车路协同V2X仿真验证系统设计
2022-08-06李翠萍赵鹏超苑寿同魏文渊
李翠萍 赵鹏超 胡 鑫 苑寿同 魏文渊
(中汽数据(天津)有限公司,天津 300393)
0 前言
车路协同技术作为智能交通发展的前沿技术和发展趋势,为交通效率的提升和交通安全的增强提供了新的实现途径,也为交通行业的发展带来了全新变革。通过车-路-云之间的高效通信,车路协同技术可以有效解决传统交通环境下难以解决的复杂问题,实现交通流高效、有序、安全地运行。随着车联网(V2X)相关标准的出台和车路协同技术的迭代升级,各类V2X设备也不断更新。目前,车路协同技术仍处于发展初期,相关技术标准尚不完备,产品的配置和设备的性能都存在较大差异,亟需开展相关试验测试,以验证车路协同设备互联互通一致性及场景应用功能的有效性和稳定性。
V2X测试验证形式可分为虚拟仿真测试、封闭场地测试和开放道路测试。虚拟仿真测试通过模拟车路协同环境开展测试验证;封闭道路测试和开放道路测试则要求车辆在测试场地中开展实车测试。实车测试需要耗费大量人力和物力,且在测试数据采集的准确性、测试的可重复性及测试场景的复现性等方面存在一定难度和限制。因此,构建V2X模拟环境,借助仿真技术进行车路协同测试及验证具有重要意义。
目前,针对V2X仿真验证系统的研究大多采用改造后的V2X设备作为测试系统,但该系统无法支持多节点、复杂场景和大规模场景模拟的需要,也不便于灵活配置设备工作带宽和工作频点。为了尽可能地满足测试需求,提高调频效率,满足技术迭代和演化需要,选取专用测试仪表进行V2X射频信号模拟,并采用全球卫星导航系统(GNSS)模拟器进行位置和时间信息同步,尽可能真实地模拟出车路协同通信环境。在工控机上使用Prescan软件搭建不同的测试场景环境,并借助Simulink软件对仿真控制模块进行搭建与设计,可满足V2X设备的多样化测试需求。在车路协同V2X仿真验证系统设计时,一方面可采用GNSS模拟器进行信号模拟,该模拟器同时支持全球定位系统(GPS)和北斗卫星导航系统,被测器件(DUT)和V2X协议栈设备需通过解析模拟GNSS信号的参考时钟及网络电视软件(PPS)信号,进行载波同步和时间同步,以增加仿真时间和仿真位置的灵活性;另一方面可采用面向仪器系统的外围组件互连(PCI)扩展(PXI)控制器,作为多台远程车辆或多个路侧单元(RSU),通过V2X射频模拟器同时模拟不同消息的发送,来满足复杂场景的仿真需求,开展大规模压力测试。
1 验证系统组成
新设计的V2X仿真验证测试系统可实现对车路协同设备互联互通一致性的验证,也可通过搭建不同的仿真场景实现对其软件和硬件全场景功能的验证。
1.1 系统总体架构
全新的V2X仿真验证系统总体架构如图1所示。该系统架构由工控机、PXI 控制器(含GNSS模拟器及V2X模拟器)、V2X协议栈设备、驾驶模拟器和人机界面(HMI)等组成。
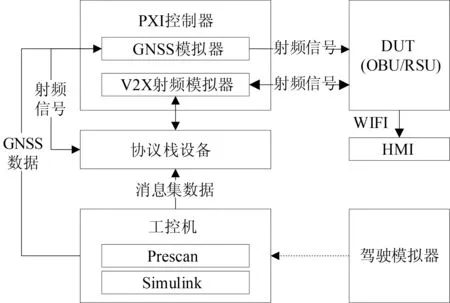
图1 仿真系统总体架构
1.2 系统软硬件组成
验证系统的硬件设备组成及功能见表1。验证系统的软件组成及功能见表2。测试系统仿真信号发送端选用了定制化通信测试仪表,可以实现稳定功率信号发送,且支持多接口异步发送; V2X协议栈设备可对仿真场景的数据进行消息层、安全层和网络层封装;驾驶模拟器选用了罗技G29驾驶模拟装置;HMI则采用安装DUT的应用软件进行预警图像显示与语音播报。
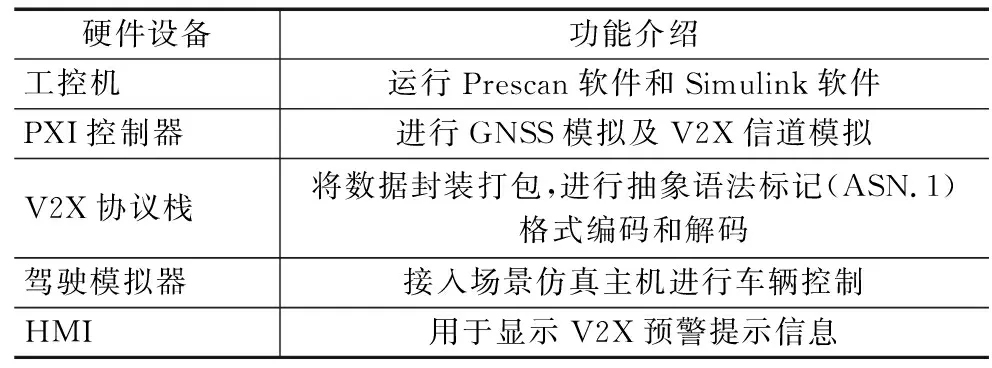
表1 验证系统硬件组成
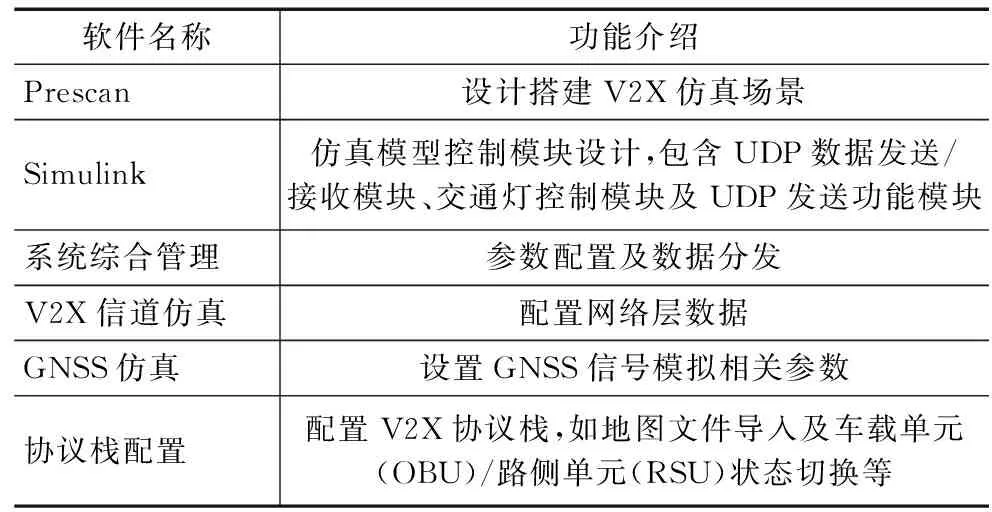
表2 验证系统软件组成
2 V2X仿真验证
2.1 V2X硬件在环验证工作原理
在环验证采用工控机运行Prescan软件和Simulink软件。在Prescan软件中可设置背景交通参与者、待测车辆的行驶轨迹和速度,将DUT作为待测车辆,其他的背景交通参与者由测试系统仿真模拟;在Simulink软件中可设计必要的通信模块,以实现仿真场景数据发送及预警信号的接收。为提升发送效率,减少协议建立连接的时延及记录双发收发状态的额外投入消耗,采用了用户数据报协议(UDP)形式来实现仿真主机与协议栈设备和OBU的通信。此外,按照车联网应用层标准通信协议设计相关消息集的封装及发送模块的要求,OBU预警信号同样采用了UDP形式传回至预警信号接收模块。在Simulink软件中设计的UDP数据发送/接收模块及交通灯控制模块,可将仿真场景中的GNSS数据和V2X消息以UDP形式进行打包发送,而GNSS仿真软件则将仿真场景中的GNSS数据处理为GNSS信号,再由GNSS模拟器通过射频形式广播发送,提供给来自GPS的参考时钟和PPS信号。仿真场景中的V2X消息先由协议栈设备进行ASN.1编码处理,再经过V2X信道仿真软件进行配置,最后通过V2X信道模拟器以射频形式经由直连通信接口(PC5)发送给DUT,DUT接收信号后触发相应的场景功能,在HMI上显示图像和语音播报的同时,以UDP形式将相关预警数据回传至Simulink软件中的UDP接收模块。
2.2 验证流程
仿真验证流程包括测试场景搭建、仿真运行、测试结果记录和数据分析3个步骤,其基本流程如图2所示。
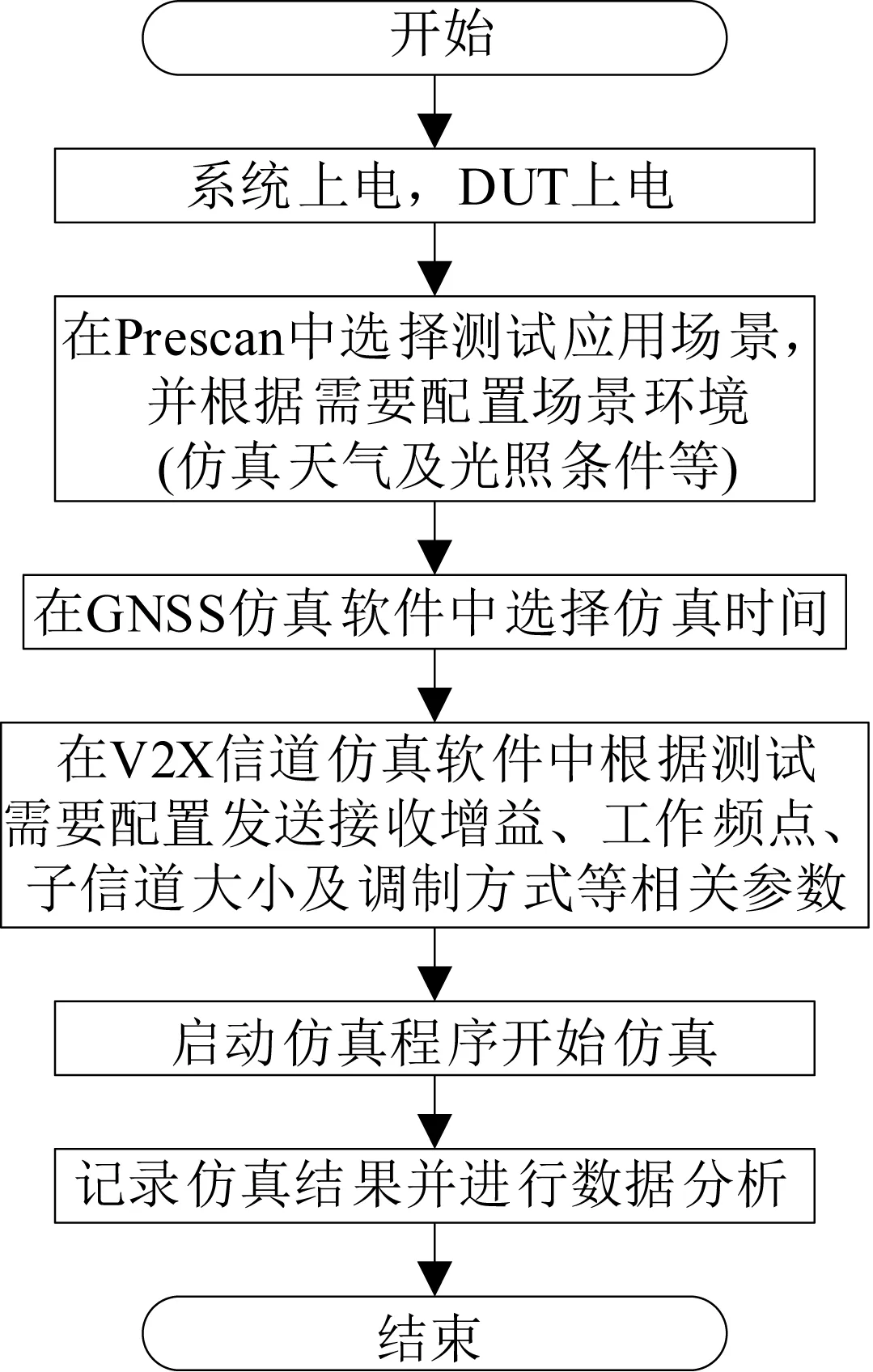
图2 仿真测试流程
进行仿真测试时,在Precan软件中选择测试仿真场景,对GNSS仿真软件中的时间和信道仿真设备信号调制中的相关参数进行设置。启动仿真程序后,采用重复测试脚本的方式来控制重复仿真测试次数,并保存测试数据。当程序运行结束后,将获得的测试数据进行统计和分析。
3 验证样例分析
本文以闯红灯预警应用功能为例进行仿真验证系统应用功能的验证。
3.1 闯红灯预警(RLVW)应用功能验证
RLVW应用功能是以当前车辆的位置、车速及其他交通参数为依据,通过算法预测车头经过路口停止线时信号灯的状态,并根据预测结果向驾驶员发出预警的一种功能验证方式。基于汽车制动动力学,预警距离的表达式为:

(1)
式中,为驾驶员的平均反应时间,根据我国《智能运输系统车辆前向碰撞预警系统性能要求和测试规程》(GB/T 33577—2017)的要求,其值为0.66~1.20 s;为制动间隙消除时间,其值为0.15~0.90 s;为制动力增长阶段,其值为0.20~0.90 s;为制动前速度,单位m/s;为制动后速度,单位m/s;为制动平均减速度,其值为6.86~8.40 m/s;为车辆在制动结束后与目标点位的安全距离,其值应大于3.0 m。
在对车辆V2X预警提醒功能验证时,预警算法及相关参数的设计应结合车辆制动性能来设置定制化的预警算法参数,同时还应考虑符合我国驾驶员驾驶习惯的相关人因工程参数。本文根据上述参考值估算了碰撞类安全预警距离范围,将制动相关时间的最小值和减速度的最大值代入式(1),得出最迟的预警距离;将制动相关时间的最大值和减速度的最小值代入式(1),得出最短的预警距离。预警碰撞时间(TTC)为预警距离与当前车速的比值,该参数也可作为验证评价指标。
在Prescan软件中,选择闯红灯预警功能进行了不同车速下的重复测试,仿真测试场景如图3所示。测试车辆在距离停车线约400 m的位置,由静止出发,经行驶状态调整后加速至测试要求的车速,并保持匀速驶向路口,此时,路口对应车道方向的红绿灯状态保持为红灯。本文探讨的预警距离是测试车辆与路口停止线的相对距离,即车辆的实时位置与其所在车道中心线点集合中最后1个点位之间的距离。
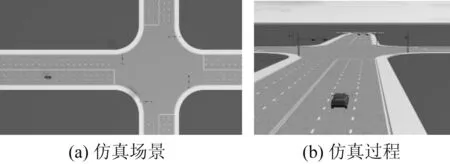
图3 仿真测试场景
闯红灯预警场景数据交互需求包含地图消息及交通灯相位和时序消息(SPAT)。该测试车辆Simulink软件模型中,包含有主车及主车位置数据发送模型、信号灯及信号灯控制模型、 地图信息及SPAT消息封装发送模块(图4)。
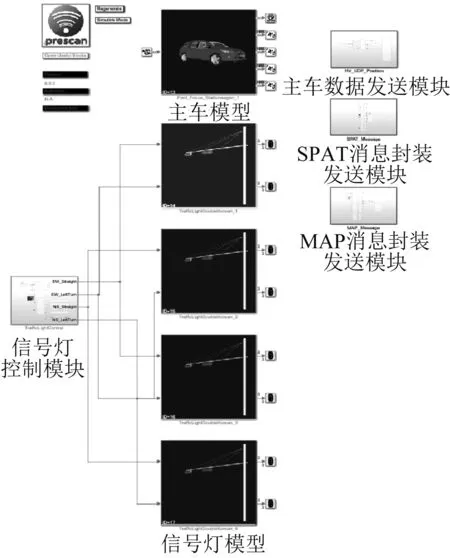
图4 闯红灯预警测试用例Simulink模型
3.2 验证结果分析
本文以车速为40 km/h的测试条件为例,说明RLVW应用功能的验证结果。当测试车辆以40 km/h的车速驶向信号灯状态为红灯的路口时,RLVW预警功能应在车辆距离路口停车线20.5~40.3 m的范围内发出预警,提示驾驶员注意前方路口信号灯为红灯状态,对应的TTC为1.8~3.6 s。按照验证流程,需进行多次重复测试来验证。多次试验表明,该仿真验证系统可触发闯红灯预警提醒功能。图5为其中某次测试的验证结果。从图5可知,在此次测试验证中,RLVW预警在车辆距停车线34.4 m时触发预警信号,TTC为3.1 s,预警触发时机合理。

图5 RLVW应用功能测试
4 结语
本文针对车路协同应用功能验证需求,设计了车路协同V2X仿真验证系统。该验证系统包含了GNSS模拟功能、V2X的消息模拟和信道模拟功能,可对真实卫星信号和真实V2X通信环境进行模拟,实现了车路协同硬件在环V2X仿真验证。根据验证需要,选用了符合要求的测试用例进行测试验证。测试结果表明,该仿真验证系统验证操作流程快速高效,结果有效且可重复性强。基于汽车制动动力学,本文采用了较为宽泛的评价指标对车路协同预警提醒时机进行了分析,下一步还将对预警时机的设置开展更为全面的研究。