的正方形区域. 由实验结果确定,正方形区域的边长取为7 m 左右时表征效果最好. 依次求出其中所有像素的R,G,B平均数值来表示这个特征点的环境特征,表示为 fRi,Gi,Big(i=1,2,···,n). 用特征点的环境特征近似表示整条传播路径的环境特征,得到该方法对传播场景的表征结果:
fR1,G1,B1,R2,G2,B2,···,Rn,Gn,Bng.
第二种是基于RGB 聚类算法的传播场景表征方法. 为了便于更全面有效地描述电波传播环境,需要从卫星图像中识别出各种地物类型. 本文采用无监督学习中的K-means 聚类方法,将像素的RGB 数值映射为地物类型,用直射径上各种地物类型的比例来表征传播场景的地物分布.
统计每个基站关联区域包含的地物,主要包括植被、道路、河流和建筑物,建筑物按颜色深浅分为两类. 此外受日光照射的影响,卫星图像中建筑物等地物会留下阴影,阴影覆盖了该位置原本的地物颜色,所以将阴影划为一类. 综上,聚类的个数共有6 种. 在3 个基站关联区域的卫星图像中,BS3 的图像亮度统一,所以以此为样本,每个像素的R,G,B三维数值作为一组输入. 表1 所示为聚类算法求出的6 个RGB 聚类中心及对应的颜色.
根据聚类中心可实现卫星图像像素级分类,并将分类后的每个像素绘制为所属类别对应的地物颜色,再将该聚类方法应用到其他两个基站的图像上.处理后的卫星图像如图2 所示,图中为增加区分度,绘制各种地物类型时所用的颜色相对表1 中聚类中心的颜色做了调整.

图2 K-means 聚类后的3 个基站关联区域卫星图像Fig. 2 Satellite image of the region associated with 3 base stations after K-means clustering
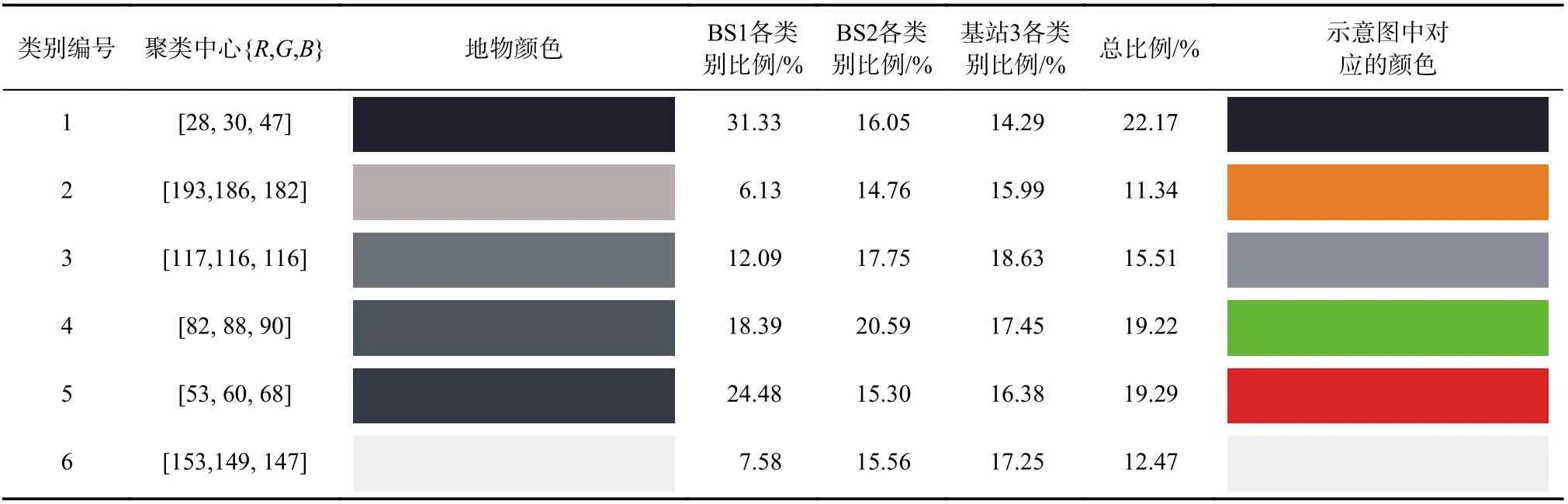
表1 聚类算法结果Tab. 1 Results of clustering


图3 环境特征示意图Fig. 3 Environmental features schematic
2 路径损耗预测模型
BPNN 的结构简单、状态稳定且易于实现,是最为经典、应用最为广泛的神经网络模型之一. 其基本思想是通过计算输出值与期望值间的误差来调整网络参数以减小误差,具有很强的非线性映射能力和柔性的网络结构. 它依靠自身强大的学习能力和计算能力,可以从有限的数据中挖掘到信道的隐含特征,进而实现对信道所处场景的识别. 此外CNN 在处理图像数据领域有着广泛的应用,对于多通道数据也能够实现有效的特征提取,但由于直接下载的卫星图像不携带分类标签,且与现有开源数据集采集设备有较大区别,难以直接利用现有CNN 算法进行语义分割和特征提取. 因此,本文选择BPNN 建立路径损耗预测模型.
2.1 网络数据集的构建
BPNN 作为数据驱动型的数学模型,网络数据集的构建将直接影响模型的预测结果. 本节结合处理后的测量数据和根据第1 节两种方法在卫星图像中提取的环境特征信息定义网络数据集,如表2 所示.

表2 网络数据集Tab. 2 Data sets for the network
将构建的网络数据集划分为训练集和验证集输入BPNN. 训练集的作用是训练网络,通过BP 算法对神经网络各节点的权重与偏置进行多次更新迭代,使预测误差减小以提高神经网络的预测精度;而验证集的作用是检验训练完成后神经网络的预测能力和泛化性是否达到要求,即神经网络能否精确预测训练集之外路测点的传播路径损耗.
2.2 神经网络预测模型的建立
本节首先给出模型预测结果的评价指标,据此选取BPNN 的超参数和结构,从而建立预测模型.
2.2.1 模型预测结果的评价指标
本文以绝对平均误差(absolute mean error,AME)、标准差(standard deviation,STD)和预测值与测量值之间的相关系数(correlation coefficient,CC)评价神经网络模型的预测性能. 三者的表达式如下所示:

2.2.2 不同网络架构的模型预测性能对比
BPNN 架构中的超参数主要包括激活函数、隐藏层层数、隐藏层神经元数目、学习率、损失函数、训练样本量以及训练次数等,超参数的选择直接影响神经网络的性能与预测的效果.
关于如何选取隐藏层层数和隐藏层神经元数目,目前还没有明确的理论与方法. 理论上隐藏层层数越深,拟合能力越强,但同时可能会带来过拟合的问题,增加训练难度,使模型难以收敛. 经过实验,本文设定隐藏层层数为两层.

对于隐藏层神经元,数目少将导致欠拟合,网络的学习能力和信息处理能力弱;而数目多则会降低网络的收敛速度,且容易导致过拟合,降低网络的泛化能力. 一般地,确定BPNN 隐藏层神经元数目有如下两个经验公式:取2~10. 本节选取第二个经验公式计算隐藏层神经元的数目. 在本文的测量场景中,3 个基站的样本量分别等于16 646,16 142,5 963,总量为38 751,将其按照70%∶30%随机划分为训练集和验证集,则训练集样本量Ns=27 125,结合两种传播场景表征方法的输入数据集维数,最终确定以直射径上等分点的RGB 平均值表示传播路径环境特征的神经网络隐藏层的神经元数目Nh2[3,15],以直射径上聚类的比例表示传播路径环境特征的神经网络隐藏层的神经元数目Nh2[7,35]. 通过大量实验,发现当采用适应性矩估计(adaptive moment estimation,Adam)参数优化算法、设置学习率为0.1、批处理样本量为780 时,BPNN 的预测效果最好.
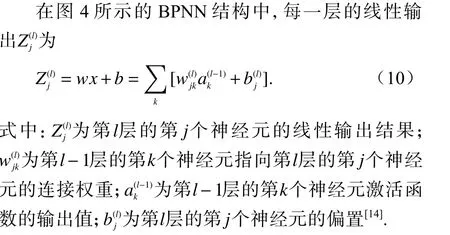


图4 BPNN 结构示意图Fig. 4 BPNN structure
根据实验结果,最终确定两种环境特征表征方法有效性最高的网络架构:含双隐层的四层BPNN 架构{25,13,13,1}和{10,35,35,1},分别限定训练次数为2 500 和1 700 以减少训练时间. 训练完成的BPNN 对验证集的预测结果如表3 和图5 所示.
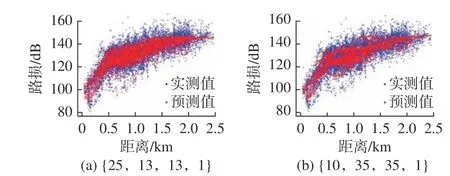
图5 不同网络架构下验证集的实测数据与预测结果Fig. 5 Measurement and predicition results under different network structures

表3 不同网络架构下模型对验证集的预测误差数据Tab. 3 Predicition errors of validation set under different network structures
由表3 可知,在设置的网络架构下,BPNN 随机预测模型在两种不同的环境特征表征方法的输入数据集下均满足AME<1 dB,STD<6 dB,CC 接近0.9,可以实现较精确的路径损耗预测. 故本文后续工作沿用{25,13,13,1}和{10,35,35,1}两种BPNN 架构,分别作为两种不同表征方法下预测模型的网络架构.
2.3 预测模型泛化能力的测试与分析
在前文中已经使用两种传播场景的表征方法分别建立起了两个以BPNN 为基本架构的预测模型,下面评估模型泛化能力的过程也就是评估这两种表征方法有效性的过程:如果从卫星地图上提取出的环境表征信息有效性高,那么预测模型对某一基站关联区域中训练样本完成训练后,也应当充分学习该区域中的环境特征对电波传播的影响方式和程度,当应用到对其他基站关联区域中训练样本的预测上时该预测模型应当可以做出精确的预测,即模型的泛化能力强,该过程就是跨基站预测的测试过程. 本文选取BS2 和BS3 的关联区域中的全部样本作为训练集,BS1 的关联区域中的全部样本作为验证集,当训练中神经网络对训练集的预测精度较高时,再使其对验证集进行预测. 分别以基于RGB 数值(等分数n=7)和基于RGB 聚类算法的方法表示环境特征并构建数据集输入对应架构的BPNN,当BPNN 完成训练后,对于训练集和验证集的预测结果如图6~7 和表4 所示.
表4 基于两种不同方法的BPNN 跨基站预测误差Tab. 4 BPNN error prediction across different base stations by two methods

图6 基于RGB 数值的跨基站预测结果Fig. 6 Results of prediction across different base stations based on RGB values
对比以上两组测试结果发现:对于训练集,基于RGB 数值的BPNN 预测性能更好;对于验证集,基于RGB 聚类算法的BPNN 预测性能更好,即以各种地物类型比例表示环境特征能够更好地协助BPNN 学习地物类型与电波多种传播路径之间的映射关系,训练的模型泛化能力更强. 分析原因有两方面:基于RGB 数值表征的环境特征维数为24,较高的输入特征维数容易造成神经网络过拟合;基于RGB 数值提取的环境信息更详细,但其中可能缺少一般化特征的维度,而存在较多的场景独有的个性化特征,引入的干扰信息降低了神经网络的稳定性和泛化性.
分析基于RGB 聚类算法的模型预测结果发现,某些路测点浮动变化较大,即距离增大很小时,路损预测结果变化较大,如图7 所示,说明这些点在所提取的环境特征差异较大. 此外由于模型输入的特征数量相对较少,同时更具有一般性,导致一定范围内路测点的预测结果相对集中,在图中形成了线状分布.
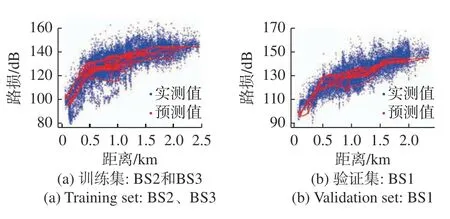
图7 基于RGB 聚类算法的跨基站预测结果Fig. 7 Results of prediction across different base stations based on RGB clustering algorithm
本节对两种预测模型的测试结论是:基于RGB 聚类算法的预测模型的泛化能力更强,即表明基于RGB 聚类算法的传播场景环境特征表征方法的有效性更好. 后文中选用基于RGB 聚类算法的传播场景表征方法的BPNN 进行分析.
2.4 与传统信道建模方法的优劣对比和分析
传统信道建模方法中的确定性信道建模的基本思想是利用传播环境的几何和电磁信息,依据几何光学理论和电磁传播理论建立无线信道模型. RT 法是目前运用最广泛的确定性建模方法,其通过准确的环境建模、天线的建模以及射线传播的建模,并基于几何绕射理论和一致性几何绕射理论进行RT 计算,实现对无线信道特性的准确刻画. 近年来不少学者为提升RT 法的仿真效率提出了多种加速方法,卓有成效,RT 法如今已经成为了一种较为普及而高效的信道建模方法而在无线通信的研究中广泛使用.
本节以基于镜像法的RT 法作为传统信道建模方法的代表,通过可以模拟移动场景和多输入多输出(multiple-input multiple-output,MIMO)信道的高性能RT 法仿真平台下的仿真程序实现[15]. 在相同计算资源(仅单核CPU 运行,无加速)的条件下,分别运行RT 法仿真模型和BPNN 预测模型对上一节中的验证数据集(BS1)进行预测,对比结果来分析两种方法的准确性和复杂度.
使用RT 法时首先需要传播场景的电子地图,其中包括地物类型和建筑物材质参数等相关信息,并运用相关的仿真软件和编写的应用程序对导入的数据进行RT 计算,得出仿真结果. 因此RT 法仿真模型不需要经过训练,且在环境特征相差较大的不同场景中均适用,预测结果较稳定,泛化能力较强. 导入BS1 关联区域的样本数据,计算仿真结果,并将误差的各项评价指标数值和运行时间与BPNN 模型对比,如表5 所示. 此外同时绘制实测数据、RT 法仿真预测数据、BPNN 预测数据如图8 所示.

表5 BPNN 和RT 的性能对比Tab. 5 Comparison of BPNN and RT performance

图8 BPNN 和RT 的预测结果对比Fig. 8 Comparison of BPNN and RT prediction
由图8 可知,RT 法的仿真数据更加分散,在数据点的分布上更加接近于实测数据,BPNN 的仿真数据则相对更集中,存在个别路测点的预测数据误差很大的情况;在运行时间方面,BPNN 远远优于RT法. 综上所述,基于卫星图像RGB 信息的BPNN 能在保证准确率的基础上,大幅度提高仿真效率.
此外,经过测试发现,RT 法的预测精度和仿真速率之间存在较大冲突. 例如当考虑电波传播机制中的反射时,RT 法的仿真速率将大大降低,这时对数以万计的路测点计算路损需要大量时间,虽然在如今RT 法所具备的加速方法的帮助下所需时间已经大大缩短,但在时间紧迫或者计算资源匮乏的情况下依然很难在限定时间内完成运算. 而不考虑反射因素则使得预测精度降低,例如当对上一节的训练数据集和验证数据集中的全部路测点做出预测时,各项评价指标数值分别是:预测数据与实测数据之间的CC 等于0.84,AME 等于0.04 dB,STD 等于6.69 dB. 该测试结果相比此前BPNN 分别对训练数据集和验证数据集进行预测的结果总体稍差一些,并没有显现RT 法具有的基于复杂运算而仿真能力更强的优势. 而基于本文提出的信道场景表征方法构建的BPNN 由于算法所需的运算量小,当计算资源受限时也可以在很短的时间内实现较高预测精度,这正是其相对传统信道建模方法的优势所在.
3 结 论
本文提出了基于机器学习和卫星地图的电波传播路径损耗预测模型. 基于卫星图像的RGB 颜色信息提出了两种表征电波传播场景的方法,在此基础上利用BPNN 实现路径损耗的预测. 本方法的预测结果与实测数值之间的CC 达到了0.83,AME 控制在0.66 dB,STD 控制在6.65 dB. 结果表明,本文模型的准确度较高,相比于依赖高精度场景参数的传统信道建模方法,实现了实用性和高效性等方面的提升. 这对于电波传播特性和无线信道特性的研究提供了新思路和新方案,对于无线通信系统的优化具有指导意义.
本文尚未解决的问题是BPNN 跨基站预测的精确度不够稳定,即如果更换研究场景,模型难做出同等精确度的预测. 解决该问题需要进一步优化对电波传播场景的表征方法,改善基于卫星图像的信道特征提取方式,例如利用RGB 信息表征建筑物高度等场景特征[16],从而实现对不同场景更加稳定和准确的电波传播路径损耗预测.
