选矿磨机给料实时块度分析系统研究与应用
2022-08-06洪嘉阳唐雅婧葛启发张维国
洪嘉阳,唐雅婧,葛启发,张维国
(中国恩菲工程技术有限公司,北京 100038)
0 前言
磨矿作业在整个选矿的工艺流程中不仅是一个重要的生产工艺过程,其工作效率及产品质量还对选矿指标及经济效益产生重大影响。因此磨矿分级作业的优化、稳定控制对选矿过程的提升指标、节能降耗、安全生产有着重要意义。按照采场生产计划,通常采出原矿在一定时期因矿岩属性、结理发育、爆破和粗破效果等各种原因而存在物理性质的波动,原矿往往块度大的难磨、块度小的易磨,因此磨机给料需要分级,建立块度的准确识别对提升磨矿效率非常重要。磨矿过程存在大惯性、参数时变、非线性等特点,全流程控制和调节存在多变量输入和输出。磨矿分级系统稳定运行的关键因素是给矿的稳定性,其中给矿的硬度、块度和给矿量对磨矿过程影响最大[1]。
在选矿生产流程中,人工取样和筛分是最常见的矿石块度分布检测方法,这种方式操作简单,适应性强,但在实际生产管理过程中存在人力消耗大、监测数据滞后、无法实现实时在线检测等缺点。数字化、自动化、智能化是智能选矿厂未来的发展趋势。随着机器视觉、通讯技术和控制技术的快速发展,选矿厂的磨矿分级系统成为解决磨机给料控制主要手段[2]。本文围绕图像采集、矿石块度分析和数据传输与控制,研究和开发了选矿磨机给料实时块度分析系统,实时获取准确的磨机给料的块度分布信息,为磨矿过程的自动控制奠定基础。
1 实时块度分析技术路线
选矿磨机给料实时块度分析系统基于分水岭算法对给矿块度图像进行分析,先对采集矿石图像,再处理图像分割算法,最后将结果通过工业以太网传给智能控制系统(DCS)对皮带进行控制。
矿石块度的识别通过高速工业摄像机实时采集给矿皮带上原矿矿石的图像数据,图像数据采集可以通过多路工业摄像机采集。在应用处理部分将高速工业摄像机采集的图像通过交换机,传输到WEB 服务、数据库服务和算法服务处理,其中算法将给矿块度图像进行分割算法处理,并将块度数据进行量化(如F20、F50、F80),对最终的给料块度计算合成得到矿石块度的大小和粗细信息。计算结果作为进一步数据处理和数据展现内容传输到数据库服务和WEB 服务。选矿磨机给料实时块度分析系统的核心是算法服务,算法服务将实时采集的图像信息通过软网关与用于过程控制的软件交互,最终结果通过块度分析系统的WEB 服务前端界面展示块度分析结果和视频监控矿石状态。选矿磨机给料实时块度分析系统整体结构如图1 所示。

图1 选矿磨机给料实时块度分析系统结构
2 高速图像采集技术
图像采集技术是决定矿石块度图像能否精确检测的关键因素[3]。块度图像采集的数据量大,实时性要求较高,因此采用高速工业相机结合以太网光纤的连接方式来完成块度图像的采集。图像数据采集完成后,使用CAT5E 屏蔽网线通过交换机将数据发送至服务器。
高速工业摄像机具备较好的防尘性能,并配备补光光源照明系统,由2 个LED 光源组成,安装在工业摄像机的两侧,为摄像机提供稳定光源。工业相机和照明系统安装在带式输送机上方。其采用AC220V 50 Hz 进行供电,设备内集成散热设备,可以在速度为5 m/s 的皮带上采集高清矿石图像,提供清晰可靠的图像供分析。
现场的图像获取设备由八台高清工业摄像机和八台LED 辅助光源组成,分别放置于六台皮带给料机、一台磨机给料机和一台长距离皮带运输机上方1.5 m 处。现场采用的给料机有物理分矿能力,一般情况下皮带上的矿石分为以下两种情况:以粉料为主带少量粗料和粗料为主带少量粉料。矿石被给料机分给位于磨机给料机皮带左右两侧的六台皮带给料机,其中一号、二号给料机的矿石较细;三号、四号给料机的矿石适中;五号、六号给料机的矿石较粗。

图2 图像采集装置布局示意图
选矿磨机给料实时块度分析系统使用Http 协议和Http Basic Authentication 基本认证对摄像头的数据进行采集。Http 协议具有通信速度快的特点,采用此方式可极大节省传输时间。每组摄像头通过Http 接口向摄像头请求一个分辨率为2 304 ×1 728格式为JPEG 图像(快照),获取图像的速率不应高于1 帧/S(fps)。当请求发出之后,摄像机将返回指定的JPEG 图像。设备每15 s 连续抓拍两张高清矿石图像传送至服务器指定的image 文件夹并保存,服务器分别保存来自八组摄像机最新的100 张图像。采集矿石块度图像的实时性和清晰度将直接影响后续图像分割算法的效果。
3 磨机给矿实时块度图像分析
3.1 改进分水岭算法分割矿石块度
通过分析粉料、混合料和粗料图像的特点发现:粗料上有小颗粒,对于大块的矿石还会有大的棱角和色块,采用简单的图像分割算法很难抵抗粗矿石表面的干扰。结合常用图像分割技术来克服矿石图像中的干扰,采用改进的分水岭算法进行图像分割[4-5],对分割线进行绘制。本文采用Python 语言对选矿磨机给料实时块度分析系统进行开发,并调用Opencv4.5.3 计算机视觉库实现图像分割算法。Opencv 是一个开源的支持多平台的计算机视觉库,具有Python 接口可以实现实时图像处理和计算机视觉算法应用。
分水岭算法被广泛应用于图像分割任务中,尤其适合矿石图像分割。分水岭算法是以地理学中的地形地貌图为启发,像素点的灰度值被类比为海拔,分水岭算法模拟的是浸水过程。图像中不同灰度值的区域就对应于山峰和山谷盆地。分水岭线则是对应盆地的边缘。本文采用基于标记的分水岭算法进行优化,标记的定位和大小直接影响分割效果。通常情况下,计算出前景标记和背景标记,修改分割函数以便于其只在标记所定位的地方有区域最小值。最后,基于标记去进行分水岭变换得到分水岭分割线[6-7]。
详细的图像分割算法可描述如下:设灰度图像f的最小灰度值为hmin,最大灰度值为hmax,阈值确定为T。首先检测出图像局部的最低点hmin,将这样的点逐一标记出来Mi(i=1,2,…,n),Mi为最小值点集,n为像素值为hmin的点的个数。以Mi为标记点,用Nk(Mi)表示点Mi的邻域,点Mi所对应的区域为:

式中:CT(Mi)为集水盆地;点p作为标记点将进行区域生长,直到没有满足阈值T的点为止。假设对N个种子点进行区域生长,hmin对应的集水盆地为:

从而得到hmin对应的集水盆地。h=hmin+1,当h<hmax+1 重复以上步骤,直到得到所有集水盆地,将集水盆地的边缘作为图像分割的分界线。
改进的分水岭图像分割算法的处理过程分为五步,第一步是对输入的图像采用双边滤波函数处理,要在保留矿石边缘的同时尽可能的模糊粗矿石表面的干扰。粗矿石表面的干扰较强,边缘也较强,所以可以使用双边滤波算法来做边缘保存。通过经验和实践选取双边滤波函数的参数为每个像素周围邻域的核直径设置为25,颜色空间方差的参数设置为100,坐标空间方差的参数设置为25。第二步操作包括图像灰度化,自适应阈值操作和两个中值滤波器,主要目的是将图像二值化,因为分割算法的目标是按矿石轮廓进行分割,所以先对图像进行二值化操作可以大大降低后续处理的难度。设置中值滤波的核为3,防止矿石边缘被打断。在自适应阈值操作前后分别对图像进行中值滤波。第三步是形态学腐蚀操作和一个中值滤波,因为轮廓闭合操作会使大量边缘没闭合且连接的区域相连,导致小颗粒大范围欠分割。过度的形态学操作也同样不可取。采用较大的中值滤波器核和一个5 ×5 的变形椭圆进行腐蚀操作。第四步是选定有效区域进行矿石块度信息分布统计,采用分水岭变换基于经过提取出的标记绘制分割线。选矿磨机给料实时块度分析系统中改进分割算法对矿石图像处理各阶段的效果,如图3 所示。
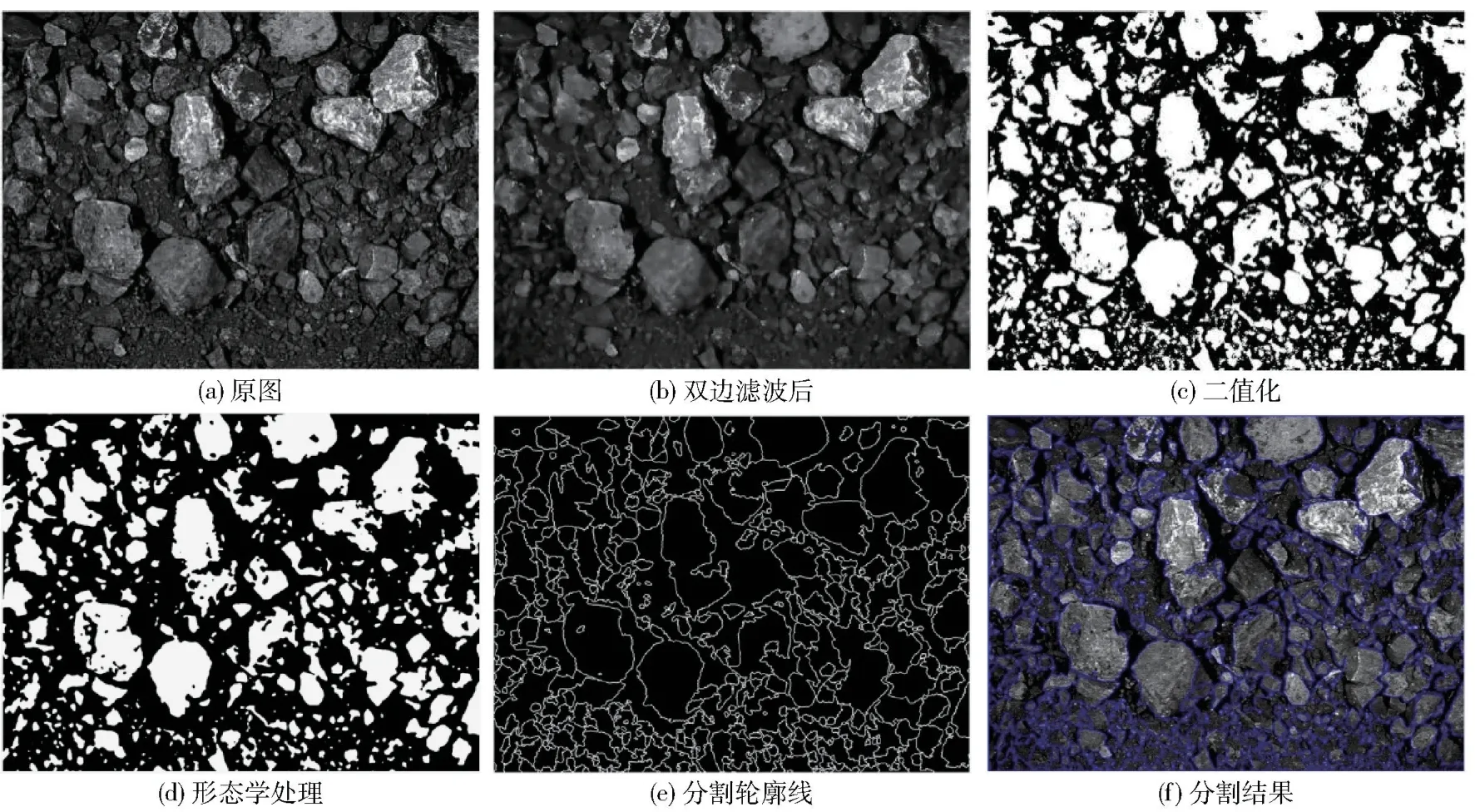
图3 改进分割算法对矿石图像处理
3.2 实时给矿块度评估参数
实时矿石块度分析系统的目标是从图像中获取矿石粗细的信息。现场采用高速摄像机和辅助光源等硬件设备将对皮带给料机上的矿石进行实时监控。开发能够准确分割矿石图像的分割算法,最后将分割结果转换成粗细信息。目前最广泛使用的评估矿石粗细的参数是基于粒度分布的F80 参数[8-9],其是指80%的矿石可以通过的筛孔尺寸,也可以理解当累加重量达到总重的80%时,临界矿石的粒度就是F80 参数的值。计算F80 参数需要将二维的矿石轮廓信息先转换为三维的矿石粒度信息后再进行统计得出。计算过程如下:
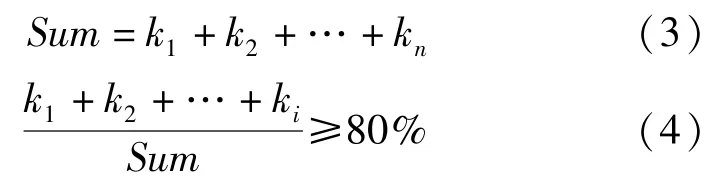
n是颗粒的总数,k1,k2,…,kn分别是图像中所有分割区域转换成颗粒的重量,k1,k2,…,ki分别是分割区域中粒度小于F80 的颗粒重量。ki就是F80参数的取值。
F80 本质是一个三维的衡量参数,需要将二维分割区域转换成颗粒的三维粒度信息后再进行统计计算。对于自动控制系统来说量化粗细参数被用于调整磨机功率,因为给料粗细是一个相对随机的过程,采用块度分布调节效率相对较低,常用的方法是抽象出单一的量化参数进行评估,效率高且区分度大。常用的二维轮廓转三维粒度信息的模型包括等面积圆、最大内接圆、弗雷特直径、最小外接圆、拟合椭圆、最小外接矩形等。每种模型都有最适合的颗粒形状,如果根据图像中每个颗粒的二维形状来选取模型,则带来的运算量大,并且处理时间也会更长。如果用一种转换模型处理图像中所有颗粒就会带来误差,例如采用拟合椭圆的长轴代表类三角形矿石的粒度带来的误差就非常大。采用不同模型对图像的分割结果进行统计分析,结果显示,对于等面积圆、拟合椭圆(短轴)、最大内接圆、弗雷特直径(x轴)显示出的粗细趋势均是正确的。根据选厂的实际筛分结果本系统采用等面积圆粒度模型进行F80参数的计算。
目前最常见的F80 参数,其本质是一个块度分布情况统计,可以结合F50、F20 一起使用。改进分割算法对矿石图像处理后块度分布的柱状图和累积块度分布折线图,如图4 所示,可以看出该图的F80值为12.51 cm、F50 值为7.07 cm、F20 值为2.76 cm。试验结果证明了所开发的系统可以进行准确地分割粉料、混合料和粗料图像,为下一阶段的DCS 控制系统智能配矿奠定了基础。

图4 累积块度分布
4 数据的传输与展示
4.1 可视化管理操作界面
基于分水岭算法的矿石块度分析系统,目前已经应用于工业现场。系统开发分为前端、后端并于数据库服务器通信。前端基于HTML5、CSS3、JavaScript、Vue 框架实现,后端基于Node.js,数据库采用MySQL。系统可以实现连接工业摄像头,展示实时视频,对实时矿石图像分割。
实时监控页面,展示已成功连接摄像头实时回传的画面,展示处于皮带上矿石的状态,视频监控画面如图4 所示。通过实时监控页面,用户可以直观的获知各个摄像头的工作状态是否正常,皮带运行结果是否正常。
点击块度分析进入矿石块度分析界面,系统显示摄像头实时画面,以及分水岭算法处理后的结果图,矿石粒径和累积粒径分布图表,(F80、F50、F20)值的实时折线图15 s 更新一次,(粗矿、中矿、细矿)所占百分比的实时折线图15 s 更新一次,可以更直观观察皮带上矿石的粗细变化趋势。

图5 视频监控画面

图6 矿石块度分析画面
视频管理页显示已经成功添加的设备信息。提供“添加设备”“编辑设备”“查看详情”“删除设备”操作。通过设备列表,用户可以清晰的获知当前应用所连接的摄像头,及摄像头运行相关的参数信息,如:设备型号、设备地址、设备运行状态等信息。
为了对块度图像的识别更加准确,本系统提供了块度图像的区域选择功能,能够实时更改图像分析的区域。如图所示可以对8 个摄像机实时拍摄画面进行区域选择,点击开始可以区域选择,点击保存系统将使用选定区域进行图像分析,清除按钮可以删除选框。同时页面将实时显示选框的起点横坐标、起点纵坐标、长度、宽度、面积等信息便于用户能更精确的选择块度分析区域。
4.2 DCS 控制系统通信
在磨机设备安全工作的前提下,根据半自磨机运行功率、给矿粒度等状态参数,通过DCS 控制系统对半自磨机给矿量、给水量实现连续不间断的智能调整,并实现半自磨根据浮选情况调整供矿量,对半自磨的磨矿过程进行精细控制,以最大化提高磨机处理量,保证磨矿产品粒度,提高磨矿产能及指标。通过检测出的实时矿石块度F80 值,可指导DCS 智能控制系统调节粗、中、细矿的比例分配,以便于实现智能配矿。
图7 视频管理画面

图8 块度分析区域选择画面
本系统以中国云南省某选厂DCS 系统为基础,选矿磨机给料实时块度分析系统采用艾默生公司的智能控制系统DeltaV DCS,使用第三方OPC 连接包以确保分析系统与控制系统之间数据的转换具有鲁棒性。在服务器上安装OPC Mirror 模块实现智能控制系统的数据与远程OPC 数据采集站OPC Server间的通讯。搭建OPC UA 服务器,安装KEPServer-EX 软件搭配python 中的opcua 包,与图像分割算法建立实时通信,将矿石块度图像的F80 值实时传输给DCS 系统。
5 结论
针对选矿磨机矿石块度高速在线检测的实际需要,提出了一种具有通用性的实时块度分析系统,该系统可以对皮带上的矿石进行高速在线图像采集,分割采集到的矿石图像,量化统计分割后的图像信息,通过OPC 通讯将矿石块度参数传输至选厂自动化系统。
安装八台高清工业摄像机和八台辅助照明系统用于实时采集各下料口处的矿石块度图像,为后续的算法分析提供了清晰可靠的图像。
对矿石图像采用改进后的分水岭图像分割算法处理可实现对各类矿石图像的高精度分割。同时采用等面积圆计算F80 值,高效且准确的衡量矿石的粗细程度及变化。
实践结果表明,该系统操作合理,检测方便,可视化效果好,完全满足实时矿石块度分析技术要求,解决了由于缺乏块度检测分析系统而无法实现给矿块度的自动配比这一难题,同时为今后智能选矿厂的发展提供参考。
